

TауЦС_БФ_2013(2 семестр) / ЦСлекции / ЦСлекция06_07
.docЛекция 6, 7
Разомкнутые и замкнутые цифровые системы управления
1. Передаточная функция разомкнутой системы
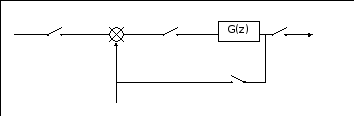
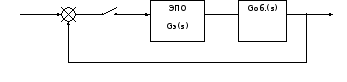
Рассмотрим дискретную разомкнутую систему, изображенную на рисунке
Объект
![]()
![]()






![]()
![]()
![]()
![]()
![]()

Рис. 1. Разомкнутая дискретная система
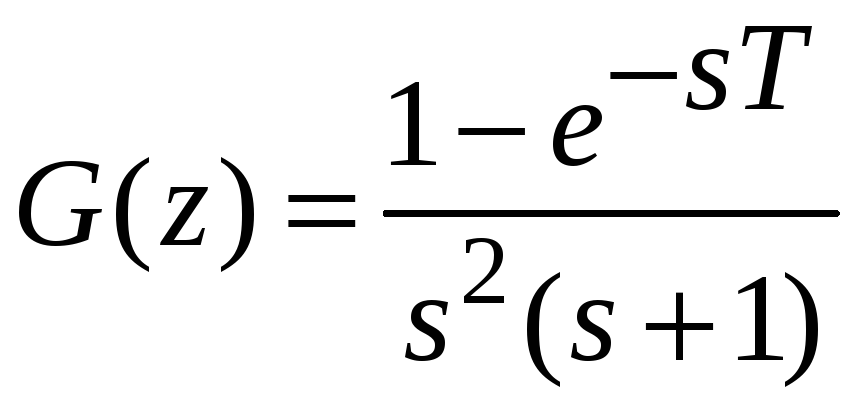
Передаточная функция представленной разомкнутой системы имеет вид
![]()
Найдем
![]() – преобразование для полученной
передаточной функции (непрерывной
системы). Для этого полученное выражение
– преобразование для полученной
передаточной функции (непрерывной
системы). Для этого полученное выражение

разложим на простейшие дроби
![]() .
.
Используя
таблицу соответствий между ![]() - преобразованием и преобразованием
Лапласа, получим
- преобразованием и преобразованием
Лапласа, получим
![]()
Положив
![]() секунде, получим
секунде, получим
 .
.
Реакцию
этой системы на единичный импульсный
сигнал можно найти, положив ![]() ,
так что
,
так что ![]() .
.
![]() мы можем получить путем деления числителя
на знаменатель
мы можем получить путем деления числителя
на знаменатель

![]()
![]()
![]()
получим
![]() .
.
Эти вычисления дают реакцию системы в моменты квантования и могут быть продолжены насколько это необходимо.
Из выражения
![]()
имеем
![]()
Заметим,
что ![]() соответствуют значениям
соответствуют значениям ![]() при
при ![]()
Мы
получили выражение для ![]() ,
т.е.
,
т.е. ![]() – преобразования выходного сигнала
системы в моменты квантования. Входной
сигнал имеет
– преобразования выходного сигнала
системы в моменты квантования. Входной
сигнал имеет ![]() – преобразование
– преобразование ![]() Поэтому можно определить передаточную
функцию системы в
Поэтому можно определить передаточную
функцию системы в ![]() - области как
- области как

Поскольку значения непрерывного входного сигнала берутся только в моменты квантования, то мы можем отразить этот факт, введя дополнительный (фиктивный) квантователь, см. рис. 2.
![]()











![]()
![]()
![]()
Рис. 2. Система с квантованием выходного сигнала.
При этом предполагается, что оба квантователя работают синхронно с одним и тем же периодом. Тогда очевидно, что
![]()
Это соотношение можно отобразить в виде одного блока, рис. 3.
![]()
![]()


![]()
Рис.3. Изображение дискретной передаточной функции в виде блока структурной схемы.
-
Передаточная функция замкнутой системы
В дальнейшем для простоті изложения будем рассматривать дискретную систему как цифровую, пренебригая погрешностью квантования по уроню
r(t) R(z) E(z) Y(z)
Y(z)
Рис. 4. ЦСУ с единичной обратной связью
Поскольку значения входного и выходного сигналов берутся в дискретные моменты времени, то систему можно изобразить в более простом виде
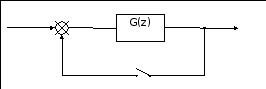
Рис. 5. ЦС с передаточной функцией совместно с экстраполятором нулевого порядка
![]() есть
z
– преобразование передаточной функции
есть
z
– преобразование передаточной функции
![]() представляющий объект совместно с
экстраполятором нулевого порядка.
представляющий объект совместно с
экстраполятором нулевого порядка.
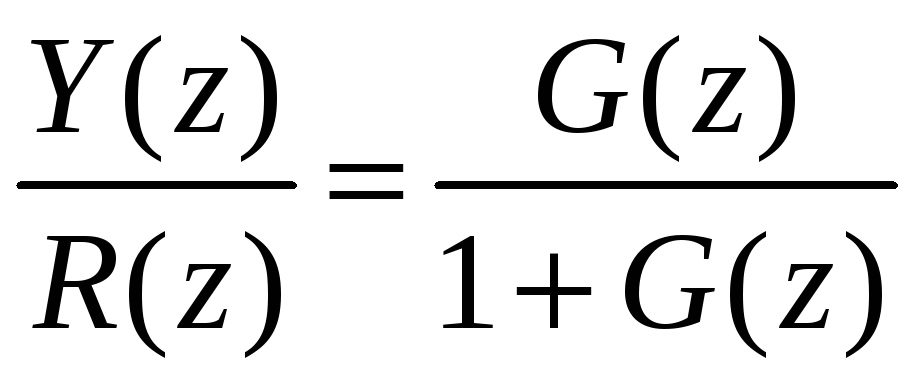
Передаточная
функция замкнутой системы
![]() будет иметь вид
будет иметь вид
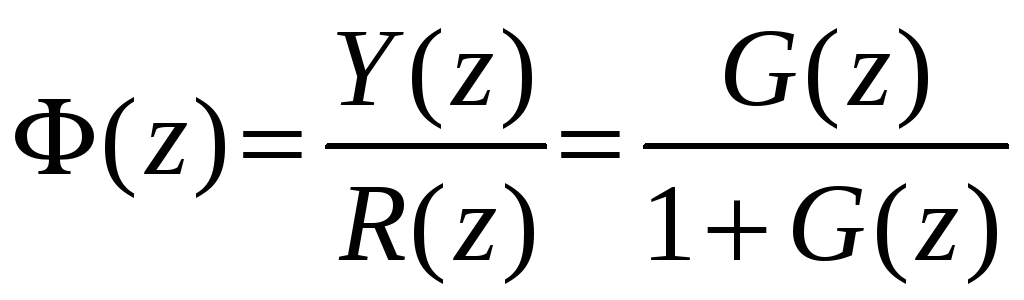 ,
(3)
,
(3)
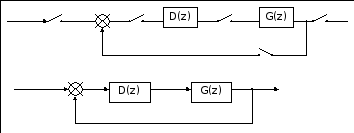
Модель системы с цифровым регулятором, в которой все сигналы представлены в виде своих z–преобразований представлена на рис. 3.
 r(t)
Y(z)
r(t)
Y(z)
R(z)
Y(z)
Рис. 3. Замки цифровой системы управления с цифровыми регуляторами
Такая замкнутая система имеет передаточную функцию
 , (4)
, (4)
3. Передаточная функция замки системы с непрерывной передаточной
функцией в цепи ОС.
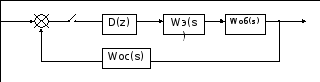
Рассмотрим САР содержащее цифровой регулятор в прямой цепи (ЭВМ)
 E(z)
ЭВМ экстраполятор
E(z)
ЭВМ экстраполятор
R(z) Y(s)
P(z)
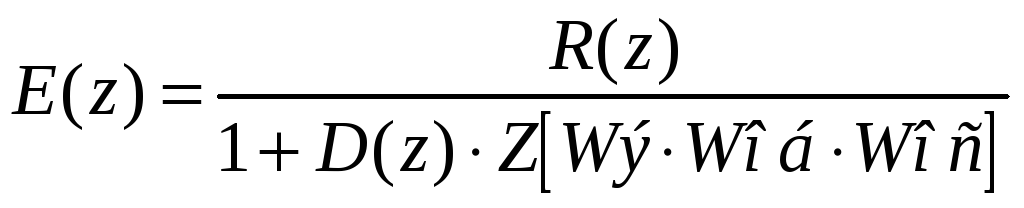
Определим
ошибку регулирования. Запишем
![]() -передаточную
функцию для ОС. Сигнал
-передаточную
функцию для ОС. Сигнал
![]() определится
определится
![]() , (5)
, (5)
![]() . (6)
. (6)
Из выражения (4) следует
![]() . (7)
. (7)
Решая
уравнение (5) относительно
![]() ,
получим
,
получим
 . (8)
. (8)
Выражение (8) передаточная функция ошибки регулирования.
Определим
значение выходного сигнала в
![]() -преобразовании.
-преобразовании.
![]() ,
,
а учитывая (8) получим значение передаточной функции замкнутой системы


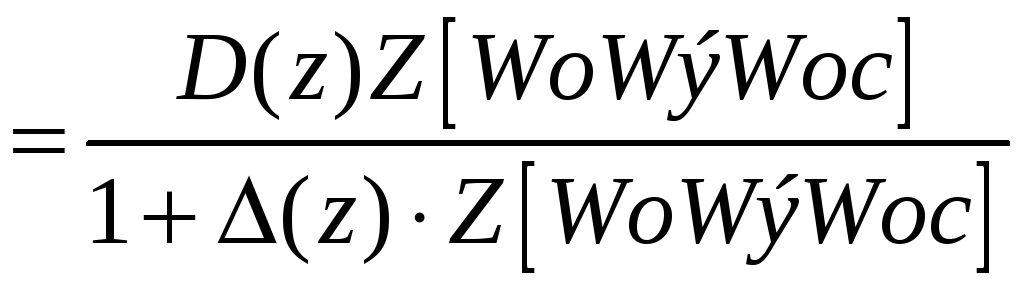 .
.
-
Определение реакции замкнутой системы
Реакцию замкнутой системы рассматрим для конкретного примера. В разомкнутом состоянии при Т=1 секунда система имеет передаточную функцию
или
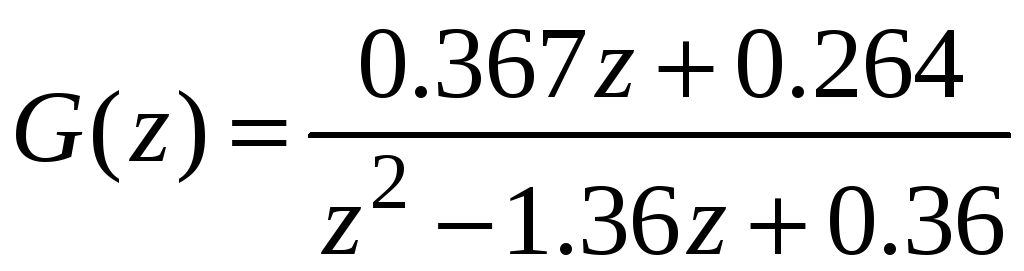 .
.
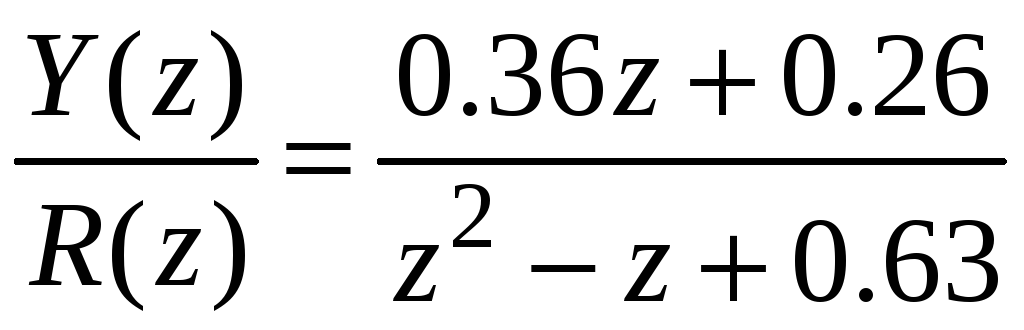
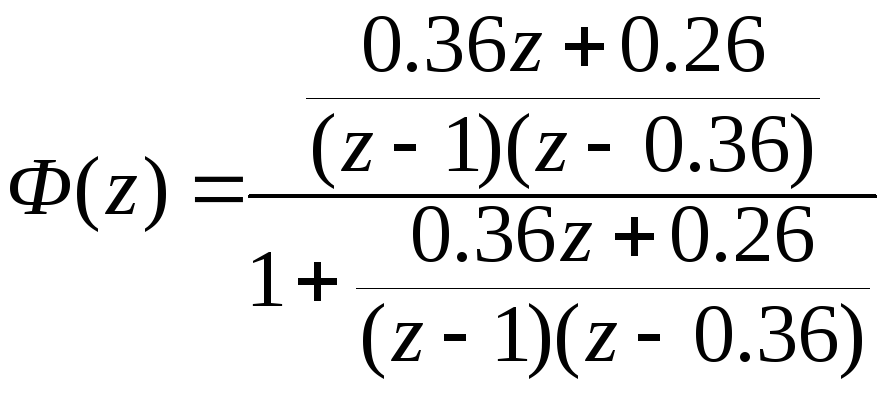
Для замкнутой системы
 .
.
Подставляя
в это выражение значение для
![]() ,
получим
,
получим
 .
.
Если входной сигнал задан в виде единичной ступеньки, тогда
![]()
и
![]() .
.
Выполнив деление числителя на знаменатель, получим
![]()
Построим график. В ЦС перерегулирование равно 45%, тогда как в непрерывной системе оно составляет 17%. В ЦС время установления в два роза больше, чем в непрерывной.

Рис.4. Сравнение переходных процессов непрерывной и цифровой
системы.
Пример.
Определим
передаточную функцию системы не
содержащей цифрового регулятора,
![]() ,
передаточная функция цепи обратной
связи также полагается равной 1,
передаточная функция объекта регулирования
,
передаточная функция цепи обратной
связи также полагается равной 1,
передаточная функция объекта регулирования
 ,
время квантования
,
время квантования
![]() ,
рис. 5
,
рис. 5
 Z(t)
e(t)
e*(t)
y(t)
Z(t)
e(t)
e*(t)
y(t)
Рис 5.
Передаточная функция замкнутой ЦС будет

В
качестве входного сигнала возьмем
![]()
![]() .
.
Найдем передаточную функцию прямой цепи

 .
.
Теперь
запишем
![]() -преобразование
выходного сигнала
-преобразование
выходного сигнала
 ,
,
Определив вначале передаточную функцию системы с обратной связью
 .
.
Имеем выходной сигнал
 .
.
Далее поступаем аналогично как в случае определения дискретных значений выходного сигнала для разомкнутой системы; делим числитель последнего выражения на знаменатель.