

ОЕМС_41,42 / ОЕМС_41,42 / ЗЕМС_ЛкНов / частотная селекция
.docТЕМА: «ЧАСТОТНАЯ СЕЛЕКЦИЯ»
Под частотной селекцией понимается выделение полезного сигнала из его смеси с помехой на основе различия их частотных характеристик.
Создание различия на несущих частотах достигается следующими методами: перестройкой по частоте, многочастотным излучением и многоканальным приемом, объединением устройств различного диапазона для решения одной задачи.
Сущность метода перестройки заключается в разделении спектров сигнала и помехи за счет перестройки несущей частоты сигнала. Этот метод применяется для защиты от прицельных и прицельно-заградительных помех типа несущей, хаотической и несинхронной импульсных помех, несущей, модулированной шумовым напряжением, и др.
В зависимости от назначения РЭС несущая частота может меняться: от группы к группе импульсов, причем изменение частоты происходит по заранее заданному, случайному или квазислучайному законам; от импульса к импульсу; в пределах длительности импульса; в пределах длительности каждого импульса относительно некоторой средней величины, которая, в свою очередь, изменяется в течение времени излучения всей последовательности либо в каждой группе импульсов, либо от импульса к импульсу.
Кроме решения задач помехоустойчивости, перестройка частоты затрудняет противнику ведение радиотехнической разведки, не дает возможности сосредоточить энергию помехи в узкой полосе частот, улучшает некоторые тактические характеристики РЭС. Так, перестройке частоты от импульса к импульсу увеличивается дальность обнаружения флюктуирующей цели [92], улучшается различимость цели на фоне морской поверхности и гидрометров, устраняется неоднозначность измерения дальности при высокой частоте повторения импульсов и т. п.
Улучшения тактических характеристик РЭС оказывает непосредственное влияние и на помехоустойчивость. В частности, перестройка частоты от импульса к импульсу позволяет повысить точность РЛС, работающей в режиме сопровождения цели, что объясняется уменьшением уровня амплитудных и угловых флюктуаций отраженного от цели сигнала при быстрой перестройке частоты вследствие усреднения по времени сигналов, принятых на разных частотах. Суммарная ошибка, обусловленная собственной погрешностью системы и воздействием помех, не должна превышать допустимой величины. Поэтому уменьшение собственной погрешности системы позволяет работать при большем уровне помех.
Перестройка частоты от импульса к импульсу является эффективным средством по улучшению различимости целей на фоне отражений от протяженных объектов. При перестройке частоты от импульса к импульсу статистические характеристики сигналов, отраженных от протяженных объектов, подобны белому шуму, а параметры сигналов, отраженных от целей, приближаются к параметрам регулярных сигналов [79]. Это обстоятельство, наряду с общим уменьшением мощности сигналов, отраженных от протяженных объектов, позволяет эффективно решать задачу увеличения отношения сигнал/помеха.
Защита от помех методом перестройки частоты будет эффективной при выполнении следующих условий:
- перестройка должна производиться либо при приеме помеховых сигналов, либо, независимо от последних, по случайному закону;
- переход с одной частоты на другую должен производиться скачкообразно;
- время излучения РЭС на каждой фиксированной частоте должно быть минимально, вплоть до величины, не превышающей длительности импульса (перестройка от импульса к импульсу);
- величина смещения
частоты
![]() при каждом цикле перестройки должна
быть случайной, но не меньше
при каждом цикле перестройки должна
быть случайной, но не меньше
![]()
где ![]() - ширина спектра помех;
- ширина спектра помех;
![]() - ошибка наведения передатчика прицельных
помех;
- ошибка наведения передатчика прицельных
помех;
![]() - нестабильность частоты передатчика
РЭС;
- нестабильность частоты передатчика
РЭС;
![]() - ошибка настройки приемника на частоту
передатчика;
- ошибка настройки приемника на частоту
передатчика;
![]() - полоса пропускания приемника;
- полоса пропускания приемника;
![]() - допплеровский сдвиг частоты.
- допплеровский сдвиг частоты.
При выборе величины
смещения частоты необходимо задаваться
максимально возможными значениями
![]() и
и
![]() .
Так как в современных станциях диапазон
перестройки достигает тысяч мегагерц
(в РЛС AN/APG-45A, AN/APG-75
.
Так как в современных станциях диапазон
перестройки достигает тысяч мегагерц
(в РЛС AN/APG-45A, AN/APG-75
![]() МГц), необходимо обеспечить работу
передатчика, приемника и антенно-фидерной
системы станции в широком диапазоне
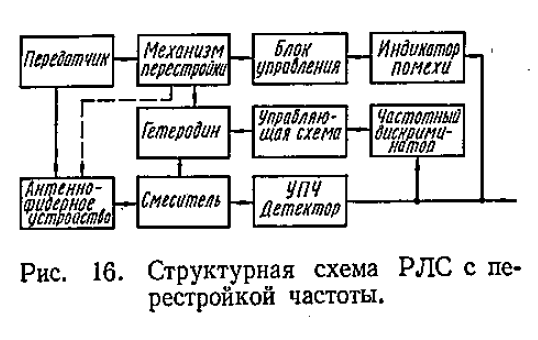
частот. Упрощенная структурная схема
приемо-передающей части перестраиваемой
РЛС изображена на рис. 16.
МГц), необходимо обеспечить работу
передатчика, приемника и антенно-фидерной
системы станции в широком диапазоне
частот. Упрощенная структурная схема
приемо-передающей части перестраиваемой
РЛС изображена на рис. 16.
При воздействии помехи на приемник РЛС приводится в действие механизм перестройки, который меняет частоту передатчика до тех пор, пока не произойдет полная отстройка от помехи. Для сопряжения приемного и передающего трактов служит схема автоматической подстройки частоты, включающая частотный дискриминатор и управляющую схему.
Несмотря на большие возможности и эффективность перестройки, этот метод защиты имеет определенные недостатки.
Во-первых, эффективность метода снижается, когда ширина спектра помехи соизмерима с диапазоном перестройки или при быстрой подстройке помехи на частоту сигнала.
Во-вторых, при перестройке затруднено или даже совсем исключено использование некоторых других мер защиты. Так, при перестройке станции от импульса к импульсу нельзя применять когерентно-импульсный метод защиты от пассивных помех.
В случае, если перестройка частоты не позволяет выйти за пределы ширины спектра помехи, то определяется спектральная плотность помехи, находятся участки частот с минимальной спектральной плотностью, в которых и осуществляется работа РЭС. Необходимый анализ спектра может быть осуществлен с помощью спектроанализатора.
В тех случаях, когда эффективность метода перестройки частоты недостаточна, целесообразно использовать РЭС, работающие с многочастотными сигналами. Помехоустойчивость РЭС с многочастотными сигналами объясняется широкой полосой сигнала и, как следствие, невозможностью станции помех обеспечить в этой полосе необходимое энергетическое превышение помехи над сигналом. Наряду с решением задач помехоустойчивости, многочастотное излучение используется и для других целей, в частности, для ликвидации «слепых» скоростей в РЛС с селекцией движущихся целей, распознавания, разведки и т. п.
Использование многочастотного сигнала позволяет улучшить характеристики РЕС:
повысить дальность
обнаружения при двухчастотном излучении;
для вероятности ложной тревоги
![]() и
превышения сигнала над шумом q=6…10
повышение дольности обнаружения
составляет 10-15% [89];
и
превышения сигнала над шумом q=6…10
повышение дольности обнаружения
составляет 10-15% [89];
повысить точность измерения угловых координат и величины доплеровского сдвига за счет уменьшения амплитудных и угловых флюктуаций сигналов, отраженных от цели [93];
снизить уровень излучаемой мощности; так, при вероятности обнаружения сложной цели порядка 0,9 двухчастотная РЛС позволяет в среднем уменьшить излучаемую мощность в 2 раза.
В зависимости от целевого назначения системы, видов и параметров помех возможны различные варианты комбинирования частот и функциональные преобразования принятых по каждому частотному каналу сигналов. Оценка трехчастотной РЛС по характеристикам обнаружения и помехоустойчивости для следующих вариантов обработки сигналов приведена в работе [73].
1. Суммирование выходных напряжений
![]()
2. Попарное суммирование напряжений с последующим перемножением сумм
![]()
3. Попарное перемножение напряжений с последующим суммированием
![]()
4. Перемножение всех выходных напряжений
![]()
Рассмотренные
варианты обработки можно реализовать
в структурной схеме (рис. 17, а). В этой
схеме операторы
![]() для
1-го и 4-го вариантов обработки
для
1-го и 4-го вариантов обработки

осуществляют
усиление соответственно сигналов
![]() для
2-го варианта – их попарное суммирование,
для 3-го – попарное перемножение. Оператор
Ф для 1-го и 3-го вариантов осуществляет
суммирование подаваемых на его вход
сигналов, 2-го и 4-го – их перемножение.
для
2-го варианта – их попарное суммирование,
для 3-го – попарное перемножение. Оператор
Ф для 1-го и 3-го вариантов осуществляет
суммирование подаваемых на его вход
сигналов, 2-го и 4-го – их перемножение.
Принимая вероятности
правильного обнаружения и ложной тревоги
во всех каналах одинаковыми, т. е.
![]() и
и
![]() ,
соответствующие вероятности на выходе
решающего устройства при многочастотном
приеме можно вычислить по следующей
формуле:
,
соответствующие вероятности на выходе
решающего устройства при многочастотном
приеме можно вычислить по следующей
формуле:
![]()
где m
– общее число независимых приемных
каналов в системе; n – число каналов, в
которых сигнал превышает порог;
![]() - вероятность правильного обнаружения
или ложной тревоги в одном канале.
- вероятность правильного обнаружения
или ложной тревоги в одном канале.
Для линейного суммирования сигналов частотных каналов приемника необходимым и достаточным условием правильного обнаружения и ложной тревоги является превышение порога сигналом хотя бы в одном канале:
![]()
![]()
Для 2-го и 3-го
вариантов обработки сигналов условием
для нахождения
![]() ,
,![]() является превышение порога сигналами,
по крайней мере, в двух каналах (неравенство
нулю хотя бы одного из слагаемых):
является превышение порога сигналами,
по крайней мере, в двух каналах (неравенство
нулю хотя бы одного из слагаемых):
![]()
![]()
При перемножении сигналов, так как необходимо превышение порога сигналами во всех трех каналах, соответствующие вероятности имеют вид
![]() ;
;![]() .
.
Первый вариант обработки характеризуется наибольшей вероятностью правильного обнаружения (или наибольшей дольностью действия при заданной вероятности правильного обнаружения) и наименьшей помехоустойчивостью (в данном случае более помехоустойчивой считается система, имеющая при прочих разных условиях меньшую вероятность ложной тревоги); 4-й вариант имеет наименьшую дальность действия, но наибольшую помехоустойчивость. Действительно, при 1-м варианте для подавления всей системы достаточно создать помехи только на одной из частот РЛС, при использовании 2-го и 3-го вариантов необходимо создать помехи не менее чем на двух частотах, а для 4-го варианта помехи должны быть на всех трех частотах. Вариант обработки сигналов в многочастотной РЛС выбирается в соответствии с ее назначением и ожидаемым противодействием.
Кроме одновременного использования сигналов, возможно применение логики автовыбора для подключения того частотного канала, который не поражен помехой (рис. 17, б).
Для выделения полезного сигнала на фоне перекрывающей его по частоте помехи применяется фильтрация сигнала, в основе которой лежит использование различий в частотных спектрах сигнала и помехи. Если указанное выделение осуществляется наилучшим образом с точки зрения того или иного критерия, то фильтрация считается оптимальной. Оптимальная фильтрация является частью статистической обработки сигнала, а структура оптимального фильтра может быть получена из известного выражения для минимального среднего риска [58].
В настоящее время теория оптимальной фильтрации рассматривает стационарные и нестационарные случайные процессы скалярных и векторных величин, оперирует с линейными и нелинейными системами с постоянными и переменными параметрами, учитывает требование конечной длительности времени наблюдения процесса [5, 64, 70]. Это позволяет выбрать структуру оптимального фильтра и осуществить его практическую реализацию при выделении полезных сигналов из смеси с помехами.
Если входной сигнал U(t), состоящий из полезного сигнала и помехи, и сигнал V(t), подлежащий выделению с помощью фильтра, являются стационарными и стационарно связанными случайными процессами, выражения для передаточной функции линейного оптимального фильтра, осуществляющего воспроизведение V(t) с минимальной среднеквадратической ошибкой в установившемся режиме, имеет вид
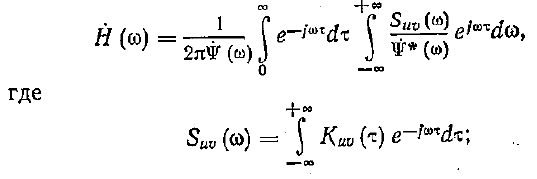
![]() - взаимная
корреляционная функция сигналов на
входе фильтра и на его входе;
- взаимная
корреляционная функция сигналов на
входе фильтра и на его входе;
![]()
![]() - автокорреляционная функция сигнала
на входе фильтра.
- автокорреляционная функция сигнала
на входе фильтра.
Все нули и полюсы
функции
![]() лежат в верхней полуплоскости комплексного
переменного
лежат в верхней полуплоскости комплексного
переменного
![]() ,
а нули и полюсы функции
,
а нули и полюсы функции
![]() ,
комплексно-сопряженной с
,
комплексно-сопряженной с
![]() ,
лежат в нижней полуплоскости.
,
лежат в нижней полуплоскости.
Структуру
оптимального фильтра обнаружения
сигнала известной формы можно найти из
условия максимизации отношения выходного
напряжения помехи в момент
![]() .
Для помехи с постоянной спектральной
плотностью
.
Для помехи с постоянной спектральной
плотностью
![]() в полосе фильтра отношение сигнала к
помехе на выходе фильтра
в полосе фильтра отношение сигнала к
помехе на выходе фильтра
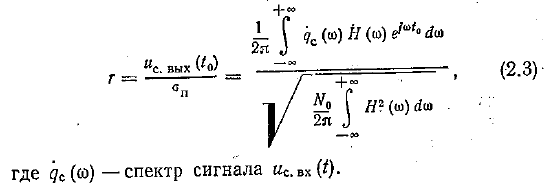
Решение уравнения (2.3) по максимизации r дает
![]()
где ![]() - функция, комплексно-сопряженная с
- функция, комплексно-сопряженная с
![]() ;
;
![]() - постоянный множитель.
- постоянный множитель.

Выражение (2.4) можно вывести и из более общих положений – условия максимизации функции правдоподобия.
Итак, частотная
характеристика
![]() оптимального фильтра обнаружения при
воздействии помехи с постоянной
спектральной плотностью совпадает (с
точностью до постоянного множителя) с
амплитудным спектром
оптимального фильтра обнаружения при
воздействии помехи с постоянной
спектральной плотностью совпадает (с
точностью до постоянного множителя) с
амплитудным спектром
![]() сигнала. Поэтому такой оптимальный
фильтр часто называют согласованным
(с сигналом) фильтром.
сигнала. Поэтому такой оптимальный
фильтр часто называют согласованным
(с сигналом) фильтром.
Эффективность
использования оптимального согласованного
фильтра можно рассмотреть на примере
выделения периодической последовательности
импульсов на фоне непрерывной шумовой
помехи, ширина спектра
![]() которой равна полосе пропускания
приемника (рис. 18, а). В соответствии с
«гребенчатой» формой энергетического
спектра сигнала
которой равна полосе пропускания
приемника (рис. 18, а). В соответствии с
«гребенчатой» формой энергетического
спектра сигнала
![]() частотная характеристика согласованного
фильтра также имеет приближенно
оценивается уменьшением суммарной
полосы прозрачности всех зубьев
гребенчатого фильтра по сравнению с
полосой пропускания обычного приемника
[73]:
частотная характеристика согласованного
фильтра также имеет приближенно
оценивается уменьшением суммарной
полосы прозрачности всех зубьев
гребенчатого фильтра по сравнению с
полосой пропускания обычного приемника
[73]:

где N
– количество принимаемых импульсов;
![]() ;
;
![]() - ширина полосы пропускания каждого
«зуба» гребенки, равная
- ширина полосы пропускания каждого
«зуба» гребенки, равная
![]() ;
;
![]() - число «зубьев», равное
- число «зубьев», равное
![]() ;
;
![]() - период, следования импульсов.
- период, следования импульсов.
Помехи типа несущей, модулированные узкополосным сигналом, импульсные помехи могут иметь ширину спектра, меньшую, чем ширина спектра полезного сигнала. Для подавления таких помех применяются узкополосные фильтры, «вырезающие» из общей полосы частот сигнала составляющие, соответствующие спектру помехи. Техническая реализация этого метода может быть осуществлена применением схем (см. рис. 5). Если же спектральная плотность помехи не превышает заданного порового уровня, то такая помеха не приведет к существенному снижению эффективности РЭС, так как энергия помехи в силу ее узкополосности будет мала по сравнению с энергией полезного сигнала.
Применение методов оптимальной фильтрации при сложных спектрах сигнала и помехи наталкивается на ряд трудностей. В некоторых случаях для выделения сигнала на фоне помехи можно использовать специфические особенности их спектров: несимметричность спектра сигнала относительно средней частоты спектра помехи, характер распределения спектра по оси частот и т. д. Используя эти особенности, можно полностью или частично компенсировать помеху.
Один из возможных методов борьбы с мощной амплитудно-модулированной помехой заключается в следующем [84]. Передается амплитудно-манипулированный сигнал, на который воздействует мощная амплитудно-модулированная помеха вида
![]()
где A(t) – случайный
процесс с ограниченной частотой
![]() спектра.
спектра.
В основу выделения сигнала положено использование свойства симметрии спектра АМ колебания относительно

несущей частоты и несовпадение несущих частот сигнала и помехи (рис. 19,а).
Частотные
характеристики фильтров
![]() и
и
![]() представлены на рис. 19,б. Если спектр
полезного сигнала
представлены на рис. 19,б. Если спектр
полезного сигнала
![]() попадает в полосу пропускания одного
фильтра, а помеха принимается обоими
фильтрами, в вычитающем устройстве
(рис. 19,в) происходит компенсация помехи.
попадает в полосу пропускания одного
фильтра, а помеха принимается обоими
фильтрами, в вычитающем устройстве
(рис. 19,в) происходит компенсация помехи.
Если же спектр
полезного сигнала
![]() попадает в полосу обоих фильтров, наряду
с компенсацией помехи, происходит
частичное ослабление полезного сигнала.
попадает в полосу обоих фильтров, наряду
с компенсацией помехи, происходит
частичное ослабление полезного сигнала.
Рассмотренная схема является разновидностью схем компенсации помехи, использующей основной (настроенный на частоту сигнала) и вспомогательный приемные каналы. Следует заметить, что в указанных схемах при отсутствии помехи отношение сигнал/шум уменьшается по сравнению с одноканальным приемником вследствие суммирования внутренних шумов обоих приемных каналов.