

8. Необходимое аналитическое условие геометрической неизменяемости. Анализ геометрической структуры. Кинематический анализ.
Возможны 3 случая:
1) W>0 система содержит недостаточное для геометрической неизменяемости количества связей, она является механизмом
2)W=0 система имеет минимально необходимое кол-во связей и при правильной их расстановке геометрически неизменяема и статически определима.
3)W<0 система содержит избыточное кол-во связей при правильной расстановке которых она геометрически неизменяема и статически неопределима. Т.о. необходимое аналитическое условие неизменяемости записывается в виде W<=0
Чтобы убедиться в правильности расстановки связи необходимо проанализировать способы соединения элементов учитывая принципы соединения двух и трех дисков.
Для сложных систем не всегда удается свести соединения стержней указанным принципом. Для них при произвольной нагрузке составляют определитель из внутренних усилий, если он равен 0, то система изменяема, если нет, то неизменяема.
Обычно при проведении кинематического анализа аналитический и геометрический совмещают:
1) проверим условие W<=0 и если оно выполняется, то проводят структурный анализ, руководствуются принципами соединения дисков:
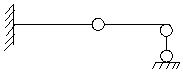 W=3Д-2Ш-С0
;
Д=2(Д1,
Д2);
Ш=1; С0=1+3=4;
W=3Д-2Ш-С0
;
Д=2(Д1,
Д2);
Ш=1; С0=1+3=4;
W=0
2)необходимое аналитическое условие неизменяемости выполняется

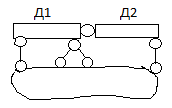
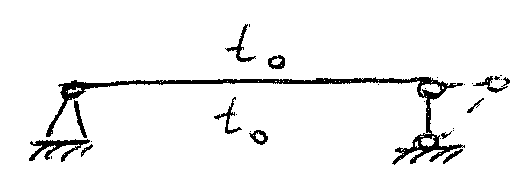
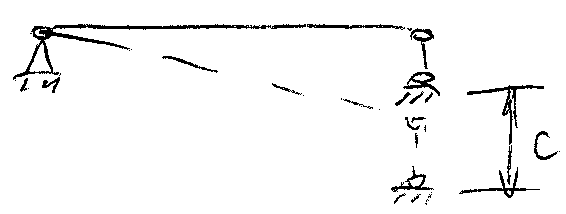
Диск Д1 присоединяется к земле жестко либо при помощи 3ех стержней не параллельных и не пересекающихся в одной точке, образуя диск Д1-земля. К нему присоединяется диск Д2 шарниром и стержнем не лежащим на одной прямой, следовательно балка геометрически не изменяема и т.к. W=0 статически определима.
9. Статическая определимость. Свойства статически определимых систем. Методы расчета стержневых систем на статическую нагрузку.
Необходимым и достаточным условием статической определимости системы является её мгновенная и геометрическая неизменяемость и отсутствие лишних связей. Заметим, что при расчетах по деформ. схеме все системы явл. Статически неопределимы. Внутрение усилия при выполнении всех гипотез определяются по недеформированной схеме, поэтому конструкция для которой W=0 статически-определима.
Св-ва:
1) Все связи статически определимых систем являются абсолютно неопределимыми. При удалении любой из них W>0 и конструкция становится изменяемой.
2) Каждой конкретной нагрузке соответствует определимые конечные внутренние усилия(св-во ед. решения). При отсутвии нагрузки усилии =0.
3) Самая уравновешенная нагрузка приложенная к локальной части конструкции вызывает усилие только в этой части.
4) Нагрузка приложенная к основной части конструкции дополнительно усилий не вызывает
5)Геометрические характеристики сечения, а также хар-ки упругих св-в в уравнения равновесия не входят и поэтому не влияют на значения внутренних усилий.
6)Температурные воздействия и смещение опор не вызывают появление внутренних усилий
Методы расчета:
1.Графический
2.Аналитеческий
1)статические
а)метод сечений б)метод замены связей
2)кинематический
3.Графо-аналитеческий
Метод сечений Конструкция разделяется на 2 части для которых составляются уравнения равновесия. суммаY=0, суммаZ=0, суммаМк=0
Метод замены связей Метод основан на принципе суперпозиций и применяется для ручного расчета сложных систем. Задается конструкция путем отбрасывания одних и введением других. Определяют усилия в новой системе и затем переходят в исходную. При этом системы уравнений равновесия получаются более простым. В настоящее время метод не актуален, т.к. возможные системы рассчитываются с помощью программных комплексов.
Кинематический метод Возможная работа силы определяется как её произведение на возможное перемещение по её направлению. Принцип возможных перемещений: А(е)+А(i)=0
А(е),А(i)-возможная работа внешних и внутренних сил.
Внешние силы совершают работу на перемещение точек их приложения, причем работа положительна, если направление и перемещение силы совпадают и наоборот. Внутренние силы совершают работу на деформациях. При определении внутренних сил мы будем вести расчеты по недеформированной схеме, следовательно А(i)=0. Поэтому формула преобразовывается А(е)=0
Чтобы найти некоторые усилия кинематическим методом необходимо:
1. удалить связь, реакция в которой определяется, превратив систему в механизм с одной степенью свободы.
2. механизму задть бесконечно малые возможные перемещения
3. приложить заданную нагрузку и не изменять усилие в отброшенной связи
4. Составить уравнение возможных работ из которого выразить искомое усилие.