

10.4. Оцінка точності зрівняних|урівнювати| значень невідомих геодезичних вимірів
Завершальною
процедурою зрівнювання геодезичних
вимірів параметричним способом, як це
відомо|показний|
із попереднього підрозділу, є оцінка
точності зрівняних|урівнювати|
значень невідомих. Розглянемо|розглядуватимемо|
цю процедуру детально. Як і в математичній
обробці однієї величини оцінюватимемо
точність декількох невідомих, тобто
визначимо їх середні квадратичні
похибки|
 . Розв’язання даної задачі має деякі
особливості, що полягають в тому, що
поправки
. Розв’язання даної задачі має деякі
особливості, що полягають в тому, що
поправки ,
,
 ,
, ,
…,
,
…, ,
– величини залежні. Причому математичному
аналізу піддається не одна функція, а
декілька.
,
– величини залежні. Причому математичному
аналізу піддається не одна функція, а
декілька.
Оскільки
величини
 ,
,
 ,…,
,…, (див. п.п. 10.1) виміряні|виміряти|
незалежно і рівноточно|,
їх середні квадратичні похибки|
дорівнюють
(див. п.п. 10.1) виміряні|виміряти|
незалежно і рівноточно|,
їх середні квадратичні похибки|
дорівнюють
 .
.
Відповідно
будуть рівні і їх ваги
 ,
а також середні квадратичні похибки
вимірівm
і середні квадратичні похибки одиниць
ваги μ,
,
а також середні квадратичні похибки
вимірівm
і середні квадратичні похибки одиниць
ваги μ,
 .
.
Звернемося
до рівняння (10.18), де елементи матриць Δ
і λ
є змінними, а елементами зворотної
матриці
 є
безперервні функції (10.10), що диференціюються,
і відповідно до основної теореми теорії
похибок (див. п.п.4.1) характеризуються
стандартами даних функцій. Тоді зворотна
матриця
є
безперервні функції (10.10), що диференціюються,
і відповідно до основної теореми теорії
похибок (див. п.п.4.1) характеризуються
стандартами даних функцій. Тоді зворотна
матриця
 може
бути представлена функціональним
визначником матриці Якобі (Якобіаном),
елементи якого, є часткові похідні.
може
бути представлена функціональним
визначником матриці Якобі (Якобіаном),
елементи якого, є часткові похідні.
Запишемо:
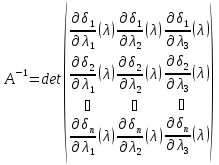 .
(10.19)
.
(10.19)
Підставимо отриману матрицю (10.19), а також матриці Δ і λ у вираз (10.18) і враховуючи властивості операцій над матрицями отримаємо наступне співвідношення:
 .
.
Спрощуючи отриману|одержувати| формулу матимемо:
 .
(10.20)
.
(10.20)
Отримана|одержувати|
і записана в матричному вигляді формула
для розрахунку середньої квадратичної
похибки|
сукупності поправок за умови рівноточних|
вимірів і незалежності поправок
 ,
,
 ,
, ,
…,
,
…, .
.
Для
обчислення точності зрівняних значень
невідомих у разі їх залежності виконаємо
наступні процедури. Враховуючи, що
матриця
 симетрична, замінимо в ній діагональні
елементи
на вагові коефіцієнти, величини яких
дорівнюють зворотним вагам невідомих
симетрична, замінимо в ній діагональні
елементи
на вагові коефіцієнти, величини яких
дорівнюють зворотним вагам невідомих
Відмітимо,
що діагональні елементи формованої
матриці Q
завжди
позитивні. Недіагональні елементи
 можуть бути як позитивними, так і
негативними. Вони є кореляційними
моментами, обумовленими залежністю
певних невідомих. Наприклад, елемент
можуть бути як позитивними, так і
негативними. Вони є кореляційними
моментами, обумовленими залежністю
певних невідомих. Наприклад, елемент і рівний йому елемент
і рівний йому елемент слід розглядати як кореляційний момент,
обумовлений залежністю величинx
і у,
тобто
слід розглядати як кореляційний момент,
обумовлений залежністю величинx
і у,
тобто
 .
.
Позитивне
значення
 свідчить про те, що збільшення або
зменшення похибки
свідчить про те, що збільшення або
зменшення похибки неминуче приводить до збільшення або
зменшення величини
неминуче приводить до збільшення або
зменшення величини .
І, навпаки, негативне значення
.
І, навпаки, негативне значення свідчить про те, що збільшення
свідчить про те, що збільшення тягне за собою зменшення
тягне за собою зменшення ,
а зменшення
,
а зменшення – збільшення
– збільшення .
.
Тоді
справедливо записати, що,
і
 .
У
розгорненому вигляді формула (10.20) набере
вигляду
.
У
розгорненому вигляді формула (10.20) набере
вигляду
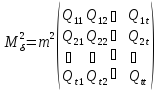 .
(10.21)
.
(10.21)
Звідси
витікає, що квадрат середньої квадратичної
похибки сукупності невідомих x,
у,
z,…,
t
є матрицею, яка отримана множенням
квадрата середньої квадратичної похибки
m
виміряних величин
 на матрицюQ.
на матрицюQ.
При обчисленні середніх квадратичних похибок невідомих x, у, z,…, t враховуватимемо, що ваги функцій результатів вимірів пов'язані із стандартом і стандартом одиниці ваги співвідношенням (6.8). Тоді справедливо записати наступні співвідношення:
 ,
,
 ,…,
,…, .
(10.22)
.
(10.22)
З
проведеного аналізу виходить, що хоча
величини
 виміряні рівноточно і незалежно,
отримані в результаті зрівнювання
значення незалежних величинx,
у,
z,…,
t
є нерівноточними і залежними величинами.
виміряні рівноточно і незалежно,
отримані в результаті зрівнювання
значення незалежних величинx,
у,
z,…,
t
є нерівноточними і залежними величинами.
Приклад|зразок| 10.1.
Якщо шуканими невідомими є координати x, y пунктів геодезичної мережі, то сукупна похибка положення пункту в даній системі координат відповідно до виразу (10.21) характеризується матрицею:
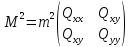 .
(10.23)
.
(10.23)
Отримана|одержувати| формула дає можливість|спроможність| розрахувати наступні точності| характеристики положення|становища| точки|точки| на площині|площині|:
Середні квадратичні похибки по осях координат
 і
і ,
обчислювані за формулами (10.22). Вони
залежать від вибору системи координат
(рис. 10.1).
,
обчислювані за формулами (10.22). Вони
залежать від вибору системи координат
(рис. 10.1).Кругову середню квадратичну похибку|, обчислювану за формулою:
 ,
(10.24)
,
(10.24)
яка знайшла широке застосування|вживання| в геодезичній практиці, при цьому виходячи з припущення|гадки|, що розсіювання вимірів по осях X і Y має однакову ймовірність.
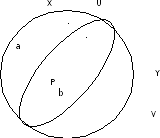
Рис. 10.1 – Ілюстрація для прикладу|приміром| 10.1
Еліпс похибок, орієнтація і розміри осей якого визначають найбільш вірогідні напрями|направлення| і величину максимальної і мінімальної середньої квадратичної похибки| положення геодезичного пункту.
Для визначення сукупної похибки положення геодезичного пункту скористаємося співвідношенням (10.23) і рис. 10.1, де показано, що поворотом осей навколо точки Р можна підібрати таку систему координат UV, при якій недіагональні елементи матриці Q дорівнюватимуть нулю і даний вираз матиме вигляд:
 .
(10.25)
.
(10.25)
Необхідний для такого перетворення кут|ріг| повороту осей обчислюється за формулою:
а
елементи
 на основі рівнянь:
на основі рівнянь:

 .
.
Велика і мала піввісь еліпса похибок будуть відповідно дорівнювати:
 ,
,
 .
(10.27)
.
(10.27)
Таким чином, детально розглянута|розглядувати| процедура (див. п.п.10.3 процедура 12) оцінювання точності зрівняних|урівнювати| значень невідомих. На прикладі|зразку| демонструється послідовність обчислення точнісних|підрахунку| |характеристик.