

Студентам ИТ / 2 УПП_ИТ / Основн_литература / ИТ (Excel) / ИТ_автоматич_управл
.pdfМИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИЯ РФ
МОСКОВСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ТЕХНОЛОГИЙ И УПРАВЛЕНИЯ
имени К.Г. Разумовского
(Первый казачий университет)
___________________________________________
Кафедра Информационных технологий
Краснов А.Е., Красников С.А., Чернов Е.А.
ИНФОРМАЦИОННЫЕ ТЕХНОЛОГИИ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Учебно-практическое пособие для обучения аспирантов, магистров,
а также студентов и бакалавров управленческих направлений подготовки
Москва – 2015
УДК 681.3.06 ББК 65.26с.я73
Краснов А.Е., Красников С.А., Чернов Е.А.
ИНФОРМАЦИОННЫЕ ТЕХНОЛОГИИ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Учебно-практическое пособие для аспирантов, магистров, студентов и бакалавров управленческих направлений подготовки.
- М.: МГУТУ им. К.Г. Разумовского, 2015. - 82 с.
Пособие написано в соответствии с Государственным образовательным стандартом 3-го поколения и позволяет обучающимся освоить теоретические основы автоматизированного управления, а также численные методы формального описания реальных объектов управления.
Рецензенты: |
Жиров М.В., |
д.т.н., профессор МГУТУ; |
|
Бородин А.В., |
д.т.н., профессор МГУПП. |
Редактор: |
Феоктистова Н.А., к.т.н., доцент МГУТУ. |
|
© Краснов А.Е., Красников С.А., Чернов Е.А.
МГУТУ им. К.Г. Разумовского, 2015. 109004, Москва, Земляной вал, 73
2
Содержание |
|
Введение ………………………………………………… 4 |
|
Глава 1. Автоматические системы управления ........ |
7 |
1.1.Принцип обратной связи ………………………….. 7
1.2.Математические модели физических систем ……. 15
1.3.Преобразование Лапласа и передаточные функции линейных систем ……………………….. 18
1.4.Модели линейных систем
ввиде сигнальных графов ………………………… 27
1.5.Законы регулирования и оценки качества ……….. 31
1.6.Робастные системы управления …………………... 40
Вопросы для самопроверки к главе 1 ………………..... 45 |
|
Глава 2. Цифровые системы управления .................. |
47 |
2.1.Дискретные сигналы и их z-преобразование .............. 47
2.2.Анализ устойчивости дискретных систем ……….. 53
2.3.Реализация цифровых регуляторов ……………….. 54
2.4.Модели систем в переменных состояния ……….... 55
2.5.Идентификация и устойчивость
дискретных моделей линейных систем …………... 59 2.6. Экспертные корреляционно-экстремальные
системы управления для спектральной компьютерной квалиметрии………………………... 63
Вопросы для самопроверки к главе 2 ………………....... 71 Тренировочные задания ………………………………… 72 Тесты по темам модуля ………………………………..... 75 Список рекомендуемой литературы ………………….... 79 Словарь основных понятий и сокращений …………..... 79
3
Введение
Учебно-практическое пособие «Информационные технологии автоматизированного управления» является важнейшей составной частью многомодульного курса, предназначенного для студентов, обучающихся по специальностям 230102 - «Автоматизированные системы обработки информации и управления», 220301 – «Автоматизация технологических процессов и производств», подготовки аспирантов и соискателей, обучающихся по специальностям 05.13.01 – «Системный анализ, управление и обработка информации», 05.13.06 – «Автоматизация технологических процессов» и 05.13.18 – «Моделирование, численные методы и комплексы программ», бакалавров направления 09.03.01 (230100) – «Информатика и вычислительная техника».
Целью изучения пособия является освоение практических методов формализации информационных технологий автоматического управления при решении различных профессиональных задач в условиях неопределенности на базе единого подхода теории систем и системного анализа, теории управления.
Изучение пособия предполагает, что обучающиеся уже освоили общеобразовательные дисциплины: «Физика», «Химия», «Математика», «Теория вероятностей», «Информатика».
Пособие предоставляет сконцентрированные знания, содержащиеся в многочисленных источниках отечественных и зарубежных авторов. При желании обучающиеся могут самостоятельно ознакомиться с литературой, рекомендуемой для дополнительного изучения. Однако, изложенный в пособии материал является самодостаточным.
В связи с тем, что в пособии затронут широкий круг вопросов, а объем материала в целом выходит за рамки часов, отведенных для соответствующих тем, специальные акценты будут сделаны преподавателями на лекциях и лабораторных занятиях.
С формальных позиций теории систем и управления каждый технологический объект (ТО) или технологический процесс (ТП), будь то предприятие в целом, производственный процесс или совокупность технологических операций, обязательно имеет конкретную структуру, определяемую как внутренними свойствами самого ТО/ТП, так и его связями с внешней средой. Важнейшим является выделение главных составляющих структуры
4
и описание их связей с помощью совокупности различных параметров (констант и переменных). После описания структуры ТО/ТП необходимо выделить основные переменные, которые при неизменной структуре ТО/ТП подвержены изменению в процессе его функционирования. Собственно, ради изменения этих переменных (например, количества продукции) создается и поддерживается сама структура ТО/ТП. Совокупность данных переменных полностью определяет динамическое состояние ТО/ТП. Изменение динамического состояния в нужном направлении осуществляется с помощью управления - совокупности денежных, материальных и информационных средств. Замена начального состояния ТО/ТП на требуемое его конечное состояние является целью управления. Однако в силу определенных ограничений, присущих конкретному ТО/ТП, каждому управлению ставят в соответствие количественные критерии ограничения и критерии качества управления.
В отличие от управления состояниями ТО/ТП, которое предполагает неизменность структуры объекта управления, управление структурой ТО/ТП занимается именно вопросами рационального изменения структур управляемых объектов. Здесь также широко используется формализм состояний объектов управления, целевых критериев и критериев качества управления. Однако размерность задач значительно увеличивается за счет включения параметров структурного описания объектов как
впеременные их состояний, так и в целевые критерии. Поэтому значительно увеличивается сложность задач структурного управления.
Управление структурой ТО/ТП нашло широкое отражение
втаких приложениях, как реинженеринг, консалтинг, корпоративное управление бизнес процессами, управление проектами. Этим направлением практически занимаются многие зарубежные и отечественные фирмы – разработчики комплексных интегрированных и корпоративных управляющих сетевых систем, выполненных по современным технологиям систем управления базами данных (СУБД) в файл-серверной, клиент-серверной, многозвенной и распределенной архитектурах.
По оценкам экспертов, количество различных прикладных программ для управления состояниями и структурой ТО/ТП сегодня на отечественном рынке насчитывает десятки тысяч вариантов. Предлагаемые фирмами прикладные программные продукты работают в сетевых вариантах (т.е. обслуживают сотни и тысячи рабочих мест) и позволяют осуществлять комплексную
5
автоматизацию таких важнейших сфер деятельности как бухгалтерский учет, управление персоналом, управление запасами, сетевое планирование, инновационное проектирование и реинженеринг предприятий, учет и управление производственными и коммерческими операциями и т.п. Разработчики включают в интегрированные и корпоративные программные продукты как средства управления состояниями предприятий, так и средства управления их структурой.
Однако следует отметить, что если решение задач управления состояниями ТО/ТП в большинстве предлагаемых продуктов унифицировано и однотипно в силу завершенности теории, то решение задач управления структурой ТО/ТП осуществляется эвристически на основании узкого опыта внедрения продуктов в конкретные отрасли. Именно с этим связано обилие фирм и предлагаемых ими программных продуктов.
Еще раз отметим, что пособие ориентировано на изучение достаточно полно разработанных в технике систем управления состояниями ТО/ТП. В нем изучаются не технологические проблемы, а проблемы применения систем управления состояниями технологических объектов на известных технологических примерах. Поэтому пособие не может заменить собою изучение сугубо технологических дисциплин, описывающих сущности технологических объектов и характерные для них примеры.
Пособие состоит из 2-х глав, заканчивающихся вопросами для самоконтроля. В конце пособия приводятся тесты по его темам. Правильные ответы на тесты студенты могут найти в соответствующих разделах пособия.
Глава 1 пособия содержит описание самых распространенных автоматических систем управления – систем автоматического регулирования.
Глава 2 пособия содержит описание цифровых систем управления. В модуле рассматриваются также экспертные кор- реляционно-экстремальные системы управления для спектральной компьютерной квалиметрии.
6
Глава 1. Автоматические системы управления
1.1. Принцип обратной связи.
Автоматическая система управления – это соединение отдель-
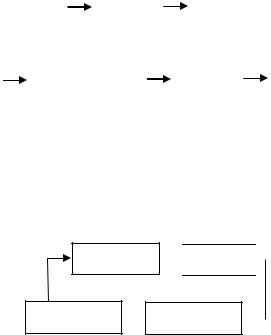
ных элементов в определенную конфигурацию, обеспечивающую заданные характеристики. В основе ее анализа лежит теория линейных систем, предполагающая наличие причинно-следственных связей между элементами. Поэтому ТП или ТО, подлежащий управлению, может быть представлен в виде блока, изображенного на рис. 1.1.1. Связь между входом и выходом – это, по сути, преобразование одного сигнала (причины) в другой (следствие), причем довольно часто с усилением мощности. В разомкнутой системе управления для получения желаемой реакции объекта обычно используется регулятор или исполнительное устройство, как показано на рис. 1.1.2. В разомкнутой системе обратная связь отсутствует.
Вход |
ТО / ТП |
Выход |
|
|
|
Рис. 1.1.1
|
|
|
|
|
Желаемое |
Исполнительное |
|
ТО / ТП |
Выход |
значение |
|
|||
устройство |
|
|||
выхода |
|
|
|
|
|
|
|
|
Рис. 1.1.2
В отличие от разомкнутой, в замкнутой системе производится измерение действительного значения выходного сигнала, которое затем сравнивается с его желаемым значением. Измеренное значение выхода называют сигналом обратной связи. Простейшая замкнутая система управления – система регулирования, поддерживающая желаемое значение выходного сигнала, изображена на рис. 1.1.3.
Регулятор  ТО / ТП
ТО / ТП  Выход
Выход
Желаемое
значение  Сравнение
Сравнение  Измерение
Измерение  выхода
выхода
Рис. 1.1.3
7
Замкнутая система стремится поддержать заданное соотношение между двумя переменными путем сравнения функций от этих переменных и использования их разности в качестве управляющего сигнала. Чаще всего разность между заданным значением выходной переменной и ее действительным значением усиливается и используется для воздействия на объект управления, в результате чего эта разность постоянно уменьшается. Принцип обратной связи лежит в основе анализа и синтеза систем управления.
Взамкнутой системе производится измерение выходной переменной и его результат в виде сигнала обратной связи сравнивается с эталонным входным сигналом, несущим информацию о заданном значении выходной переменной.
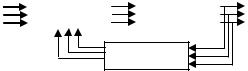
Всвязи с возрастающей сложностью объектов управления и желанием добиться оптимальных показателей качества, за последнее десятилетие резко повысилась роль автоматического управления. К тому же во многих случаях возникает необходимость учитывать взаимное влияние выходных переменных друг на друга, что неизбежно отражается на структуре системы. Конфигурация такой многомерной системы управления приведена на рис. 1.1.4.
Желаемое |
|
|
|
|
|
|
|
|
|
Выходные |
|
значение |
Регулятор |
|
ТО / ТП |
|
|
выходных |
|
|
переменные |
||
|
|
|
|
||
переменных |
|
|
|
|
|
|
|
|
|
|
Измерение
Рис. 1.1.4
Типичным примером разомкнутой системы управления может служить кухонный электротостер.
В качестве примера замкнутой системы можно рассматривать ситуацию, когда водитель автомобиля при движении по дороге наблюдает за его положением и осуществляет необходимые воздействия на органы управления (рулевое колесо и педали).
Замкнутая система по своим характеристикам будет превосходить разомкнутую, т. к. она всегда будет стремиться свести ошибку к минимуму. Если элементы системы обладают стабильными характеристиками, то в замкнутой системе можно добиться точности поддержания заданного значения скорость и, в 100 раз превышающей аналогичный показатель разомкнутой системы.
Управление с использованием обратной связи – это неоспоримый факт нашей повседневной жизни. Управлять автомобилем очень прият-
8
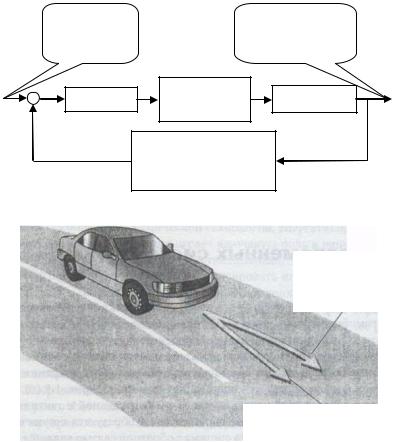
но, когда машина мгновенно реагирует на действия водителя. Многие автомобили с этой целью оснащены гидроусилителями руля и тормозов. Простая блок-схема системы управления движением автомобиля изображена на рис. 1.1.5 а. Желаемое направление движения сравнивается с результатом измерения действительного направления и в итоге образуется ошибка, как показано на рис. 1.1.5 б. Информация о действительном направлении поставляется за счет визуальной и тактильной (телодвижение) обратной связи. Дополнительная обратная связь образуется ощущением рулевого колеса руками водителя (датчиком). На рис. 1.1.5. в изображена типичная реакция автомобиля на действия водителя.
Желаемое |
Действительное |
направление |
направление |
движения |
движения |
+ |
|
|
|
Водитель |
Рулевой |
Автомобиль |
|
механизм |
|||
- |
|
||
|
|
||
|
Визуальные и |
|
|
|
тактильные средства |
|
|
|
измерения |
|
Рис. 1.1.5 а
Желаемое
направление
движения
Действительное направление движения
Рис. 1.1.5 б
9
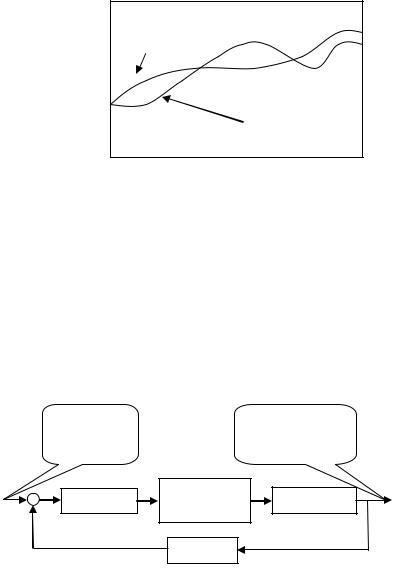
Реакция Желаемое автомобиля направление (направление движения
движения)
Действительное
направление
движения
0 |
Время, t |
Рис. 1.1.5 в
Системы управления функционируют по замкнутому циклу, как показано на рис. 1.1.6. Если датчик является точным, то измеренное значение выхода системы равно его действительному значению. Разность между желаемым и действительным значениями выходной переменной, т. е. ошибка, поступает на управляющее устройство (например, усилитель). С его выхода сигнал поступает на исполнительное устройство, которое воздействует на объект управления таким образом, чтобы уменьшить ошибку. Например, если корабль пытается отклониться от курса вправо, руль приводится в движение так, чтобы повернуть корабль влево. Система на рис. 1.1.6 – это система с отрицательной обратной связью, т. к. выходной сигнал вычитается из входного, а разность подается на вход усилителя.
Желаемое |
Действительное |
значение |
значение |
выхода |
выхода |
+ |
|
|
|
Регулятор |
Исполнит. |
ТО / ТП |
|
устройство |
|||
- |
|
||
|
|
||
|
Датчик |
|
|
Измеренное значение |
|
Обратная связь |
|
выхода |
|
|
Рис. 1.1.6
10