

То что может пригодится для курсового по ТММ(1й лист) / Пояснительная записка / 1 1 Пояснительная записка по ТММ
.doc1.Синтез, структурный и кинематический анализ рычажного механизма
1.1 Структурное исследование рычажного механизма.
Определим степень подвижности механизма.
Степенью подвижности называется число степеней свободы кинематической цепи относительно неподвижного звена и обозначается W.
Так как данный механизм является плоским, то для определения степени подвижности воспользуемся формулой Чебышева:
W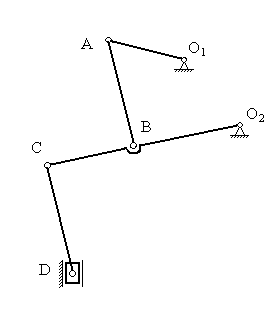 =3n-2Р5-Р4,
(1)
=3n-2Р5-Р4,
(1)
где n- число подвижных звеньев,
Р5- число кинематических пар
пятого класса,
Р4- число кинематических пар
четвертого класса.
Для данного механизма:
n= 5, Р5= 7, Р4= 0.
W=3n-2Р5-Р4 =3*5 – 2*7 – 0 = 1
Вывод: для обеспечения определенного движения всех звеньев данного механизма достаточно сообщить определенное движение одному звену, которое и будет входным.
Определим класс и порядок механизма.
Класс механизма определяется по наивысшему классу структурных групп, входящих в состав механизма.
Порядок механизма определяется по числу внешних кинематических пар.
Структурная группа – это кинематическая цепь, степень подвижности которой будет равна нулю, если свободные элементы внешних пар присоединить к стойке.
Структурная группа первого класса – первичный механизм.
Структурная группа второго класса – структурная группа, состоящая из двух звеньев и трех кинематических пар.
Структурная группа третьего класса и выше – определяется по числу внутренних кинематических пар, образующих наиболее сложный замкнутый контур.
Первичный механизм – двухзвенный механизм, состоящий их одного подвижного звена и стойки, соединенных между собой одноподвижной кинематической парой.
Порядок разложения механизма на структурные группы: определяем степень подвижности механизма и начинаем последовательно отделять структурные группы, начиная с наиболее удаленной от входного звена; при этом следим за тем, чтобы оставшийся механизм имел ту же степень подвижности, что и исходный. Каждое звено и каждую кинематическую пару можно взять только в одну структурную группу. После отделения всех структурных групп должен остаться первичный механизм.
Для определения класса и порядка механизма разложим его на структурные группы.
1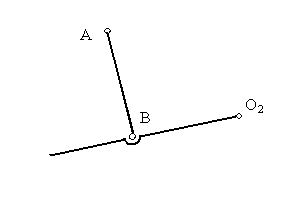 )
2)
3)
)
2)
3)
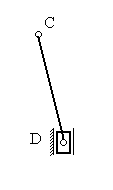

1-я структурная группа – второго класса второго порядка.
2-я структурная группа – второго класса второго порядка.
3 – первичный механизм.
Вывод: данный механизм является механизмом второго класса второго порядка.
1.2 Кинематический анализ рычажного механизма
a=50мм=0,05м,
b=370мм=0,37м,
c=25мм=0,025м,
lO1A =120 мм = 0,12 м,
lAB =360 мм =0,36 м,
lO2B=370 мм = 0,37 м,
lO2C=420 мм = 0,42 м,
lCD=750 мм = 0,75 м
ώO1A= 12 1/с
1.2.1 Построение планов положений механизма.
Изобразим схему механизма в масштабе
μl=0.005 м/мм.
За нулевое положение принимаем крайнее верхнее положение механизма. Положения всех звеньев механизма определяются по известным их размерам и координатам неподвижных точек и направляющих.
1.2.2 Построение планов скоростей.
Так как данный механизм является механизмом второго класса второго порядка то можно применить метод планов скоростей для кинематического анализа механизма. Рассмотрим первичный механизм, после чего структурный анализ проведем по структурным группам в том порядке, в каком структурные группы присоединяются к первичному механизму.
1.2.2.1 Определение скорости точки А.
Скорость точки А всегда перпендикулярна кривошипу О1А. Так как известна угловая скорость кривошипа и его длина, то скорость точки А может быть найдена по формуле:
VА=ώO1A* lO1A , (2)
где VА– абсолютная скорость точки А, м/с
ώO1A – угловая скорость кривошипа О1А, 1/с
lO1A – длина кривошипа О1А, м
VА= 12 * 0,12 = 1,44 м/с
Выберем на плоскости точку – мгновенный центр скоростей и обозначим ее буквой р. Проведем через эту точку прямую, перпендикулярную О1А. На ней отложим отрезок ра произвольной длины. Тогда масштабный коэффициент будет вычисляться по формуле:
 ,
(3)
,
(3)
где μv
масштабный коэффициент плана скоростей,
![]()
VA– скорость точки А, м/с
ра– длина отрезка на плане скоростей, мм
Возьмем ра = 96 мм, тогда
μv=1.44/96=0.015 м*с-1/мм
-
Определение скорости точки B.
VB = VA + VBA , (4)
где VB– абсолютная скорость точки В,
VА– абсолютная скорость точки А или скорость переносного движения,
VВА– скорость относительного движения точки В относительно точки А (направлена перпендикулярно звену АВ).
VB = VО2 + VBО2 , (5)
где VB – абсолютная скорость точки В,
VО2– абсолютная скорость точки О2 или скорость переносного движения (равна нулю, так как точка О2 неподвижна по условию),
VBО2– скорость относительного движения точки В относительно точки О2 (направлена перпендикулярно звену ВО2).
Графически решая уравнения (4) и (5) получим на плане скоростей точку b.
Для нулевого положения pb=0, VB= 0.
Для отклоненного положения pb=63, VB= 0,945 м*с-1/мм.
1.2.2.3 Определение скорости точки C.
Скорость точки С можно получить по теореме подобия.
Теорема подобия – изображение звена на плане скоростей и на плане ускорений должно быть подобно самому звену на плане механизма с тем же самым направлением обхода вершин.
pc/pb= lO2C/ lO2B => pc=pb* lO2C/ lO2B=pb*0.42/0.37= pb*1.135, (6)
где pc и pb – длины соответствующих отрезков на планах скоростей.
Для нулевого положения pc=0, VC= 0.
Для отклоненного положения pc=71.5, VC= 1,072 м*с-1/мм.
1.2.2.4 Определение скорости точки D.
VD = VC + VDC , (7)
где VD – абсолютная скорость точки D, параллельна оси Y(двигается по направляющим)
VC– абсолютная скорость точки C или скорость переносного движения
VDC– скорость относительного движения точки D относительно точки C (направлена перпендикулярно звену CD).
Графически решая уравнение (7) получим на плане скоростей точку d.
Для нулевого положения pd=0, VD= 0.
Для отклоненного положения pd=40, VD= 0,60 м*с-1/мм.