

TEP / lekcher_1
.2.pdfКОНСПЕКТ лекций по дисциплине «Теория электропривода»
Старший преподаватель кафедры «Электропривод и автоматизация промышленных установок»
ГУВПО «Белорусско-Росийский университет »Слука М.П.
Часть 1.2 2011 г.
Содержание |
|
1. Основы теории обобщенной электрической машины |
4 |
1.1.Обобщенная модель электромеханического преобразователя энергии
4
1.1.1.Идеализированная машина Уайта - Вудсона. Понятие.
Допущения. |
4 |
1.1.2. Схематичное представление двухполюсной обобщенной машины
в осях α β - d, q; |
5 |
1.1.3. Электромеханическая динамическая характеристика обобщенной
машины в осях α β - d, q; |
5 |
1.1.4. Механическая динамическая |
характеристика обобщенной |
двухполюсной машины. |
7 |
1.1.5. Особенность математической модели для явнополюсных машин8
1.2. Координатные преобразования уравнений обобщенной машины |
8 |
|
1.2.1. Схематичное представление модели в осях U,V |
8 |
|
1.2.2. |
Уравнения преобразования координат |
10 |
1.2.3. |
Инвариантность координатных преобразований |
11 |
1.2.4. Уравнения динамической механической характеристики машины
в осях U,V |
12 |
1.2.5. Структурная схема обобщенной машины в осях U,V |
14 |
1.3. Уравнения механической характеристики машины в комплексной |
|
форме |
14 |
1.3.1. Уравнения обобщенной машины в системе координат α β |
16 |
1.3.2. Уравнения обобщенной машины в системе координат d, q |
16 |
1.3.3. Уравнения обобщенной машины в системе координат |
X-Y, |
ориентированной по вектору Ū1 |
17 |
1.3.4. Уравнения обобщенной машины в системе координат X,Y, |
|
ориентированной по вектору Ψ2 |
18 |
1.3.5. Возможность реализации двухканального управления машиной в
системе координат, ориентированной по полю |
|
19 |
|
1.3.6. |
Структурная схема машины в осях X,Y, ориентированной по |
||
вектору Ψ2 |
|
20 |
|
1.4. Фазные преобразования координат |
|
20 |
|
1.4.1. |
Векторная диаграмма потоков для |
трехфазной/двухфазной |
|
системы |
|
20 |
|
1.4.2. Общие формулы фазных преобразований переменных |
20 |
||
1.4.3. Инвариантность фазных преобразований координат |
23 |
||
1.4.4. |
Формулы фазных преобразований переменных при соединении |
||
обмотки статора звездой с изолированной нейтралью |
24 |
||
1.4.5. |
Формулы фазных преобразований переменных при соединении |
||
обмотки статора треугольником или звездой с нулем |
24 |
||
1.5. Режимы электромеханического преобразования энергии |
25 |
||
1.5.1. |
Общая оценка режимов электромеханического преобразования |
||
энергии |
|
25 |
|
1.5.2. Условия установившегося процесса электромеханического
преобразования энергии |
|
|
25 |
|
1.5.3. |
Динамическая и |
статическая жесткость |
механической |
|
характеристики машины |
|
|
25 |
|
1.5.4. |
Ограничения, |
накладываемые |
на |
процессы |
электромеханического преобразования энергии |
|
25 |
||
1. Основы теории обобщенной электрической машины
1.1. Обобщенная модель электромеханического преобразователя энергии
1.1.1. Идеализированная машина Уайта - Вудсона. Понятие. Допущения.
Идеализированная электрическая машина представляется как электромеханический преобразователь энергии. В общем случае электромеханический преобразователь энергии можно представить в виде многополюсника на входы которого поступает электрическая энергия, а на выходе снимается электромагнитный момент.
Электромеханический преобразователь энергии – идеализированный двигатель ротор которого не обладает механической инерцией.
В теории электрических машин доказано, что любая многофазная машина с n-фазной обмоткой статора и m-фазной обмоткой ротора может быть представлена двухфазной моделью. Поэтому математическое описание процессов во вращающейся электрической машине получают на основе рассмотрения её двухфазной модели, которая получила название обобщенной электрической машины.
Существуют два метода, позволяющих получить уравнения электромеханического преобразователя энергии. В результате, полученные уравнения справедливы для любой электрической машины:
1) метод Крона;

2) метод Уайта – Вудсона;
Идеализированная машина Уайта – Вудсона предполагает следующие допущения:
1)магнитная цепь машины ненасыщенна, энергия магнитного поля сосредоточена в магнитном зазоре:
2)отсутствует гистерезис и электрические потери в стали;
3)машина симметрична, т.е. сопротивления фаз статора и ротора равны.
4)имеет место синусоидальное распределение МДС в зазоре;
5)воздушный зазор равномерный. Для учета неравномерности следует провести аппроксимацию;
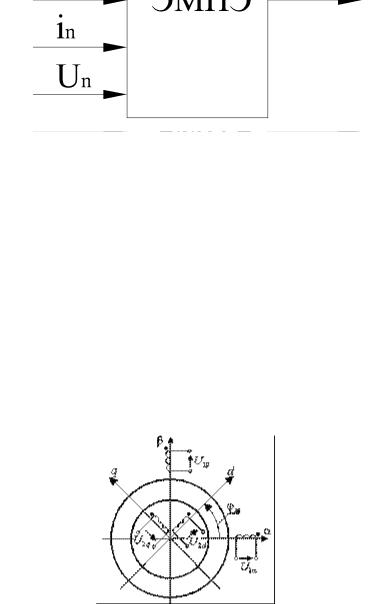
1.1.2.Схематичное представление двухполюсной обобщенной машины в осях α β - d, q;
В общем случае схематичное представление двухполюсной обобщенной машины в осях α β - d, q имеет следующий вид:
Рисунок 1
1.1.3.Электромеханическая динамическая характеристика обобщенной машины в осях α β - d, q;
В соответствии с законами Кирхгофа запишем уравнения для контуров:
(2)
где R1 и R2 – активное сопротивление фазы статора и приведённое сопротивление фазы ротора.
где определяется по формуле:
(3)
где Mks – взаимная индуктивность проводников; Lk – собственная индуктивность;
ik, is – токи в соответствующих контурах;
Для обобщенной записи применим следующее обозначение собственной и взаимной индуктивности:
Lij,
где i – в какой обмотке наводится ЭДС i = 1a, 1b, 2d, 2q;
j - указывает током какой обмотки она создается j = 1a, 1b, 2d, 2q. L1a1a – собственная индуктивность;
L1a1b – взаимная индуктивность a и b.
(4)
Примем, что машина неявнополюсная, тогда можно сделать вывод:
1)собственная индуктивность статора и ротора не зависит от их взаимного положения т.е.:
(5)
2)взаимные индуктивности между статором и ротором равны нулю, т.к. они взаимно ортогональны;
3)взаимные индуктивности статора и ротора проходят полный цикл при повороте на 360 электрических градусов. Тогда получим:
(6)

Уравнения (2) являются однотипные, и их в можно записать в обобщенной форме:
ui = Ri ii +dΦi dt |
(8) |
где i= 1a, 1b, 2d, 2q.
R1a = R1b=R1 R2d = R2q=R2
Lij определяется из (6)
Выражение (8), с учетом того, что ϕ= ∫ωdt уравнение удобнее в следующей
форме: |
dij +ω∑ij dLi, j |
(9) |
||
ui =ii Ri + ∑Li, j |
||||
2q |
|
2q |
|
|
j=1α |
dt |
j=1α |
dϕ |
|
Противо - эдс двигателя определяется по фомуле:
∑2q dL ei =ωj=1αij dϕi, j
Развиваемы электромагнитный момент можно определить по формулам:
M = 1 |
∂ ∑ii Ψi = 1 ∑ii ∂Ψi |
||||||||
|
|
|
|
2q |
|
|
2q |
|
|
2 |
∂ϕ |
i=1α |
|
2 i=1α ∂ϕ |
|||||
|
|
1 |
|
|
2q |
2q |
∂Li, j |
|
|
M = |
2 |
pï |
∑ij ∑ |
|
ij |
||||
∂ϕ |
|||||||||
|
|
|
|
j=1α |
j=1α |
|
|||
M = pï L12 (i1β i2d −i1α i2q ) cosϕýë −(i1β i2q +i1α i2d ) sin ϕýë
(11)
(12)
(13)
1.1.4.Механическая динамическая характеристика обобщенной двухполюсной машины.
Вывод:
1)обобщенная двухфазная модель полностью описывает электромеханические преобразования энергии. Ее математическое описание является общим для реальной машины;
2)рассмотрение математического описания обобщенной электрической машины дает представление о физическом преобразовании энергии т.к. в качестве независимых переменных используются действительные значения. Причем уравнения, описывающие математические процессы являются нелинейными, поэтому необходимо использовать методы линеаризации;
3)Уравнение (10) или (9) представляет уравнение электромеханической динамической характеристики. Причем, оно позволяет проследить электромеханическую связь благодаря которой, осуществляется саморегулирование, которое имеет место при питании от источника напряжения;
4)Т.к. ij в соответствии с электромеханической характеристикой зависит от ω, то момент, определяемы по выражению (12) или (13) зависит от скорости и зависимость M=f(ω) является механической динамической характеристикой;
Статические механические характеристики легко получаются из выражений
(9)и (12), если принять выражения производных равными нулю.
5)уравнение (8) совместно с (12) представляет собой математическое описание электромеханических процессов;
Выражения (16) обобщенные уравнения движения электропривода, позволяющие исследовать электромеханические переходные процессы разомкнутого электропривода и процессы преобразования энергии.
1.1.5. Особенность математической модели для явнополюсных машин
1.2. Координатные преобразования уравнений обобщенной машины
1.2.1. Схематичное представление модели в осях U,V
В рассмотренном математическом описании электромеханического преобразователя входят реальные переменные(токи, напряжения), что позволяет представить в явном виде физические процессы.
При решении многих задач значительное упрощение математического описания процессов электромеханического преобразования энергии достигается путем линейных преобразований исходной системы уравнений, при этом осуществляется замена действительных переменных новыми переменными при условии сохранения адекватности математического описания физическому объекту.
Целью преобразования всегда является то или иное упрощения исходного математического описания динамических процессов: устранение зависимости индуктивностей и взаимных индуктивностей обмоток от угла поворота ротора, возможность оперировать не синусоидально меняющимися переменными, а их амплитудами и т.п.
Произведем замену переменных в осях a, b, d, q новыми переменными в осях
U, V.
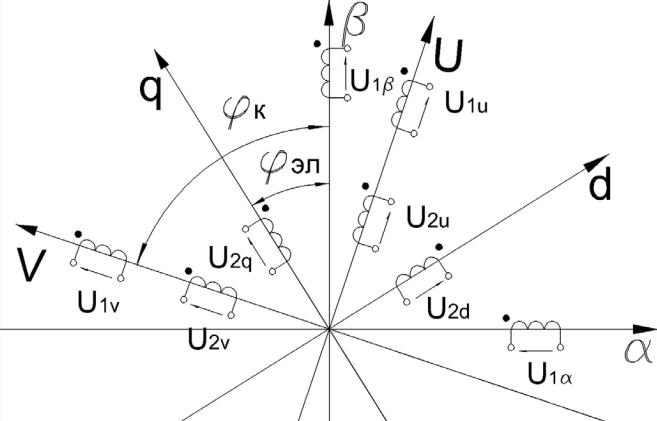
Рисунок 2
В системе координат U-V статор и ротор вращаются с одинаковой скоростью
 .
.
Электромеханический преобразователь в системе координат U, V должна создавать такое же магнитное поле, а также мгновенные мощности должны быть равны.

1.2.2. Уравнения преобразования координат
Рисунок 3
Рассмотрим проекции F1a, F1b на оси U, V. Для статора:
(21)
Для статора:
(22)
По аналогии можно записать уравнения преобразования координат для токов:
(23)
Уравнения преобразования координат для напряжения: