

Курсовойуу3 / ПЗ4
.doc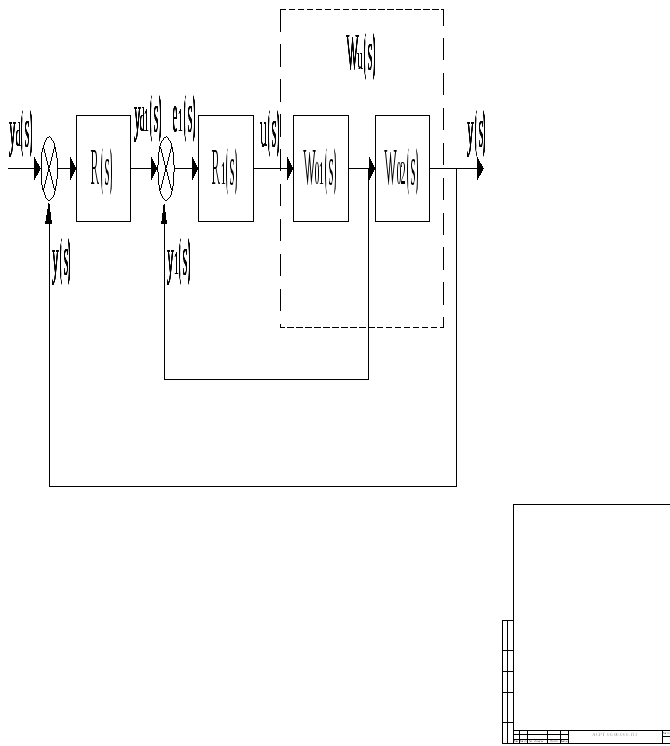
4 Структурно-параметрический синтез каскадной автоматической системы регулирования основной технологической переменной
4.1 Составление схемы структурной каскадной АСР, функциональной схемы каскадной АСР
Каскадные автоматические системы регулирования применяют для автоматизации технологических объектов управления, если существует вспомогательная технологическая переменная, однозначно связанная с основным выходом объекта.
В этом случае в систему каскадного регулирования, представленную на рисунке 4.1, включают два регулятора: основной (внешний) регулятор R(s), служащий для стабилизации основной технологической переменной - температуры y(s), вспомогательный (внутренний) регулятор R1(s), осуществляющий регулирование вспомогательной технологической переменной – расхода y1(s). Заданием yd1(s) для вспомогательного регулятора служит выходной сигнал основного регулятора уровня.
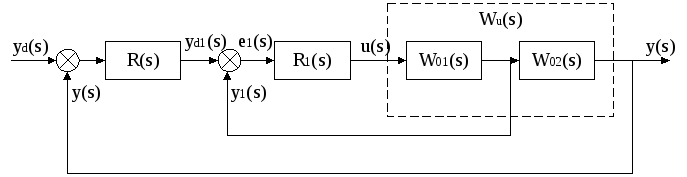
Рисунок 4.1 – Структурная схема каскадной автоматической системы регулирования
Где:
yd(s)=125(±2)˚C – сигнал задания основной технологической переменной (температуры);
yd1(s) – сигнал задания вспомогательной технологической переменной (расход мазута);
y(s) – текущее значения температуры;
y1(s) - текущее значения расхода;
ε1(s) – управляющий сигнал на регулятор;
U1(s) – управляющий сигнал на объект управления(печь);
y1(s) - текущее значения расхода;
R1(s)
– регулятор расхода,
![]() ;
;
R(s)
– регулятор температуры,
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
Функциональная схема каскадной автоматической системы регулирования температуры продукта на выходе печи представлена на рисунке 4.2.
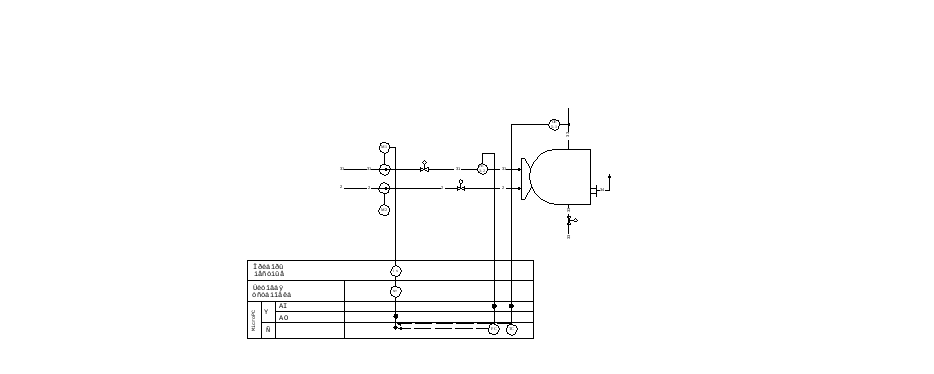
Рисунок 4.2 - Функциональная схема автоматизации каскадной автоматической системы регулирования температуры на выходе печи
4.2 Определение оптимальных настроек регуляторов.
Исходные данные для расчета выбираются согласно варианту индивидуального задания №17.
τu=2,8c, ku=30, Tu=28с – время запаздывания, коэффициент усиления и постоянная времени технологического объекта управления с передаточной функцией:
![]() .
.
τ01=1,6с, k01=25, T01=15c – время запаздывания, коэффициент усиления и постоянная времени технологического объекта управления с передаточной функцией:
![]() .
.
![]() – степень
колебательности.
– степень
колебательности.
Для
определения оптимальных настроек
основного ПИ – регулятора с передаточной
функцией
![]() воспользуемся выражением для передаточной
функции эквивалентного объекта
управления:
воспользуемся выражением для передаточной
функции эквивалентного объекта
управления:
![]() .
.
Определение
оптимальных настроек
![]() и
и
![]() проведем по методу РАФЧХ.
проведем по методу РАФЧХ.
РАФЧХ
эквивалентного объекта управления
WЭ(m,jw)
определяем, заменив в передаточной
функции WЭ(s)
s![]() -mw+jw.
-mw+jw.
![]()
 =
=![]()
![]()
где
![]() ,
,
![]() ,
,![]() ,
,![]() – модуль и аргумент числителя и
знаменателя РАФЧХ эквивалентного
объекта управления;
– модуль и аргумент числителя и
знаменателя РАФЧХ эквивалентного
объекта управления;
![]() ,
,
![]() – модуль и аргумент РАФЧХ эквивалентного
объекта управления;
– модуль и аргумент РАФЧХ эквивалентного
объекта управления;
![]() ,
,![]() – действительная и мнимая части РАФЧХ
эквивалентного объекта управления.
– действительная и мнимая части РАФЧХ
эквивалентного объекта управления.
Определим
РАФЧХ
![]() :
:
![]()
Выполним
преобразование
![]() по формуле Эйлера:
по формуле Эйлера:
![]()
Тогда подставляем и получаем:
![]()
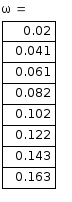
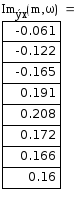
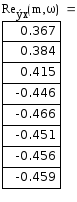
Выделяем мнимую и действительную части:
![]()
![]()
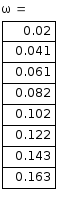
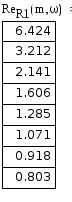
Задавшись
значениями
![]() ,
где
,
где
![]() ,
получаем:
,
получаем:
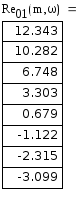
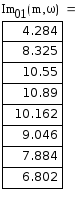

Определим
РАФЧХ
![]() :
:
![]()
Выполним
преобразование
![]() по формуле Эйлера:
по формуле Эйлера:
![]()
Тогда подставляем и получаем:
![]()
![]()
Выделяем мнимую и действительную части:
![]()
![]()
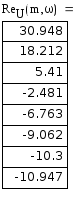

Определим
РАФЧХ
![]() :
:
Рассчитаем оптимальные настройки внутреннего вспомогательного ПИ-регулятора c передаточной функцией R1(s) по инженерной методике с помощью таблицы для апериодического переходного процесса[1]:
![]()
![]()
Выделяем мнимую и действительную части:
![]()
![]()


Настройки основного регулятора можно рассчитать по формулам:
![]()
![]() ,
,
Где:
![]()
![]()
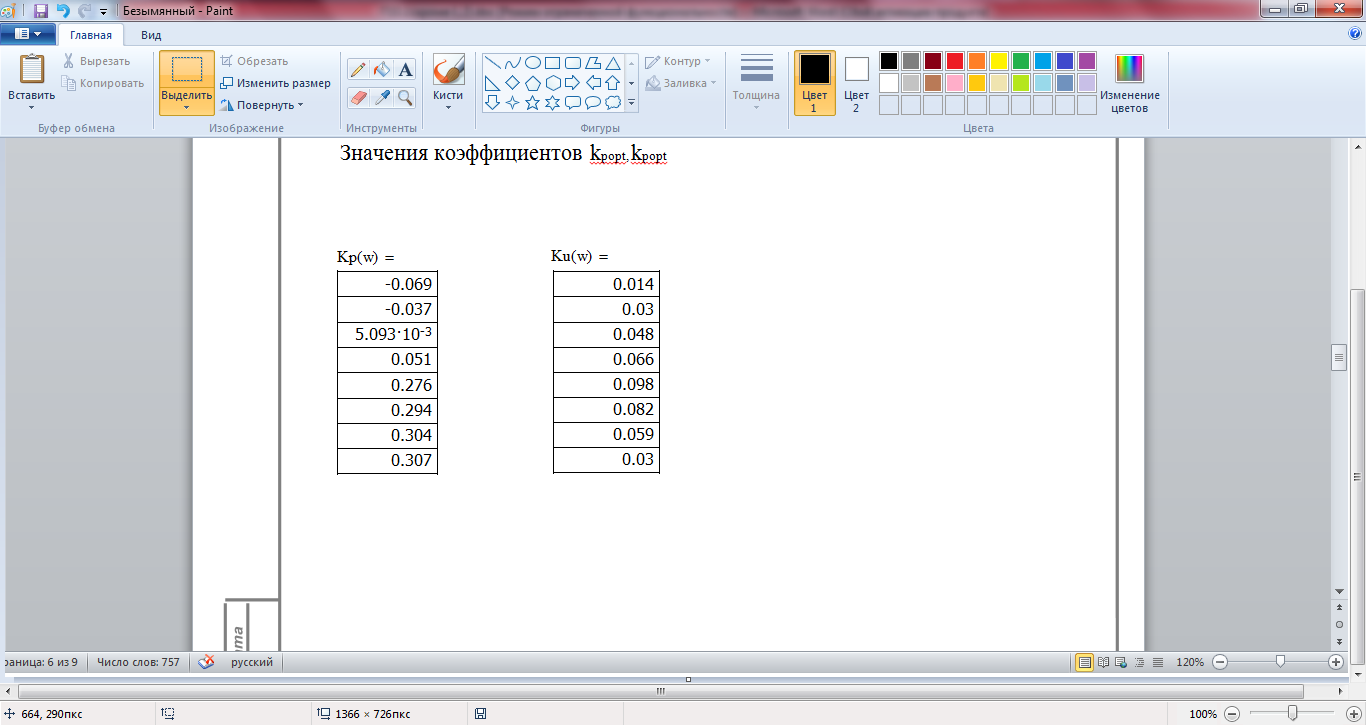
Строим график линии равного значения степени колебательности m ku(kР), при этом:
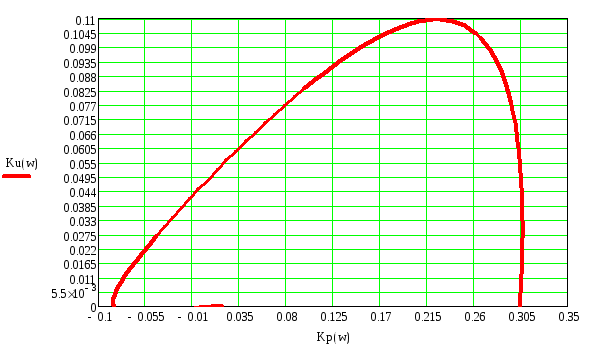
Рисунок 4.3 – График равного значения степени колебательности m
На рисунке 4.3 выбираем параметры Кuopt=0,082; Крopt=0,294 для настроек регулятора.
![]()
Тогда передаточная функция основного регулятора:
![]()
Цифровой регулятор формирует управляющее воздействие на каждом шаге регулирования uk с помощью рекурентных алгоритмов:
uk=uk-1+q0Δyk+q1Δyk-1,
где uk-1 - управляющее воздействие на предыдущим шаге регулирования;
Δyk, Δyk-1 – отклонение регулируемой переменной от задонного значения на данном шаге регулирования, предыдущем шаге регулирования.
q0, q1 – настройки цифрового регулятора.
Зная динамические параметры объекта управления, настройку ПИ-регулятора можно определить:
q0=Кр(1+ΔT/2KI), q1=-Кр(1-ΔT/2KI)
Где ΔT=T1uopt/10=1,2 – период дискретизации.
q0=0,225(1+1,2/2)=0,36
q1=-0,225(1-1,2/2)=-0,1
Отсюда получим уравнение управляющего воздействия:
uk=uk-1+0,36Δyk-0,1Δyk-1
4.3 Определение динамической характеристики основной технологической переменной
На рисунке 4.4 представлена математическая модель для исследования динамической характеристики основной технологической переменной y(t) в среде MATLAB.

Рисунок 4.4 – Математическая модель для исследования динамической характеристики y(t)
На рисунке 4.5 показан график переходного процесса с данными настройками.

Рисунок 4.5 – График переходного процесса температуры на выходе печи
Показатели качества системы регулирования:
- Трег = 95,0 с;
-
![]() .
.
4.4 Определение точности канала системы противоаварийной автоматической защиты (ПАЗ) и автоматической сигнализации (АС)
Для оценки точности каналов управления и защиты необходимо вычислить погрешность канала измерения:
![]() ;
;
где Si – погрешность элемента канала;
n – общее число элементов.
Отклонение от заданного значения определяется по формуле:
![]() ;
;
где N=140+30=170˚С – диапазон шкалы.
Для канала измерения вязкости вещества:
- погрешность модуля аналогового ввода - 0,1%;
- погрешность преобразователя – 0,1%;
- погрешность датчика температуры – 0,1%, тогда:
![]()
![]() ˚С
˚С
Расчет уставок ведется следующим образом:
TустmaxПАЗ= TmaxПАЗ-Δ=132-0,3=131
TустmaxАС= TmaxАС-Δ=130-0,3=129
Таким образом заданная граница срабатывания АС по максимальной температуре 130 ˚С . АС должна сработать при величине большей границы АС на величину абсолютной ошибки канала измерения. Принимаем уставку АС по уровню 129 ˚С.
Заданная граница срабатывания ПАЗ по температуре 132˚С. Принимаем уставку ПАЗ по максимальному температуре 131 ˚С.