


где t0 – среднее время запаздывания, соответствующее λ = 0; τ – диапазон изменения времени запаздывания
Введем замену переменных |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
t* = t − tз = t − t0 |
− |
|
|
τ |
λ. |
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
||
С учетом этой замены можно записать |
|
|
|
|
|
|
|
|
|
|
|
|||||||||
∂S(λ,t) =U0 |
∂ψ |
∂t * |
= −U0 |
|
τ |
|
∂ψ |
. |
|
|
||||||||||
|
|
|
|
|
|
|||||||||||||||
∂λ |
|
|
∂t * ∂λ |
|
|
|
|
|
2 ∂t * |
|
|
|||||||||
Вычислим интеграл |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
I |
|
=U 2 |
|
|
τ 2 T0 |
∂ψ 2 |
dt . |
|
|
|||||||||||
ФИМ |
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
||||||||||||||
|
0 |
|
2 |
∫ |
∂t * |
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
Квадрат среднеквадратичной приведенной ошибки для ФИМ равен |
||||||||||||||||||||
δФИМ2 |
= |
|
|
|
|
|
Pош |
|
|
|
|
|
|
. |
|
(4.17) |
||||
|
|
|
|
|
2 T0 |
∂ψ 2 |
|
|
||||||||||||
|
|
2 |
|
|
|
|
|
|
|
|
||||||||||
|
|
|
2U0 ( |
|
τ) |
|
|
|
|
|
|
|
dt |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
∫ |
∂t * |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
Как видно из (4.17) ошибка тем меньше, чем больше временная девиация |
||||||||||||||||||||
импульса τ и чем больше значение интеграла. Величина |
∂ψ |
характеризует |
||||||||||||||||||
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∂t * |
|
скорость изменения направления на фронтах импульса. Для прямоугольного импульса производная была бы бесконечно велика и ошибка при слабых помехах равна нулю, но физически ясно, так как помеха не может сместить вертикальный фронт. Однако для передачи такого импульса нужна бесконечно широкая полоса, при которой уровень помех был бы бесконечно велик и наши формулы не верны.
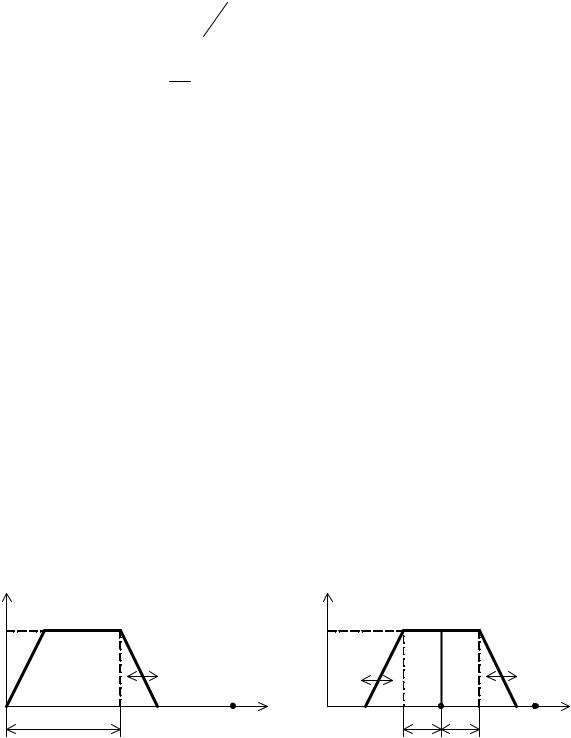
Рассмотрим один период сигнала ФИМ с трапецеидальным импульсом
(рис. 4.1).
S(λ, t) |
|
τu |
|
U0 |
τ3 |
τ3 +τu |
t |
|
|||
0 |
τф |
τф |
T |
Рис. 4.1. Сигнал ФИМ на одном периоде
112

т.е. (4.16). Определим ошибку для ШИМ путем сопоставления ШИМ и ФИМ. При вычислении интеграла
T0 |
∂S(λ, t) |
2 |
||
I = ∫ |
|
∂λ |
|
dt |
0 |
|
|
|
|
для ФИМ мы видели, что длина плоской части импульса не влияет на величину I. Интеграл целиком определяется крутизной фронта импульса, его длительностью и зависимостью времени запаздывания фронта от λ. Все эти параметры для заднего фронта ШИМ–I такие же, как и для заднего фронта ФИМ. Отличие состоит в том, что при ШИМ–I имеется только один фронт, который зависит от λ, а в ФИМ положение обоих фронтов зависит от λ.
Это приведет к тому, что в ШИМ–I |
∂S(λ, t) |
≠ 0 только в течение заднего |
|
∂λ |
|||
|
|
фронта. Поэтому значение I при одинаковых параметрах сигнала и зависимости (4.16) будет при ШИМ–I в 2 раза меньше. Значит, квадрат ошибки в 2 раза
больше, а ошибка в  2 раз больше, чем ФИМ. Таким образом,
2 раз больше, чем ФИМ. Таким образом,
δ2 |
= |
|
Pошτф |
. |
|
(4.19) |
|
|
|
||||||
ШИМ −Ι ср.кв |
|
2U мв2 |
τ2 |
|
|||
|
|
|
|||||
В случае двусторонней модуляции ШИМ–II оба фронта смещаются про- |
|||||||
порциально λ. Поэтому |
|
|
|
|
|
|
|
δ2 |
= |
Pошτф |
. |
(4.20) |
|||
|
|||||||
ШИМ −ΙΙ ср.кв |
|
|
4U мв2 |
τ2 |
|
||
|
|
|
|
||||
Отличие от ФИМ состоит в том, что временной сдвиг |
τ для каждого из |
||||||
фронтов может изменяться от 0 до T0/2, в то время как в ФИМ – от 0 до T0.
Сравнивая (4.19) и (4.20), видим, что ошибка при ШИМ–II в  2 раз больше, чем при ШИМ–I. Полученный результат кажется сначала противоречащим здравому смыслу, так как оказывается, что смещение двух фронтов менее выгодно, чем смещение одного фронта. Дело здесь в следующем. Использова-
2 раз больше, чем при ШИМ–I. Полученный результат кажется сначала противоречащим здравому смыслу, так как оказывается, что смещение двух фронтов менее выгодно, чем смещение одного фронта. Дело здесь в следующем. Использова-
ние двух фронтов уменьшает ошибку в  2 раз, но при двусторонней ШИМ девиация каждого фронта уменьшается в 2 раза, что увеличивает в 2 раза ошибку. Результирующий эффект – ошибка при переходе от ШИМ–I к ШИМ–
2 раз, но при двусторонней ШИМ девиация каждого фронта уменьшается в 2 раза, что увеличивает в 2 раза ошибку. Результирующий эффект – ошибка при переходе от ШИМ–I к ШИМ–
II возрастает в  2 раз.
2 раз.
114