

2.3. Универсальный метод решения линейных задач оптимизации
Графический метод решения ЗЛП целесообразно использовать только для задач с двумя переменными. В случае большего числа переменных используют универсальный метод решения ЗЛП – симплекс-метод.
В основе симплекс-метода лежит алгоритм симплексных преобразований системы линейных уравнений, дополненный правилом, которое обеспечивает переход к лучшему опорному плану.
Алгоритм симплекс-метода решения злп
Определение начального опорного плана ЗЛП.
Построение симплексной таблицы.
Проверка опорного плана на оптимальность с помощью оценок оптимальности. Если все оценки удовлетворяют условию оптимальности, то опорный план является оптимальным. Если хотя бы одна из оценок не удовлетворяет условию оптимальности, то переходят к новому опорному плану или устанавливают, что оптимального плана задача не имеет.
Переход к новому опорному плану задачи осуществляется путем определения генерального элемента и построением следующей симплексной таблицы.
Повторение действий, начиная с п.3.
Рассмотрим алгоритм симплекс-метода на примере.
Пример 2.3.1. Решить злп (2.2.1), (2.2.5) симплекс-методом.
Решение. Для решения ЗЛП необходимо, чтобы все свободные члены системы ограничений (2.2.1) были неотрицательными. Для этого первое неравенство системы умножим на (–1):
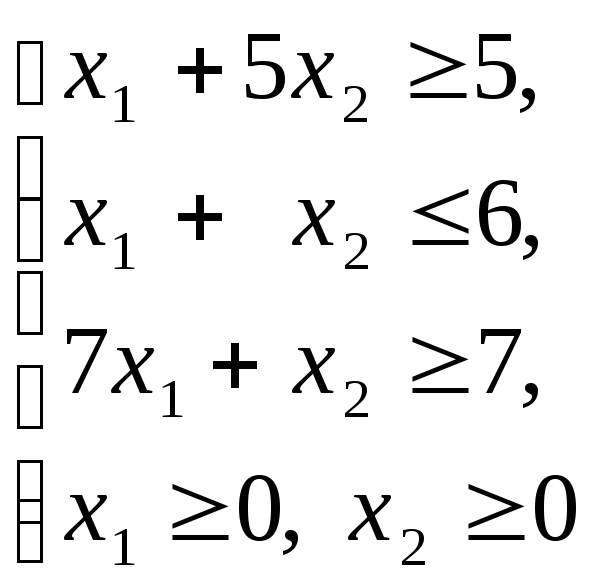 (2.3.1)
(2.3.1)
|
Замечание. |
Если требуется максимизировать целевую функцию, то удобнее перейти к нахождению минимума, используя соотношение max z= – min(–z). |
Перейдем к минимуму в нашей задаче:
min(–z) = –x1– 4x2
Приведем задачу к канонической форме, вводя дополнительные переменные x3,x4,x5в систему ограничений (2.3.1).
|
Замечание. |
Если неравенство имеет знак “ |
ЗЛП (2.3.1) в канонической форме имеет следующий вид:
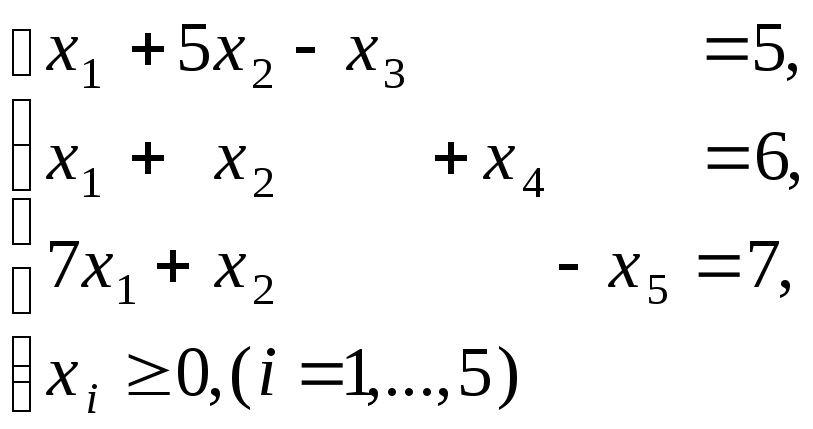
min(–z) = –x1– 4x2.
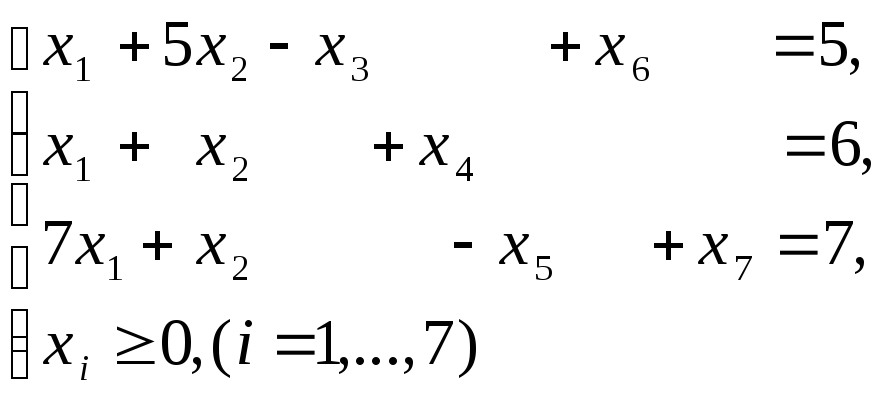
Для получения первоначального базиса используют векторы, образующие единичную матрицу. Если таких векторов недостаточно, вводят искусственные переменные в систему ограничений: если дополнительная переменная имеет знак минус, то в это уравнение вводят искусственную переменную со знаком плюс; если дополнительная переменная имеет знак плюс, то в это уравнение искусственную переменную вводить не нужно. Искусственные переменные одновременно вводятся в целевую функцию z с неизвестным положительным коэффициентом М.
 (2.2.2)
(2.2.2)
min(–z) = – x1 – 4x2 + Мx6 + Мx7.
В векторной форме система ограничений (2.2.2) имеет вид
р1x1+р2x2+р3x3 +р4x4 +р5x5 +р6x6 +р7x7 =р0,
где р1 =![]() ,р2 =
,р2 =![]() ,р3 =
,р3 =![]() ,р4 =
,р4 =![]() ,р5 =
,р5 =![]() ,р6 =
,р6 =![]() ,р7 =
,р7 =![]() ,р0 =
,р0 =![]()
Переменные x1иx2являются основными, x3,x4,x5 – дополнительными,x6,x7– искусственными. Векторыр6,р4,р7образуют единичный базис, причемр6– первый базисный вектор.
Заполним первую симплекс-таблицу. Исходная симплекс-таблица заполняется следующим образом. В первой строке записывают коэффициенты целевой функции. В столбец “Базис” записывают базисные векторы. В столбце “С” записывают коэффициенты целевой функции при базисных векторах. В столбцах “р0”, “р1”, “р2”, “р3”, “р4”, “р5”, “р6”, “р7” записывают компоненты соответствующих векторов.
Для заполнения клеток таблицы, которые находятся в двух последних строках, нужно элементы столбца “С” умножить на соответствующие элементы рассчитываемого столбца и отнять число, стоящее в первой строке (за исключением столбца “р0”). Например, для заполнения клеток столбца “р2” умножим элементы столбца “С” на соответствующие элементы столбца “р2” и отнимем число – 4:М·5 + 0·1 +М·1 – (– 4) = 4 + 6М. Коэффициент приМзаписывают в М-строку, число безМвносят вz–строку.
Таблица 2.3.1
Первая симплексная таблица
|
Базис |
С |
р0 |
– 1 |
– 4 |
0 |
0 |
0 |
М |
М |
С.О. |
|
р1 |
р2 |
р3 |
р4 |
р5 |
Р6 |
р7 | ||||
|
р6 |
М |
5 |
1 |
5 |
–1 |
0 |
0 |
1 |
0 |
5/1 |
|
р4 |
0 |
6 |
1 |
1 |
0 |
1 |
0 |
0 |
0 |
6/1 |
|
р7 |
М |
7 |
7 |
1 |
0 |
0 |
–1 |
0 |
1 |
7/7 |
|
z-строка |
0 |
1 |
4 |
0 |
0 |
0 |
0 |
0 |
| |
|
М-строка |
12 |
8 |
6 |
–1 |
0 |
–1 |
0 |
0 |
| |
Последние две строки симплекс-таблицы называются индексными. В них, начиная со второго столбца “р1”, содержатся оценки оптимальности, с помощью которых проверяют оптимальность опорного плана, соответствующего данной таблице. Значение составляющих опорного плана расположено в столбце “р0”, причем небазисным переменным присваивают нулевые значения.
Первой симплекс-таблице 2.3.1 соответствует опорный план:
x1= 0,x2= 0,x3 = 0,х4 = 6,x5 = 0,x6 = 5,x7 = 7.
Критерий оптимальности проверяют по М-строке, а если она отсутствует, то поz-строке.