

Лекция №11 синхронные микродвигатели с постоянными магнитами на роторе
В синхронных микродвигателях с постоянными магнитами наиболее распространенными являются роторы с радиальным (рис. 2.25, а) и аксиальным (рис. 2.25, б) расположением постоянных магнитов и короткозамкнутой обмотки.
Ротор состоит из двух основных частей:
а) постоянных магнитов 1, создающих магнитный поток возбуждения ротора и обеспечивающих возникновение электромагнитного момента в синхронном режиме;
б) короткозамкнутой обмотки типа «беличья клетка» 3, уложенной в сердечник 2 из электротехнической стали и обеспечивающей возникновение электромагнитного момента в процессе асинхронного пуска.
Электромагнитный момент создается в результате взаимодействия вращающегося поля статора с полем возбуждения ротора, которые вращаются с одинаковой угловой скоростью, равной угловой скорости ротора.
Электромагнитный момент синхронного микродвигателя в синхронном режиме в случае симметричной магнитной цепи и при незначительном активном сопротивлении обмотки статора определяется уравнением, известным из общей теории синхронных машин активного типа:
![]() , (2.29)
, (2.29)
где m1 – число фаз статора; U1 – фазное напряжение на зажимах обмотки статора; E0 – э.д.с, наводимая магнитным потоком ротора в обмотке фазы статора; ω1 = 2πf1/p – синхронная угловая скорость (f1 – частота напряжения питания; p – число пар полюсов машины); XC – синхронное индуктивное сопротивление обмотки статора; θu – сдвиг по фазе (во времени) между векторами U1 и E0.
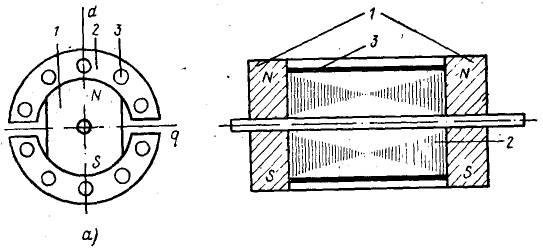
Рис. 2.25
Угол θu численно равен электрическому пространственному углу между результирующим вектором напряжения статора и поперечной осью q ротора. Результирующий вектор напряжения статора представляет собой пространственный вектор, проекциями которого на оси обмоток фаз статора являются мгновенные значения соответствующих фазных напряжений. Если принять, что активное сопротивление обмотки статора R1 = 0, то θu равен углу между осью полюсов ротора и результирующим магнитным потоком машины.
Угол θu в синхронном режиме зависит от момента сопротивления на валу двигателя. Угловая характеристика, соответствующая уравнению (2.29), изображена на рис. 2.26 (сплошная линия).
В реальных синхронных микродвигателях с постоянными магнитами магнитная система несимметрична: индуктивные сопротивления обмотки статора по продольной Xd и поперечной Xq осям машины не равны. Это наглядно выражено у микродвигателей радиальной конструкции (см. рис. 2.25, а), в которых магнитное сопротивление ротора по продольной оси d больше, чем по поперечной q, вследствие малой магнитной проницаемости материала постоянных магнитов 1 по сравнению с электротехнической сталью 2.
Активное сопротивление обмотки статора R1 синхронных микродвигателей в отличие от синхронных двигателей большой мощности соизмеримо с индуктивными сопротивлениями Xd и Xq. Поэтому существенная часть потребляемой мощности теряется на сопротивлении R1.
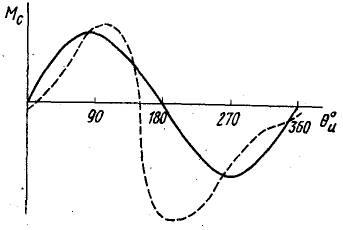
Рис. 2.26
Оба указанных фактора влияют на значение электромагнитного момента MC и характер его зависимости от угла θu. В синхронном микродвигателе активного типа основной является составляющая момента, соответствующая взаимодействию полей статора и ротора,

 (2.30)
(2.30)
при R1 = 0 выражение для момента Mосн обращается в (2.29). Появляется постоянная составляющая момента
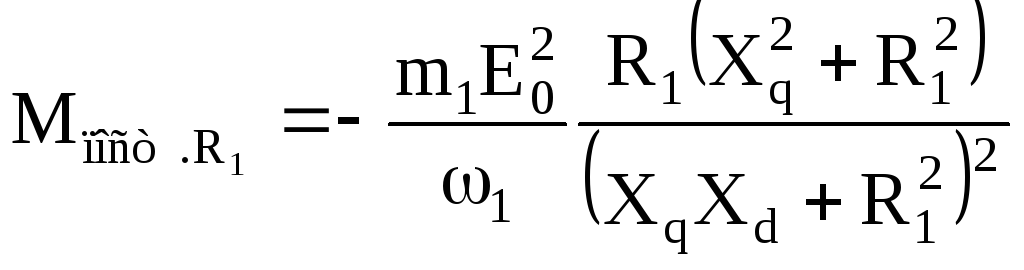 , (2.31)
, (2.31)
пропорциональная потерям мощности в обмотке статора от токов, наведенных в ней потоком ротора.
Неравенство индуктивных сопротивлений по продольной и поперечной осям вызывает появление постоянной
 , (2.32)
, (2.32)
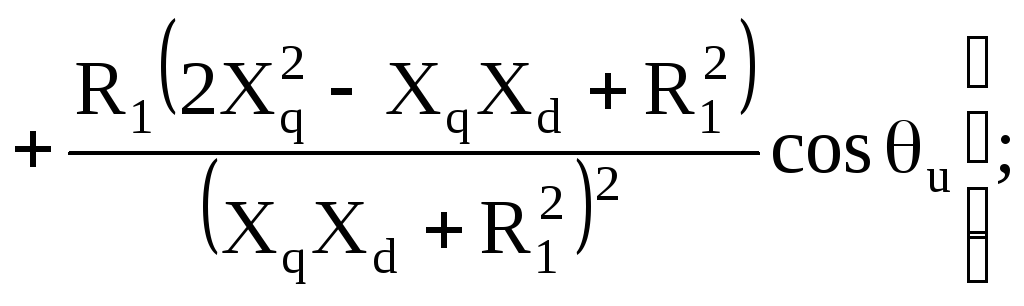
и переменной
 , (2.33)
, (2.33)
составляющих момента, получивших название реактивных. При Xq = Xd обе составляющие равны нулю.
Постоянные составляющие момента Мпост R1 и Мр.пост имеют знак минус, т. е. являются тормозными.
Результирующий электромагнитный момент синхронного микродвигателя с постоянными магнитами в общем случае представляет собой сумму всех этих составляющих:
![]() . (2.34)
. (2.34)
На рис. 2.26 изображена угловая характеристика синхронного микродвигателя радиальной конструкции (пунктирная линия), соответствующая уравнению (2.34).
Как видно из (2.30) и (2.31), увеличение магнитного потока ротора, а соответственно E0, приводит к росту как основной, так и тормозной составляющих момента. Это необходимо учитывать при выборе оптимальной степени возбуждения машины E0/U1.
В случае работы микродвигателей в системах синхронной связи часто требуется знать зависимость момента МC от угла γ между осью м.д.с. статора и продольной осью ротора. Следует отметить, что угловая характеристика MС = f(γэ) также является несинусоидальной, но при углах γэ = 0 и γэ = 180° момент MC = 0 (электрический угол γэ = pγ).
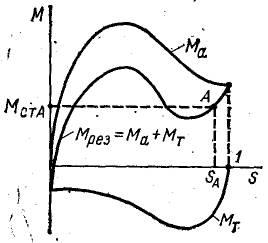
Рис. 2.27
У синхронных микродвигателей с постоянными магнитами применяют асинхронный метод пуска, т.е. в процессе разгона ротора до угловой скорости, близкой к синхронной, двигатель работает как асинхронный. Вращающееся магнитное поле статора во взаимодействии с токами, наведенными этим полем в короткозамкнутой обмотке ротора, создает асинхронный момент Ма, зависимость которого от скольжения s приведена на рис. 2.27. Особенность пуска таких микродвигателей по сравнению с двигателями с электромагнитным возбуждением заключается в том, что он происходит при наличии потока возбуждения ротора. Этот поток при вращении ротора наводит в обмотках статора э.д.с., частота которой не равна частоте напряжения питания. Под действием э.д.с. в цепи обмоток статора проходят токи, которые во взаимодействии с вызвавшим их потоком ротора создают тормозной момент Μт, направленный встречно к асинхронному вращающему моменту Ma. На результирующей характеристике Mpeз = f(s) появляются провалы, которые ухудшают условия пуска. Например, при моменте сопротивления на валу Мст А (рис. 2.27) ротор будет вращаться с угловой скоростью, соответствующей скольжению sA. Эта угловая скорость далека от синхронной, и синхронизация ротора с полем статора не наступит.
Следует отметить, что в синхронном режиме (s = 0) момент Мт является рассмотренной составляющей электромагнитного момента Mпост R1. Для уменьшения тормозного момента Mт необходимо снижать поток постоянных магнитов ротора, т. е. уменьшать отношение E0/U1.
Оптимальной является такая степень возбуждения двигателя, которая обеспечивает наилучшие характеристики в синхронном режиме при заданных пусковых характеристиках.