

САПР / lab4
.docЛабораторна робота №5.
Тема. Визначення спостережності та керованості систем з допомогою програмного пакету метематичного моделювання MatLab.
Теоретичні відомості.
Робота в середовищі MatLab із матрицями, серед елементів яких є символьні включає:
а) Опис символьних величин командою syms. Наприклад:
syms a b c;
б) Задання символьної функції командою sym:
v=sym(' функція ');
в) Розв'язок алгебраїчного рівняння командою
p=solve(символьна функція , шукана змінна).
Умови спостережності систем:
![]() ;
;
![]() .
.
Умови керованості систем:
![]() ;
;
![]() .
.
Завдання.
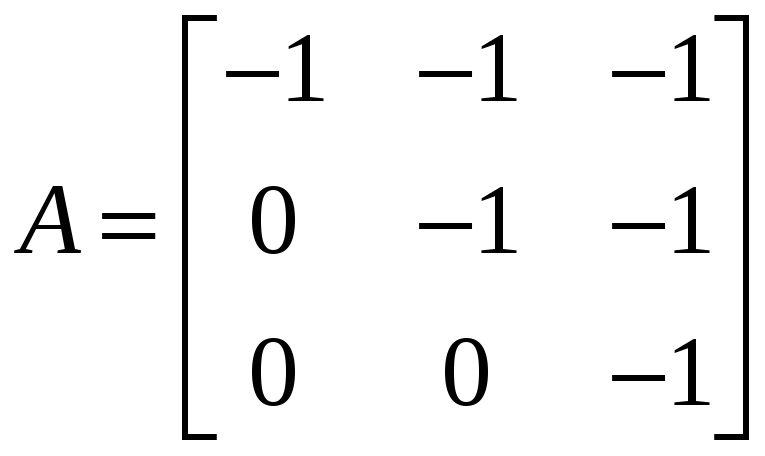
1)
Визначити при яких
![]() система спостережна
система спостережна
 ,
,
 .
.
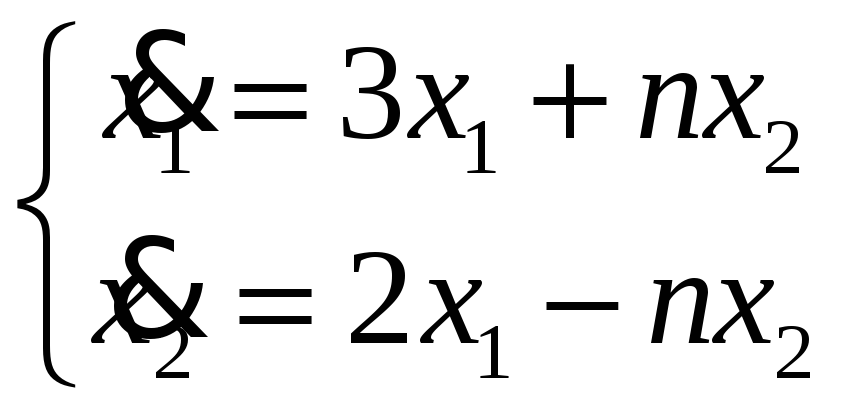
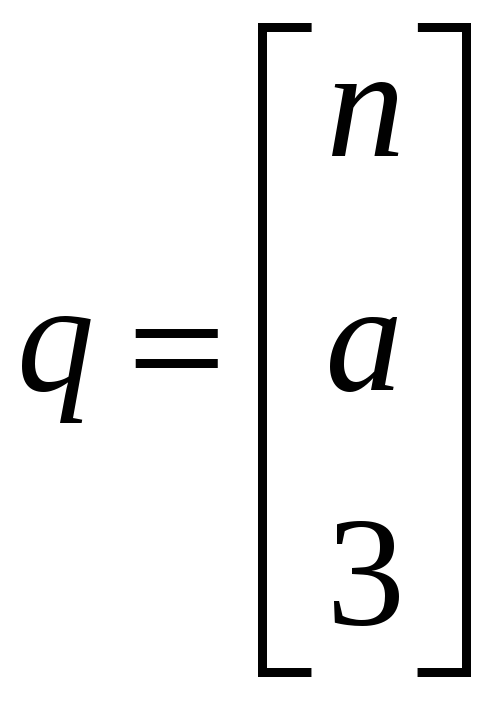
2)
Визначити при якому значенні
![]() система спостережна,
система спостережна,
![]() номер
студента у списку
номер
студента у списку
 ,
,
 .
.
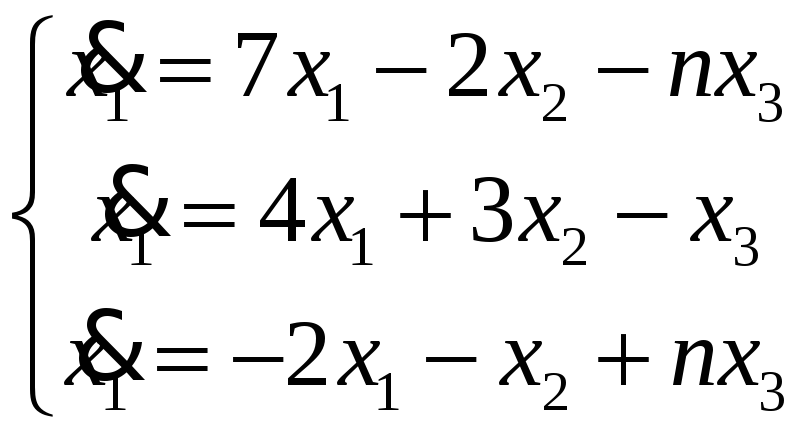
3)
Визначити при якому значенні
![]() система спостережна,
система спостережна,
![]() номер
студента
номер
студента
 ,
,
 .
.
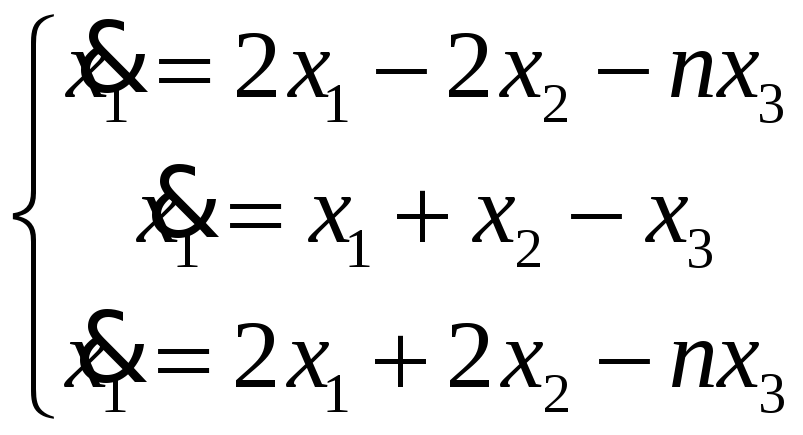
4)
Перевірити на спостережність,
![]() номер
студента
номер
студента
 ,
,
![]() .
.
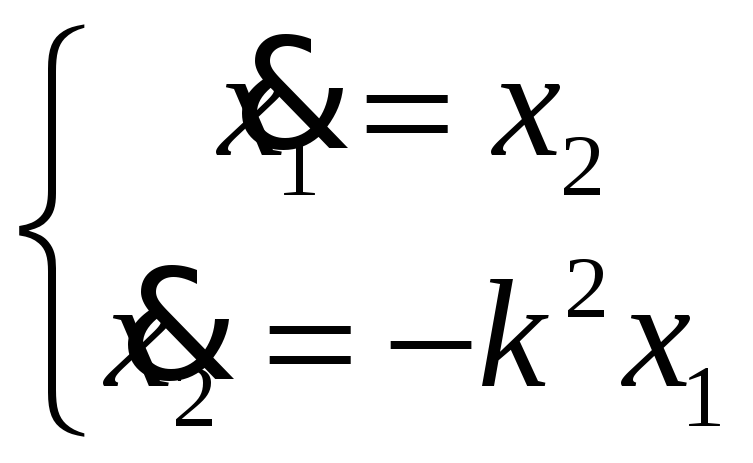
5)
При якому значенні
![]() система спостережна
система спостережна
 ,
,
 .
.
6)
Визначити при якому значенні
![]() система
керована,
система
керована,
![]() номер
студента
номер
студента
 ,
,
 .
.
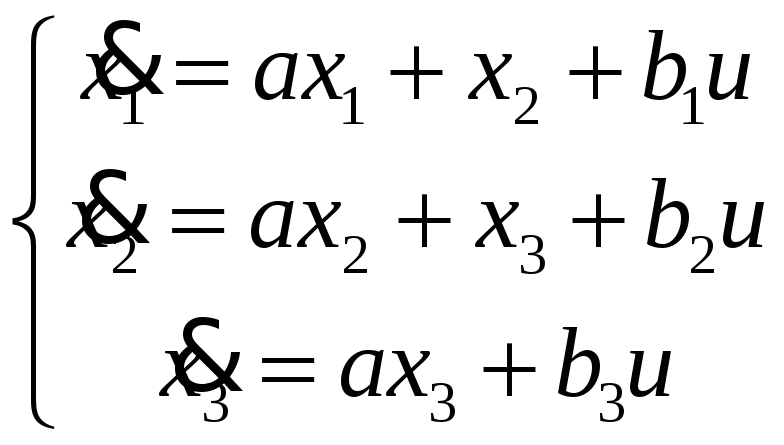
7)
Перевірити систему на керованість.
Визначити при яких
![]() система керована
система керована
 ,
,
 .
.
8)
Перевірити систему на керованість.
Визначити при яких
![]() система керована
система керована
 .
.
Лабораторна робота №5.
AV-41
Бубало Юліїї
Тема. Визначення спостережності та керованості систем з допомогою програмного пакету метематичного моделювання MatLab.
Теоретичні відомості.
Робота в середовищі MatLab із матрицями, серед елементів яких є символьні включає:
а) Опис символьних величин командою syms. Наприклад:
syms a b c;
б) Задання символьної функції командою sym:
v=sym(' функція ');
в) Розв'язок алгебраїчного рівняння командою
p=solve(символьна функція , шукана змінна).
1) clear;
syms a b c;
A=[-1 -1 -1;0 -1 -1;0 0 -1];
B=[a; b; c];
b1=A*B;
b2=A*A*b1;
b3=[B b1 b2]
det(b3)
ans =
(-3)*c^3
v=sym('(-3)*c^3');
p=solve(v,c)
p =
0
0
0
Висновок: система не керована, так як вона дорівнює 0.
2) clear;
syms a;
A=[3 3;2 3];
B=[a; 1];
b1=A*B;
b2=[B b1];
det(b2)
ans =
2*a^2 – 3
v=sym('2*a^2 - 3');
p=solve(v,a)
p =
-6^(1/2)/2
6^(1/2)/2
Висновок: система керована, так як вона не дорівнює 0.
3) clear;
syms a;
A=[7 -2 -3;4 3 -1; -2 -1 3];
B=[3; a; 3];
b1=A*B;
b2=A*A*b1;
b3=[B b1 b2]
det(b3)
ans =
169*a^3 - 39*a^2 - 351*a – 3159
v=sym('169*a^3 - 39*a^2 - 351*a - 3159');
p=solve(v,a)
p =
3
- (27*i)/13 - 18/13
(27*i)/13 - 18/13
Висновок: система керована, так як вона не дорівнює 0.
4) clear;
A=[2 -2 -3;1 1 -1; 2 2 -3];
B=[2 -2 1];
D=B';%Транспонування матриці
b1=A*D;
b2=A*A*b1;
b3=[D b1 b2]
det(b3)
ans =
0
Висновок: система не керована, так як вона дорівнює 0.
A=[2 -2 -6;1 1 -1; 2 2 -6];
b3 =
2 2 -158
-2 -1 11
1 -6 -130
ans =
-2160
Висновок: система керована, так як вона не дорівнює 0.
5) clear;
syms k;
A=[0 1;-k^2 0];
B=[2 1; 2 -1];
b1=A*B;
b2=[B b1]
det(b2)
b2 =
[ 2, 1, 2, -1]
[ 2, -1, -2*k^2, -k^2]
ans =
-4
Висновок: система керована, так як вона не дорівнює 0.
6) clear;
syms p;
A=[p -3 -3;4 3 -1; -2 -1 3];
B=[3; -2; 3];
b1=A*B;
b2=A*b1;
b3=[B b1 b2];
det(b3)
ans =
15*p^2 - 213*p + 702
>> v=sym('15*p^2 - 213*p + 702');
>> p=solve(v,p)
p =
26/5
9
Висновок: система керована, так як вона не дорівнює 0.
7) clear;
syms a d c;
A=[1 1 1;0 1 1;0 0 1];
B=[a; d; c];
b1=A*B;
b2=A*A*b1;
b3=[B b1 b2]
det(b3)
v=sym('(-3)*c^3');
p=solve(v,c)
b3 =
[ a, a + c + d, a + 6*c + 3*d]
[ d, c + d, 3*c + d]
[ c, c, c]
ans =
(-3)*c^3
p =
0
0
0
Висновок: система не керована, так як вона дорівнює 0.
8) clear;
syms a b1 b2 b3;
A=[a 1 0;0 a 1;0 0 a];
B=[b1; b2; b3];
b1=A*B;
b2=A*A*b1;
b3=[B b1 b2]
det(b3)
b3 =
[ b1, b2 + a*b1, a^2*(b2 + a*b1) + a*b3 + 2*a*(b3 + a*b2)]
[ b2, b3 + a*b2, a^2*(b3 + a*b2) + 2*a^2*b3]
[ b3, a*b3, a^3*b3]
ans =
(-3)*a*b3^3
>> v=sym('(-3)*a*b3^3');
>> p=solve(v,a,b)
p =
0
Висновок: система не керована, так як вона дорівнює 0.
Завдання з дошки:
1) clear;
syms a b;
A=[a b;2 3];
B=[6; 0];
b1=A*B;
b2=[B b1];
det(b2)
ans =
72
Висновок: система керована, так як вона не дорівнює 0.
2) clear;
syms a;
A=[4 5 3;3 5 8; 1 -1 0];
B=[3*a; 8; 0];
b1=A*B;
b2=A*b1;
b3=[B b1 b2];
det(b3)
ans =
- 864*a^3 + 2736*a^2 + 6720*a - 21504
>> v=sym('- 864*a^3 + 2736*a^2 + 6720*a - 21504');
>> p=solve(v,a)
p =
19/18 …
Висновок: система керована, так як вона не дорівнює 0.
3) clear;
A=[2 3 4; 3 0 1; 1 2 3];
B=[1; 2; 0];
b1=A*B;
b2=A*b1;
b3=[B b1 b2];
det(b3)
ans =
-72.0000
Висновок: система керована, так як вона не дорівнює 0.