

Фізика(готові лабораторні роботи) / Новая папка / ЛР 1-06 !!!
.docЛабораторная работа № 1-06
ОПРЕДЕЛЕНИЕ МОМЕНТА ИНЕРЦИИ ТЕЛА
МЕТОДОМ КРУТИЛЬНЫХ КОЛЕБАНИЙ
Цель работы : определение момента инерции тела методом крутильных колебаний.
Приборы и принадлежности : трифилярный подвес , секундомер штангенциркуль , исследуемое тело.
Описание экспериментальной установки
и вывод рабочей формулы
Момент инерции тела является мерой его инертности при вращательном движении.
О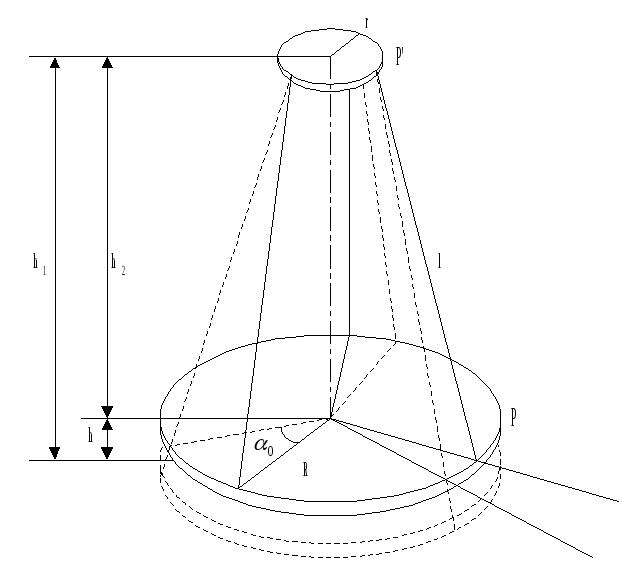 дним
из методов экспериментального определения
момента инерции твёрдого тела является
метод крутильных колебаний с использованием
трифилярного подвеса. Трифилярный
подвес представляет собой круглую
платформу Р,
подвешенную на трёх симметрично
расположенных нитях, закреплённых у
краёв платформы, как показано на рис.
6.1. Наверху эти нити также симметрично
закреплены на неподвижном диске Р’
несколько меньшего радиуса, чем радиус
платформы Р.
дним
из методов экспериментального определения
момента инерции твёрдого тела является
метод крутильных колебаний с использованием
трифилярного подвеса. Трифилярный
подвес представляет собой круглую
платформу Р,
подвешенную на трёх симметрично
расположенных нитях, закреплённых у
краёв платформы, как показано на рис.
6.1. Наверху эти нити также симметрично
закреплены на неподвижном диске Р’
несколько меньшего радиуса, чем радиус
платформы Р.
Рис. 6.1
Если повернуть нижнюю платформу Р вокруг вертикальной оси на небольшой угол, возникает момент сил, стремящийся вернуть её в положение равновесия. В результате платформа начнёт совершать гармонические крутильные колебания относительно вертикальной оси, перпендикулярной её плоскости и проходящей через её центр. Центр тяжести платформы при этом будет перемещаться вдоль оси вращения, периодически поднимаясь и опускаясь.
Если пренебречь трением, то на основании закона сохранения энергии для колеблющейся платформы можно написать следующее уравнение:
![]() (6.1)
(6.1)
где h – высота поднятия платформы; J – момент инерции платформы; ω – угловая скорость её вращения в нижней точке в момент прохождения ею положения равновесия.
Из формулы (6.1) можно найти момент инерции J. Для этого выразим h и ω через параметры установки: длину нити l , радиус платформ R и r (см. рис. 6.1), период колебания платформы Т.
При повороте нижней платформы на угол α0 её центр тяжести поднимется на высоту h=h1-h2 (см. рис. 6.1), где h1 – расстояние между нижней и верхней платформами в положении равновесия, h2 – расстояние между платформами после поворота на угол α0.
Представим h в виде :
![]() (6.2)
(6.2)
Из
рис. 6.1 видно, что
![]()
![]() Следовательно
Следовательно
![]() Так как
Так как
![]() ,
то
,
то
![]() Тогда
Тогда
![]() и из формулы (6.2) получим:
и из формулы (6.2) получим:
Вследствие
малости угла α0
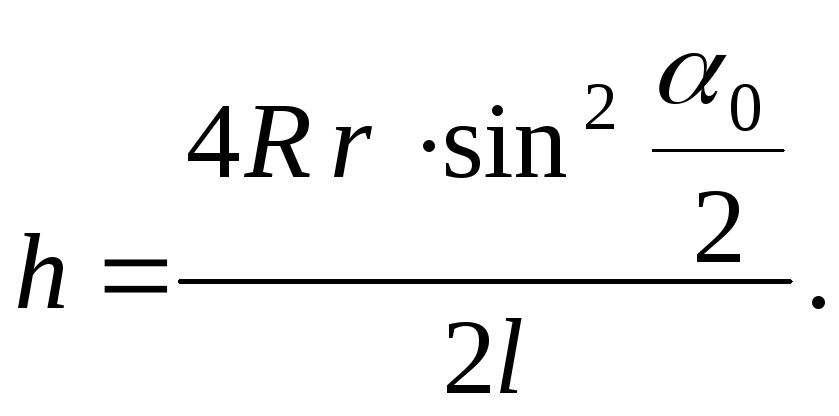
![]() и формула для h
принимает вид:
и формула для h
принимает вид:
![]() (6.3)
(6.3)
Зависимость угла поворота платформы от времени выражается формулой
![]()
где α0 – начальный угол поворота; Т – период крутильных колебаний платформы.
Угловая скорость при таком движении равна производной по времени от угла поворота:
![]() (6.4)
(6.4)
где
![]()
Подставляя h из формулы (6.3) и ωmax из формулы (6.4) в уравнение (6.1), получим выражение для момента инерции платформы:
![]() (6.5)
(6.5)
Для определения момента инерции тела воспользуемся свойством адаптивности момента инерции, которое состоит в том, что момент инерции системы тел относительно некоторой оси равен сумме моментов инерции каждого из тел относительно этой же оси.
Чтобы найти момент инерции тела, следует определить суммарный момент инерции платформы J , нагруженной телом, и момент инерции пустой платформы J0. Их разность и будет равна моменту инерции тела Jт:
![]() (6.6)
(6.6)
Порядок выполнения работы
-
Измерить штангенциркулем в нескольких местах толщину d нижней платформы и определить её среднее значение dср.
-
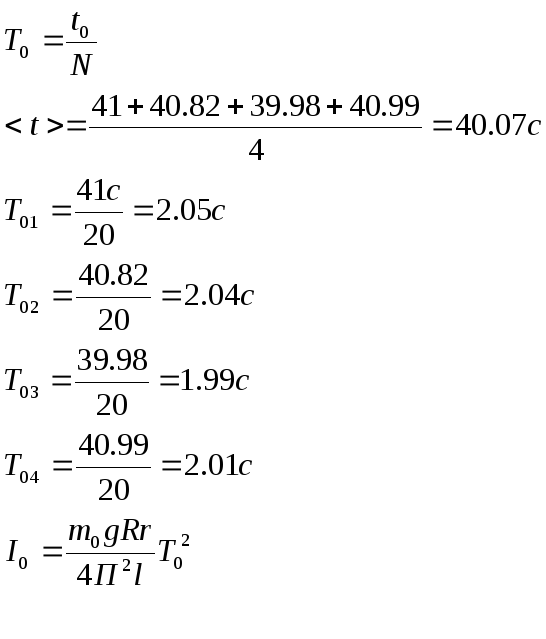
Повернуть платформу на небольшой угол (5-6) и отпустить её, с помощью секундомера измерить время t0 N её полных колебаний (
 ).
). -
Вычислить период колебаний:
-
Поместить в центр платформы исследуемое тело известной массы и определить период крутильных колебаний Т платформы с телом, повторив пп. 2 и 3.
-
Найти массу пустой платформы m0 по формуле
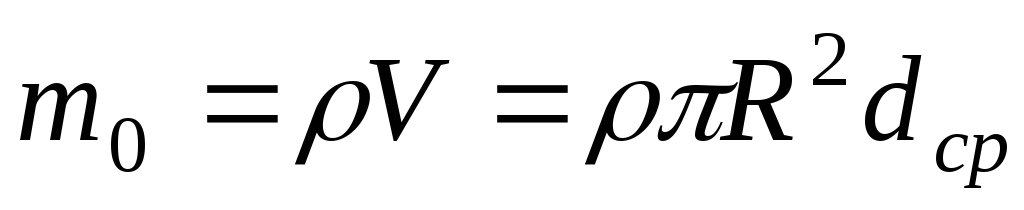 ,
где ρ
– плотность материала платформы
(указана на установке).
,
где ρ
– плотность материала платформы
(указана на установке). -
Результаты измерений и значения параметров, указанные на установке, занести в табл. 6.1.
-
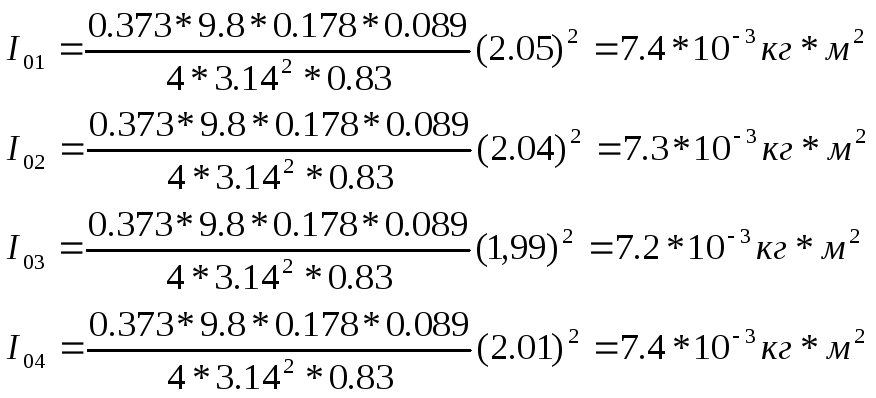
По формуле (6.5) вычислить момент инерции пустой платформы
![]()
-
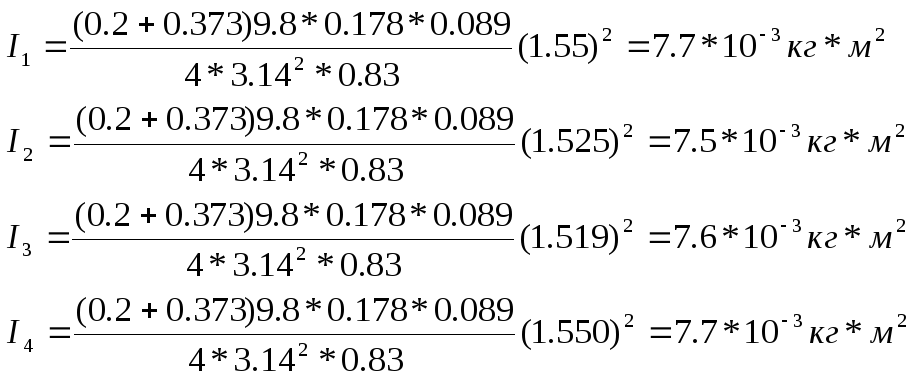
Вычислить момент инерции платформы с телом:
![]()
-
Найти момент инерции тела
 как разность моментов инерции нагруженной
и пустой платформ:
как разность моментов инерции нагруженной
и пустой платформ:
![]()
-
Найти относительную погрешность определения моментов инерции
 ,
воспользовавшись методом логарифмического
дифференцирования (см. разд. 1 настоящего
пособия).
,
воспользовавшись методом логарифмического
дифференцирования (см. разд. 1 настоящего
пособия). -
Проанализировать полученные результаты и сделать выводы.
Ход роботы:
Таблица 6.1
|
№ п/п |
dср, м |
Rср, м |
r, м |
l, м |
m0, кг |
N |
t0, c |
T0, c |
J0, кг·м2 |
t, c |
T, c |
J, кг·м2 |
JT, кг·м2 |
|
1 |
0,0012 |
0,178 |
0,089 |
0,083 |
0,373 |
20 |
41 |
2,05 |
7,4 |
31 |
1,550 |
7,7 |
0,3 |
|
2 |
0,0012 |
0,178 |
0,089 |
0,083 |
0,373 |
20 |
40,82 |
2,04 |
7,3 |
30,5 |
1,525 |
7,5 |
0,2 |
|
3 |
0,0012 |
0,178 |
0,089 |
0,083 |
0,373 |
20 |
39,98 |
1,99 |
7,2 |
30,38 |
1,519 |
7,6 |
0,4 |
|
4 |
0,0012 |
0,178 |
0,089 |
0,083 |
0,373 |
20 |
40,99 |
2,01 |
7,4 |
30,95 |
1,550 |
7,7 |
0,3 |
Вывод
: в этой
лабораторной роботе я научился определять
момент инерции тела методом крутильных
колебаний . Яполучил результат :
![]() .
Относительная
погрешность измерений
.
Относительная
погрешность измерений
![]() =2,3%
обусловляла наименние точных измерений
велечин радиуса шкива и времени .
=2,3%
обусловляла наименние точных измерений
велечин радиуса шкива и времени .