

Студентам ИТ / 2 УПП_ИТ / Основн_литература / ИТ (Excel) / ИТ_автоматизир_управления
.pdfМИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РФ
Московский государственный университет технологий и управления им. К.Г. Разумовского
(Первый казачий университет)
_________________________________________
Кафедра Информационных технологий
Краснов А.Е., Красников С.А., Сагинов Ю.Л., Чернов Е.А., Феоктистова Н.А.
ИНФОРМАЦИОННЫЕ ТЕХНОЛОГИИ АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ
Учебно-практическое пособие для обучения аспирантов, магистров,
а также студентов и бакалавров управленческих направлений подготовки
Москва – 2015
УДК 681.3.06 ББК 65.26с.я73
Краснов А.Е., Красников С.А., Сагинов Ю.Л., Чернов Е.А., Феоктистова Н.А.
ИНФОРМАЦИОННЫЕ ТЕХНОЛОГИИ АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ
Учебно-практическое пособие для обучения аспирантов, магистров, студентов и бакалавров управленческих направлений подготовки.
- М.: МГУТУ им. К.Г. Разумовского, 2015. - 76 с.
Пособие написано в соответствии с Государственным образовательным стандартом 3-го поколения и позволяет обучающимся освоить теоретические основы автоматизированного управления, а также численные методы формального описания реальных объектов управления.
Рецензенты: |
Жиров М.В., |
д.т.н., профессор МГУТУ; |
|
Бородин А.В., |
д.т.н., профессор МГУПП. |
Редактор |
Феоктистова Н.А. |
|
©Краснов А.Е., Красников С.А., Сагинов Ю.Л., Чернов Е.А., Феоктистова Н.А.
МГУТУ им. К.Г. Разумовского, 2015 109004, Москва, Земляной вал, 73
2
Содержание |
|
Введение ………………………………………………. |
4 |
Глава 1. Описание состояний объектов |
|
управления, основы |
|
автоматизированного управления ……… |
6 |
1.1. Описание динамики состояний объектов |
|
управления .………………………………….. |
6 |
1.2.Траектории состояний объектов управления………………………………………… 10
1.3.Оптимальное и условно-оптимальное управление состояниями объектов
управления ……………………………………….. 12
1.4.Подготовка принятия управленческих
решений на основе экспертного опыта ………… 15 Вопросы для самопроверки к главе 1 ……………….. 22
Глава 2. Описание характерных неопределенностей состояний
объектов управления ……………………... 23
2.1.Вероятностное описание состояний объектов управления ……………………………………….. 23
2.2.Вероятностное описание состояний объектов управления при однократных опытах.
Формулы Байеса …………………………………. 37
2.3.Вероятностное описание состояний объектов
управления при повторении опытов …………… |
41 |
2.4. Функции распределений вероятностей |
|
непрерывных случайных величин ……………… |
46 |
2.5.Несмещенность, эффективность и состоятельность статистических оценок.
Расчет статистик ………………………………… 54
2.6.Описание неопределенности с помощью
нечетких функций принадлежности …………… |
60 |
Вопросы для самопроверки к главе 2 ………………... |
65 |
Тренировочные задания ……………………………… |
66 |
Тесты по темам модуля ………………………………. |
68 |
Список рекомендуемой литературы ………………… |
72 |
Словарь основных понятий и сокращений…………... |
73 |
3
Введение
Учебно-практическое пособие «Информационные технологии автоматизированного управления» является важнейшей составной частью многомодульного курса, предназначенного для студентов, обучающихся по специальностям 230102 - «Автоматизированные системы обработки информации и управления», 220301 – «Автоматизация технологических процессов и производств», подготовки аспирантов и соискателей, обучающихся по специальностям 05.13.01 – «Системный анализ, управление и обработка информации», 05.13.06 – «Автоматизация технологических процессов» и 05.13.18 – «Моделирование, численные методы и комплексы программ», бакалавров направления 09.03.01 (230100) – «Информатика и вычислительная техника».
Целью изучения пособия является освоение практических методов формализации информационных технологий автоматизированного управления при решении различных профессиональных задач в условиях неопределенности на базе единого подхода теории систем и системного анализа, теории управления.
Изучение пособия предполагает, что обучающиеся уже освоили общеобразовательные дисциплины: «Математика», «Теория вероятностей», «Информатика».
Пособие предоставляет сконцентрированные знания, содержащиеся в многочисленных источниках отечественных и зарубежных авторов. При желании обучающиеся могут самостоятельно ознакомиться с литературой, рекомендуемой для дополнительного изучения. Однако, изложенный в пособии материал является самодостаточным для освоения информационных технологий описания состояний объектов управления в условиях неопределенности и рисков.
Пособие содержит большое количество математических выражений, которые полезны как справочные данные при решении задач на компьютере.
Всвязи с тем, что в пособии затронут широкий круг вопросов, а объем материала в целом выходит за рамки часов, отведенных для конкретных тем, специальные акценты будут сделаны преподавателями на лекциях и лабораторных занятиях.
Впособии в центре внимания находятся информационные технологии описания состояний и автоматизированного управление состояниями объектов в условиях неопределенности. Под
4
неопределенностью понимается неполнота и неточность информации как об самом объекте управления, так и среде, в которой он действует.
С формальных позиций информационных технологий каждый объект управления (ОУ) будь то предприятие в целом, производственный, финансовый или коммерческий процесс, или отдельная операция обязательно имеет конкретную структуру, определяемую как внутренними свойствами самого объекта, так
иего связями с внешним рынком. Важнейшим является выделение главных составляющих структуры и описание их связей с помощью совокупности различных параметров (констант и переменных). После описания структуры ОУ необходимо выделить основные переменные, которые при неизменной структуре объекта подвержены изменению в процессе его функционирования. Собственно, ради изменения этих переменных (например, количества продукции, прибыли) создается и поддерживается сама структура ОУ. Совокупность данных переменных полностью определяет динамическое состояние ОУ. Изменение динамического состояния в нужном направлении осуществляется с помощью управления - совокупности денежных, материальных
иинформационных средств. Замена начального состояния ОУ на требуемое его конечное состояние является целью управления. Однако в силу определенных ограничений, присущих конкретному ОУ, каждому управлению ставят в соответствие количественные критерии ограничения и критерии качества управления.
Пособие состоит из 2-х глав, заканчивающихся вопросами для самоконтроля. В конце пособия приводятся тесты по освещенным в нем темам. Правильные ответы на тесты студенты могут найти в соответствующих разделах пособия.
Глава 1 пособия содержит информационные технологии описания состояний и автоматизированного управления состояниями объектов в условиях неопределенности в виде формализованных математических моделей.
Глава 2 пособия содержит информационную технологию описания различных видов неопределенностей, встречающихся при описании состояний объектов управления.
5

Глава 1. Описание состояний объектов управления, основы автоматизированного управления
1.1.Описание динамики состояний объектов управления.
Любые финансовые, производственные и коммерческие предприятия или их объединения, соответствующие им действия или операции (как на микро, так и макро уровнях), а также процессы (последовательность операций) на системном уровне возможно рассматривать как некоторые динамические объекты, обладающие определенными структурами, входами и выходами. Это позволяет производить численное моделирование их деятельности с целью поиска приемлемых (наилучших), а иногда и оптимальных (с точки зрения определенных критериев) управляющих решений.
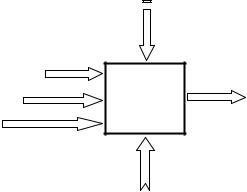
Объект управления (ОУ) на самом верхнем (целевом) уровне может быть описан структурой, приведенной на рис. 1.1.
|
|
|
Объекты |
Субъекты |
Действия |
Цели |
|
|
|
|
|
|
действий |
действий |
|
|
|||
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Материалы |
Персонал |
Виды |
Матери-ые |
|
|
|
|
|
|
Финансы |
Средства |
|
|
|||
|
|
|
деятельности |
Финансовые |
|
|
|||
|
|
|
Информация |
производства |
|
|
|||
|
|
|
|
Социальные |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
Вход |
|
|
|
Выход |
||||
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
Управление
Рис. 1.1
Все входы и выход ОУ образованы материальными («жирные» линии), финансовыми («тонкие» линии) и информационными (пунктирные линии) потоками данных. Через эти потоки ОУ связывается с другими объектами. В то же время следует различать операционные (вход, выход) и управляющие (управление) потоки данных.
По входу и выходу состояние ОУ характеризуется его основными технико-экономическими показателями, совокупность которых (например, из N показателей) и образуют операционные потоки данных (производственная мощность, выпуск продукции
6
в натуральном выражении, товарная продукция, …, прибыль).
Некоторым выделенным компонентам таких потоков ставят в соответствие “N-мерный” вектор St = (St1, St2, … StN) состояния (State) ОУ, зависящий от дискретного времени * t, где t = 0, 1, 2, … T, а – основная единица времени существенного изменения состояния ОУ (квант времени). Изменяющиеся во времени (в общем случае разнородные) переменные Snt называ-
ют динамическими переменными ОУ.
Не вдаваясь в иерархию внутренних и внешних связей ОУ, их структуру описывают “M-мерным” вектором Pt = (Pt1, Pt2, … PtM) внутренних и внешних (определяемых рынком) структурных параметров (Parameters), также изменяющихся со временем (например, себестоимость товарной продукции, численность персонала, …, рыночная цена товара, коэффициенты инфляции и налогообложения, и т.п.). Естественно, что «текущее» состояние ОУ (состояние в данный “t-ый” момент времени) будет как функцией его внутренних и внешних структурных параметров, так и времени – St = F(Pt; t). Как правило, исследуют ОУ со стационарной или квазистационарной структурой, у которых вектор структурных параметров либо не изменяется со временем, либо изменяется значительно медленнее вектора состояния.
Вектор состояния ОУ возможно изменять с помощью дополнительного потока данных (управления), также связанного с материальными, финансовыми и информационными ресурсами. Этому потоку ставят в соответствие “L-мерный” вектор Ct = (Ct1, Ct2, … CtL) управления (Control). Тогда текущее состояние ЭО будет также зависеть и от вектора управления St = F(Ct; Pt; t).
В настоящем пособии рассматривается управление именно состояниями (St) ОУ и не затрагивается управление их структурами (Pt).
В условиях неопределенности описания ОУ вводят также “Q-мерный” вектор Ht = (Ht1, Ht2, … HtQ) неконтролируемых возмущений или, так называемых, помех (Hindrances), действующих на ОУ. Помехи могут непосредственно аддитивно воздействовать на структурные параметры ЭО (Ht Pt, Pt Pt + Pt), поток управляющих данных (Ht Сt, Сt Сt + Сt), или же
примешиваться к вектору его состояния (Ht St, St St + St). В общем случае возможно совместное воздействие помех на ОУ в целом. Тогда текущее состояние ОУ будет зависеть как от контролируемых, так и неконтролируемых величин St = F(Ct; Pt; t Ht). Поскольку поток помех является случайным процессом,
7
то и поток состояний ОУ также условный случайный процесс – поток данных, обусловленный помехой, что отмечают знаком
“ ”.
Наконец, учитывают воздействие на текущий вектор состояния ОУ входного потока, но определяемого его предшествующими векторами состояний. Такое воздействие образуется благодаря обратной связи, организуемой через другие объекты (внешнюю по отношению к рассматриваемому объекту рыночную среду). Например, если скалярная динамическая переменная St обозначает объем выпускаемой продукции в “t-ый” период времени, то в условиях ее реализации и расширенного воспроизводства (возврата в производство части вырученных средств) данный объем будет через накопление зависеть от объемов продукции St-1, St-2, … St-m, выпущенной в “m” предшествующих периодов. Возможно также учесть эффект временного запаздывания и у других введенных выше величин – аргументов функции F. Поэтому в самом общем случае получают многомерное дина-
мическое уравнение состояния ОУ в виде разностной зависимо-
сти («m»-го порядка) с соответствующими начальными условиями S0, C0, P0
St = F(St-1, St-2,…St-m; Ct, Сt-1, Сt-2, …Ct-m; Pt, Pt-1, Pt-2,…Pt-m; t Ht),
St=0 = S0, Ct=0 = C0, Pt=0 = P0 . |
(1.1.1) |
Зависимость или оператор F может задаваться с помощью формул (полиномиальных, тригонометрических, показательных или иных аналитических функций), графиков или таблиц. Так, например, одномерное динамическое уравнение состояния линейного ОУ в самом общем случае представляют линейным разностным уравнением:
St = m k St k |
+ m |
k Ct ,k + Ht , |
(1.1.2) |
k 1 |
k 1 |
|
|
где скалярные параметры k и k являются компонентами вектора P структурных параметров ОУ.
Объекты, описываемые приведенными общими уравнени-
ями, называют регрессионно-авторегрессионными объектами,
или, кратко, РАР-объектами («m»-го порядка). Объекты, описываемые уравнениями частного вида
St = m |
k Ct k + Ht , St |
= m |
k Ct ,m + Ht , (1.1.3) |
k 1 |
|
k 1 |
|
|
8 |
|
|
называют регрессионными объектами, или, кратко, Р-объектами («m»-го порядка). Второе уравнение описывает статический объект с «m» входами и одним выходом. Объекты, описываемые уравнением
St = m k St k + Ht , |
(1.1.4) |
k 1 |
|
называют авторегрессиоными объектами, или, кратко, АРобъектами («m»-го порядка).
Для многих экономических задач при исследовании зависимости состояний ОУ от непрерывного времени “t” и аналитическом задании функции F динамическое уравнение состояния задают в виде дифференциального уравнения первого порядка
dS(t)/dt = F[S(t); C(t); P(t); t H(t)], |
(1.1.5) |
эквивалентного разностному уравнению частного вида (первого
порядка) St = F(St-1; Ct; Pt; t Ht) при дискретном времени “t”.
С учетом принятых обозначений ОУ можно рассматривать как функциональный или операционный элемент с Pt динамической структурой, рекуррентно (по шагам) преобразующий по закону F поток входных данных St-1, St-2, …St-r в поток выходных данных St при наличии управляющего потока Ct и помех Ht (рис.
1.1.2).

 Ht
Ht
St-1
ОУ
St
Pt
St-r
Ct
Рис. 1.1.2
9
1.2. Траектории состояний объектов управления.
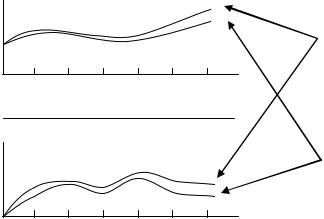
При заданных управлениях и отсутствии помех временную динамику (эволюцию) состояний ОУ можно изобразить графически с помощью серии N диаграмм (по числу скалярных величин вектора St), как показано на рис. 1.2.1.
S1t
С*
0 1 2 T-1 T t
SN t |
С** |
|
0 |
1 |
2 |
T-1 T |
t |
Рис. 1.2.1
Как видно из рисунка, для разных управлений (C* и C**) будут реализованы различные траектории компонент вектора состояния ОУ.
Диаграммы, подобные изображенным на рис. 1.2.1, широко используют в системах контроля качества продукции при входном (метод Тагучи) и выходном контролях изделий по выбранным параметрам их состояний.
При наличии помех и заданном управлении данные траектории характеризуют случайные процессы. На рис. 1.2.2 показаны отдельные реализации таких процессов, соответствующие серии опытов над ОУ при одном и том же управлении C.
По рис. 1.2.1 и 1.2.2 видно, что, изменяя управление, возможно компенсировать нежелательное воздействие помех, т.е. формировать траектории компонент вектора состояния ОУ в нужном «направлении».
10