

Компьютиризированые сис.упр._Локтикова / 3. виб
.docx
3. Вибір та обґрунтування структурної схеми системи
3.1. Розробка структурної схеми всієї системи
Інформаційно-вимірювальна система реакторної установки складатиметься з нижнього й верхнього рівнів. Верхній рівень представлятиметься серверами (основною станцією і резервною), робочими місцями (РМ) оператора петель, старшого інжнера управління реактором, начальника зміни, технолога, головного інженера і підтримки архіву, індикаторним табло і розгалужувачами ArcNet і Ethernet.
Призначення нижнього рівня періодичне вимірювання вихідних сигналів датчиків і нормуючих перетворювачів, накопичення вимірювальної інформації, її первинна обробка і передача на верхній рівень системи. За типом джерел вхідних сигналів і діапазонами їх вимірювання доцільно організувати нижній рівень у вигляді трьох підсистем: підсистеми введення дискретних сигналів від датчиків з виходом типу «сухий» контакт (ПВДС), підсистеми введення аналогових сигналів системи управління (ПВАС) і підсистеми введення сигналів від датчиків температури (ПВСДТ).
ПВДС і ПВАС будуть двоканальними. ПВСДТ виконуватиметься одноканальною.
Контролери, які знаходяться в підсистемах нижнього рівня повинні представляти собою IBM PC сумісні промислові комп’ютери. Зв’язок з серверами може здійснюватися через послідовний інтерфейс RS-232 для ПВАС і ПВДС та RS-485для ПВСДТ, причому кожен контролер по першому послідовному каналу буде з’єднаний з основною станцією, а по другому – з резервною. Програмне забезпечення контролерів підсистем нижнього рівня повинне бути розроблене таким чином, щоб накопичена і оброблена інформація передавалась ти послідовним каналом, з якого відбувся запит на її передачу. Це дозволяє без додаткового обладнання підтримувати режим «гарячого» резервування серверів, тобто перенаправляти інформацію серверу, який знаходиться в «гарячому» резерві при виході з ладу основної станції і навпаки.
Алгоритм роботи підсистеми буде заключатися в неперервному циклічному опитуванні всіх датчиків і накопиченні даних в програмних регістрах-акумуляторах. При отриманні на будь-якому з послідовних каналів сигналу від сервера на передачу даних повинно відбуватися формування послідовності, що передається і власне передача її в активний послідовний канал.
Розгалужувачі локальних мереж (хаби) призначені для забезпечення зв’язку елементів верхнього рівня системи між собою через основну мережу ArcNet і резервну мережу Ethernet.
Сервери (основна станція і резервна) будуть складати ядро верхнього рівня та ІВС РУ. Вони призначені для введення даних від підсистем нижнього рівня, їх обробки в реальному часі, збереження історії, виконання необхідних обчислень, відображення в текстовому і графічному вигляді, а також надання даних підключеним через розгалужувачі робочим станціям. При штатній роботі основної станції (перший сервер) дані від підистем будуть надходити до неї через послідовні канали і передаватися через мережі в резервну станцію (другий сервер), яка буде постійно відслідковувати стан першого сервера. У випадку діагностування відмови першого сервера другий буде приймати керування на себе і надалі виконувати функції основної станції. Після усунення відмови перший сервер при ввімкненні буде виконувати функції резервної станції.
Робочі місця начальника зміни, старшого інженера керування реактором, оператора петель призначені для представлення інформації про перебіг технологічних процесів в РУ і його петлевих установках. Робоче місце технолога призначене для організації доступу до технологічної інформації.
Робоче місце головного інженера призначене для організації доступу до всієї технологічної інформації по реактору, включаючи дані про активну зону, контури, петлі та допоміжні підсистеми, як в режимі реального часу, так і в режимі перегляду архівів.
Робоче місце підтримки архіву призначене для ведення архіву про перебіг технологічного процесу, а також підготовки різноманітних звітів.
Індикаторне табло повинне підключатися до комп’ютера робочого місця старшого інженера керування реактором і призначене дял виведення технологічної інформації на щит управління.
Структурна схема системи матиме вигляд, представлений на рис. 3.1.
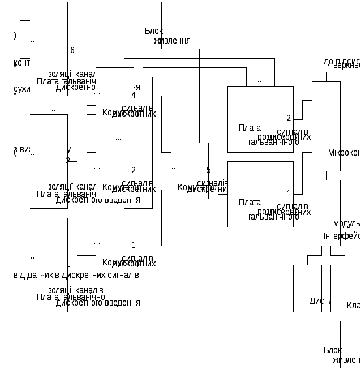
3.2. Розробка структурної схеми підсистеми введення дискретних сигналів
Основу підсистеми введення дискретних сигналів становитиме ІВМ РС сумісний мікроконтролер. До нього під’єднується індикаторна панель і клавіатура. Під’єднання здійснюватиметься за допомогою відповідного інтерфейсного модуля. Також до складу ПВДС повинні входити плати гальванічної ізоляції каналів дискретного введення, комутатори дискретних сигналів, плати гальванічного розділення дискретних сигналів та джерела живлення.
Вхідні дискретні сигнали від датчиків із виходом типу «сухий» контакт надходитимуть на входи плат гальванічної ізоляції. Виходи плат гальванічної ізоляції, каналів дискретного введення будуть під’єднуватися до виходів комутаторів дискретних сигналів, виходи яких, у свою чергу, повинні під’єднуватися до виходів плат гальванічного розділення. Гальванічно ізольовані сигнали з виходів останніх плат надходитимуть на виходи мікроконтролера для подальшої обробки. Мікроконтролер здатний здійснювати керування комутаторами дискретних сигналів, також після гальванічного розділення керуючих сигналів за допомогою відповідних плат. Крім того, мікроконтролер буде здійснювати функцію визначення станів датчиків з виходом типу «сухий» контакт шляхом безперервного послідовного опитування плат гальванічної ізоляції, взаємодії з оператором через клавіатуру та індикаторну панель і зв’язком з верхнім рівнем інформаційно-вимірювальної системи через послідовні порти по мірі надходження запитів на передачу.
Програмне забезпечення ПВДС повинне мати:
-
можливість введення дискретних сигналів;

Рис. 3.1
-
можливість обробки подій клавіатури;
-
можливість відображення інформації на індикаторі.
Підпрограма введення дискретних сигналів буде вирішувати настуні задачі:
-
керування комутаторами дискретних сигналів першого та другого рівнів комутації;
-
введення дискретних сигналів;
-
усунення «брязкоту» контактів;
-
передачу по запиту підготовлених пакетів даних на верхній рівень;
-
стробування сторожового таймера;
-
передачу пакета даних для відображення на індикаторі.
Підпрограма обробки подій клавіатури повинна здійснювати сканування стану клавіатури з визначеною частотою. Код натиснутої клавіші після обробки на «антибрязкотовому» фільтрі передається підпрограмі відображення на індикаторі для подальшої інтерпретації.
Підпрограма відображення на індикаторі буде ирішувати наступні задачі:
-
відображення стану вхідних сигналів для вибраної плати гальванічної ізоляції;
-
відображення контрольного символу;
-
відображення стану працездатності каналу ПВДС;
-
очистку індикатора.
Усі підпрограми розміщуватимуться у пам’яті мікроконтролера.
Тоді структурна схема підсистеми введення дискретних сигналів приймає вигляд як на рис. 3.2.
|
|
Рис. 3.2 |
3.3. Розробка структурної схеми підсистеми введення аналогових сигналів
Основу підсистеми введення аналогових сигналів становитиме ІВМ РС сумісний мікроконтролер. До нього під’єднується індикаторна панель і клавіатура. Під’єднання здійснюватиметься за допомогою відповідного інтерфейсного модуля. Також до складу ПВАС повинні входити фільтри нижніх частот (ФНЧ), комутатори аналогових сигналів, модулів введення аналогових сигналів, плата гальванічного розділення дискретних сигналів, плата еталонів і джерела живлення.
Вхідні аналогові сигнали від датчиків із виходами 0…5 мА, 0…5 В, 0…10 В. надходитимуть на входи фільтрів нижніх частот. Виходи ФНЧ будуть під’єднуватися до входів комутаторів аналогових сигналів 1-го рівня, виходи яких, у свою чергу, – до виходів комутаторів аналогових сигналів 2-го рівня. Виходи останніх комутаторів під’єднуватимуться до виходів модулів введення аналогових сигналів. Перетворені сигнали з виходів цих модулів надходитимуть на входи мікроконтролера для подальшої обробки.
Мікроконтролер буде здійснювати функції оцінки величини аналогових сигналів шляхом безперервного послідовного опитування, взаємодії з оператором через клавіатуру та індикатор і зв’язку з верхнім рівнем ІВС через послідовні порти по мірі надходження запитів на передачу.
Крім того, мікроконтролер буде здійснювати керування комутаторами аналогових сигналів після гальванічного розділення керуючих сигналів за допомогою відповідної плати.
Структурна схема підсистеми введення аналогових сигналів зображена на рис. 3.3.
|
|
Рис. 3.2 |

3.4. Розробка структурної схеми підсистеми введення сигналів від датчиків температури
Основу структурної схеми підсистеми введення сигналів від датчиків температури становитимуть ІВМ РС сумісні мікроконтролери. Також до складу ПВСДТ повинні входити модулі введення сигналів термометрів опору, модулі введення сигналів термопар, модулі аналогового введення, перетворювачі інтерфейсів і джерела живлення.
Вхідні сигнали від термоперетворювачів опору надходитимуть на входи модулів введення відповідних сигналів, а вхідні сигнали від термоелектричних перетворювачів – на входи модулів введення сигналів термопар. Виходи останніх модулів будуть під’єднуватися до входів модулів аналогового введення. Перетворені певним чином сигнали з виходів модулів введення сигналів термометрів опору та аналогового введення надходитимуть на входи мікроконтролерів для подальшої обробки. Перетворювачі інтерфейсів будуть потрібні для організації взаємодії із верхнім рівнем ІВС реакторної установки.
Структурна схема ПВСДТ зображена на рис. 3.4.
|
|
Рис. 3.4 |
