

Лекції та практичні з МатАналізу / 2. Лекції / Лекція 15-16
.pdfЛекції 15 -16. Визначений інтеграл, означення, властивості. Практичне тлумачення, прості практичні задачі. Похідна інтеграла зі
змінною верхньою межею. Формула Ньютона –Лейбніца. Стандартна техніка визначеного інтегрування. Оцінки інтегралів. Інтегрування з застосуванням таблиць та пакетів програм
1. Означення та властивості визначеного інтеграла |
|
|||||
1.1.Задача про знаходження площі криволінійної трапеції |
|
|||||
Історично поняття первісної функції тісно пов'язане з задачею про знаходження площі |
||||||
фігури. |
|
|
|
|
|
|
Нехай на проміжку [a,b] задана неперервна функція y = f (x) , що набуває лише невід'ємних |
||||||
значень (рис.1). |
|
|
|
|
|
|
y |
|
|
|
|
y=f(x) |
|
M |
|
|
|
|
|
|
|
|
|
|
C |
|
|
|
B |
|
|
|
|
|
yi |
|
|
|
|
|
|
|
|
|
|
|
|
|
m |
|
|
|
|
|
|
|
Aa x1 |
|
|
xi |
xn-1 b D |
|
0 |
xi-1 |
ξ |
xi |
x |
||
|
|
|
i |
|
|
|
Рис.1. Криволінійна трапеція та її площа. |
|
|||||
Розглянемо фігуру ABCD , що обмежена кривою y = f (x) , вертикалями x = a, x = b і відрізком [a; b] осі OX – така фігура називається криволінійною трапецією. Поділимо її основу довільними точками a = x0 , x1 , ..., xn = b на n частин, причому x0 < x1 <... < xn і введемо
позначення x1 = x1 − x0 ; x2 = x2 − x1 ; xn = xn − xn−1 .
Якщо через точки поділу провести вертикальні лінії, то трапеція ABCD розіб'ється на n криволінійних трапецій. Замінимо тепер наближено кожну трапецію деяким прямокутником, основа якого така ж як у трапеції, а висота збігається з ординатою однієї із точок лінії
yi = f (ξi ) . Тоді площа криволінійної трапеції S наближено може бути замінена площею деякої ступінчатої фігури, складеної з окремих прямокутників
Sn = ∑n |
yi xi = ∑n |
f (ξi ) xi . |
i=1 |
i=1 |
|
Якщо всі довжини xi прямують до нуля, то різниця між точним S і наближеним Sn значеннями площі трапеції S − Sn також наближається до нуля.
Отже, точним значенням площі можна вважати
|
|
|
|
n |
|
|
|
|
|
n |
|
|
|
|
. |
S = lim S |
n |
= lim |
∑ |
y |
i |
x |
i |
= lim |
∑ |
f (ξ |
) |
x |
i |
||
x |
→0 |
n→∞ |
|
|
n→∞ |
i |
|
|
|
||||||
i |
|
|
|
i=1 |
|
|
|
|
|
i=1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Зауваження. Для позначення граничного значення такої суми Лейбніц ввів символ ∫ydx , де ydx нагадує типовий доданок суми (1.1), а знак ∫ є стилізованою буквою S – початковою буквою латинського слова "Summa" . Оскільки площа, що представляє це граничне значення, тісно пов’язана з первісною функції y = f (x) , то символ ∫ зберігається і для сукупності усіх
первісних. Враховуючи зв'язок між знаходженням площ плоских фігур та їх квадратурою, саме знаходження інтегралів часом називають квадратурою.

Для того, щоб сказане вище могло поширюватись і на функції, що приймають і від'ємні значення, достатньо домовитись вважати від'ємними площі частин фігури, розміщених під віссю OX .
1.2. Означення визначеного інтеграла та умови його існування
Враховуючи наведені вище позначення, введемо означення визначеного інтеграла.
Означення 1.1. Число δ =max xi називається діаметром розбиття.
i=1,n
На кожному з відрізків [x0 ; x1 ], [x1; x2 ],…, [xn−1; xn ] виберемо по точці, які позначимо ξ1 ,ξ2 ,...,ξn (x0 <ξ1 <ξ2 < ... <ξn < b) і складемо суму
Sn |
= f (ξ1 ) x1 + f (ξ2 ) x2 +... + f (ξn ) xn = ∑n |
f (ξi ) |
xi . |
(1.1) |
|
i=1 |
|
|
на відрізку [a;b]. |
Ця сума називається інтегральною сумою функції |
f (x) |
|||
Сума Sn |
залежить від способу розбиття відрізка [a;b] на частини [xi−1 ; xi ] і від вибору точок |
|||
ξi на кожному з цих відрізків. Виберемо такі розбиття, діаметри яких прямують до нуля (при
цьому, очевидно, кількість відрізків n прямує до безмежності). Для кожного з розбиттів складемо інтегральну суму (1.1). Припустимо, що при δ → 0 (при цьому n →∞) границя
послідовності часткових сум Sn прямує до деякого числа S : limSn = lim∑n |
f (ξi ) xi = S . |
|
δ→0 |
δ→0 i=1 |
|
Означення 1.2. Якщо для довільних розбиттів відрізка [a;b], діаметри δ яких прямують до нуля, і для довільного вибору точок ξi на відрізках [xi−1; xi ] інтегральна сума
Sn = ∑n |
f (ξi ) xi прямує до одного і того ж числа S , то це число називається |
||||
|
i=1 |
|
|
|
|
визначеним інтегралом функції f (x) |
на відрізку [a;b] і позначається ∫b |
f (x)dx . |
|||
|
|
|
|
a |
|
Тобто |
|
|
|
|
|
∫b |
f (x)dx = lim∑n |
f (ξi ) xi , |
|
(1.2) |
|
a |
|
δ→0 i=1 |
|
|
|
a називається нижньою межею інтеграла, b – верхньою межею; [a;b] – відрізок |
|||||
інтегрування, x – змінна інтегрування. |
|
|
|||
Означення 1.3. Якщо для функції f (x) границя (1.2) існує, то функція називається |
|||||
інтегровною на відрізку [a;b]. |
|
|
|||
Необхідною умовою існування визначеного інтеграла (1.2) на відрізку [a;b] є обмеженість функції y = f (x) на цьому відрізку. Дійсно, якщо функція була б необмеженою, то за рахунок вибору точки ξ можна зробити значення f (ξ) , а разом з ним і суму як завгодно великою. За
цих умов скінченної границі для S , очевидно, не існувало б. Тому надалі вважатимемо, що розглядувані функції є обмежені, тобто m ≤ f (x) ≤ M .
1.3. Суми Дарбу та їх властивості
Позначимо через m і M найменше і найбільше значення функції f (x) на відрізку [a, b]. Найбільше і найменше значення функції f (x) на кожному з інтервалів [xi−1; xi ] (i =1, n) позначимо M i і mi відповідно. Побудуємо суми
Sn = m1 |
x1 + m2 |
x2 +... + mn xn |
= ∑n |
mi xi ; |
|
|
|
|||
|
|
|
|
i=1 |
|
|
|
|
|
|
Sn = M1 |
x1 + M 2 x2 +... + M n xn = ∑n |
M i |
xi , |
|
|
|
||||
|
|
|
|
i=1 |
|
|
|
|
|
|
які називаються нижньою і верхньою інтегральними сумами Дарбу. |
||||||||||
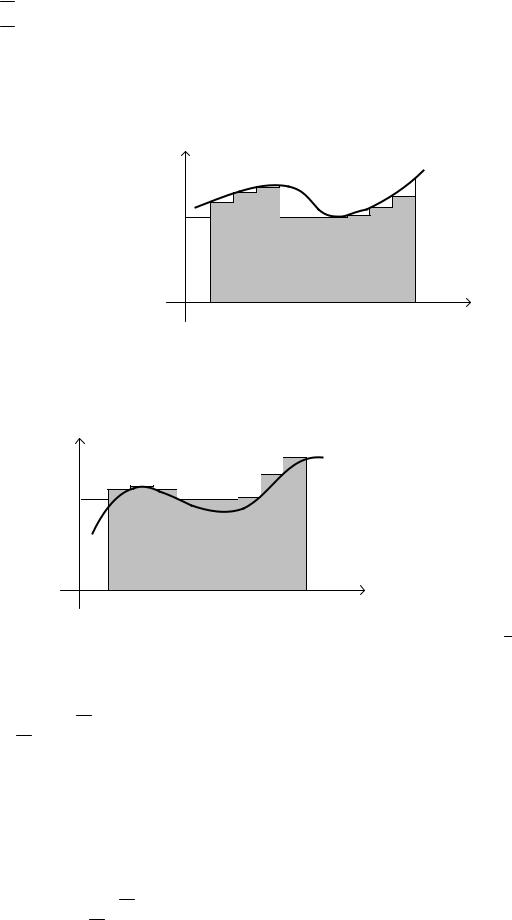
Для невід’ємної функції ( f (x) ≥ 0) вони мають такий зміст (рис.2, 3): нижня інтегральна |
||||||||||
сума Дарбу чисельно дорівнює площі ступінчастої фігури з вертикалями x = x0 , x = x1 ,…, |
||||||||||
x = xn , що вписана в криволінійну трапецію, обмежену лініями y = f (x) , y = 0 , x = a , x = b . |
||||||||||
|
|
|
y |
|
|
|
|
|
y=f(x) |
|
|
|
|
mi |
|
|
|
|
|
|
|
|
|
|
0 |
a x1 |
xi-1 |
xi |
xn-1 b |
x |
||
|
|
Рис.2. Геометрична інтерпретація нижньої суми Дарбу Sn |
||||||||
За аналогією, верхня інтегральна сума Дарбу чисельно дорівнює площі ступінчастої фігури |
||||||||||
(рис.3) з вертикалями x = x0 , |
x = x1 ,…, |
x = xn , описаної навколо криволінійної трапеції, що |
||||||||
обмежена лініями x = a , |
x = b , y = 0 , |
y = f (x) . |
|
|
|
|||||
|
y |
|
|
|
|
|
y=f(x) |
|
|
|
|
Mi |
|
|
|
|
|
|
|
|
|
|
0 |
a x1 |
xi-1 |
|
|
xi |
xn-1 b |
x |
|
|
Рис.3. Геометрична інтерпретація верхньої суми Дарбу Sn
Нижня та верхня інтегральні суми мають такі властивості:
1. Sn ≤ Sn ≤ Sn .
˛ Оскільки для довільної точки ξi |
з відрізку [xi−1 |
; xi ] справедливою є нерівність |
||||||||||||||||
mi ≤ f (ξi ) ≤ M i , а, отже, і mi xi |
≤ f (ξi ) xi ≤ M i |
xi |
( xi > 0) , то |
|||||||||||||||
∑n |
mi xi ≤ ∑n |
f (ξi ) xi ≤ ∑n |
M i |
|
xi . |
|
|
|
|
|
|
|
||||||
i=1 |
|
|
i=1 |
|
|
|
i=1 |
|
|
|
|
|
|
|
|
|
|
|
Оскільки ∑n |
mi |
xi |
= Sn , ∑n |
M i |
xi = |
|
, ∑n |
f (ξi ) |
xi = Sn , матимемо Sn ≤ Sn ≤ |
|
. |
|||||||
Sn |
Sn |
|||||||||||||||||
|
i=1 |
|
|
|
|
i=1 |
|
|
|
|
i=1 |
|
|
|
|
|
|
|
2. m(b − a) ≤ Sn ≤ Sn ≤ M (b − a) (довести самостійно).
1.4. Умова існування визначеного інтеграла
За допомогою сум Дарбу можна сформулювати умову існування визначеного інтеграла.

Теорема 1.2. Для існування визначеного нтеграла необхідно і достатньо, щоб
lim(Sn − Sn ) =0 .
δ→0
Вкажемо декілька класів інтегровних функцій. |
|
|||
1. |
Якщо функція |
f (x) |
неперервна на [a,b], то вона інтегровна на цьому відрізку. |
|
2. |
Якщо функція |
f (x) |
неперервна на [a,b] всюди за виключенням |
скінченної кількості |
|
точок, які є точками розриву першого роду, то вона інтегровна на цьому відрізку. |
|||
3. |
Якщо функція |
f (x) монотонна і обмежена на [a,b], то вона інтегровна на цьому відрізку. |
||
2.Геометричний та фізичний зміст визначеного інтеграла
2.1.Геометричний зміст визначеного інтеграла
Для невід’ємної функції y = f (x) інтеграл ∫b |
f (x)dx |
чисельно дорівнює площі криволінійної |
a |
|
|
трапеції, обмеженої лініями x = a , x = b , y = f (x) , |
y = 0 (див. п. 1.1). |
|
2.2. Фізичний зміст визначеного інтеграла
Задача. Знаючи швидкість v = v(t) прямолінійного руху точки, знайти шлях, пройдений нею
за проміжок часу 0 ≤ t ≤ T .
Напрямляючи вісь Ox вздовж руху точки і вважаючи x = x(t) рівнянням її руху, матимемо:
v(t) = |
dx |
, звідки dx = v(t)dt . Інтегруючи обидві частини рівності в межах від |
0 до T , |
|
||
|
|
|||||
|
|
dt |
|
|
|
|
знайдемо відповідний шлях S = x(T ) − x(0) = T∫v(t)dt . |
|
|
||||
|
|
|
|
0 |
|
|
|
3. Основні властивості визначеного інтеграла |
|
|
|||
|
3.1.Властивості, що виражаються рівностями |
|
|
|||
1. Величина визначеного інтеграла не залежить від змінної інтегрування: ∫b |
f (x)dx = ∫b |
f (t)dt . |
||||
|
|
|
|
a |
a |
|
2. При зміні порядку інтегрування знак інтеграла змінюється на протилежний: |
|
|||||
∫b |
f (x)dx = −∫a |
f (x)dx . |
|
|
||
ab
Зцієї властивості випливає, що
∫a |
f (x)dx = 0 . |
(3.1) |
a |
|
|
3. Сталий множник можна виносити за знак інтеграла: |
||
∫b Af (x)dx = A∫b |
f (x)dx . |
|
aa
4.Якщо f (x) і g(x) інтегровні на [a;b], то сума f (x) + g(x) також інтегровна на [a;b],
причому
∫b ( f (x) + g(x))dx = ∫b |
f (x)dx + ∫b g(x)dx . |
|||
a |
|
a |
|
a |
5. Якщо f (x) інтегровна на [a; c] і [c;b], то вона інтегровна і на [a;b], причому |
||||
∫c |
f (x)dx + ∫b |
f (x)dx = ∫b |
f (x)dx . |
|
a |
c |
|
a |
|
Зауваження. Точка c може бути розміщена довільно щодо a,b .
3.2.Властивості, що виражаються нерівностями
Вкажемо декілька властивостей визначених інтегралів, що виражаються нерівностями, причому вважаємо, що a < b .
1. |
Якщо |
f (x) інтегровна на [a;b] і f (x) ≥ 0 , то ∫b |
f (x)dx ≥ 0 . |
|
|||||||||
|
|
f (x) інтегровна на [a;b], то функція |
|
a |
|
|
також інтегровна на [a;b], причому |
||||||
2. |
Якщо |
|
f (x) |
|
|||||||||
|
|
||||||||||||
∫b |
f (x)dx ≤ ∫b |
|
f (x) |
|
dx . |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|||
a |
|
a |
|
|
|
|
f (x) неперервна на [a;b] і M |
|
|
|
|
|
|
3. |
Якщо функція |
|
та m –- її найбільше і найменше значення на |
||||||||||
цьому відрізку, то |
|
|
|
|
|
|
|||||||
|
m(b −a) ≤ ∫b |
f (x)dx ≤ M (b −a) . |
|
|
|
|
|
(3.2) |
|||||
|
|
|
|
a |
|
|
|
|
|
|
|
||
4. |
Якщо |
f (x) і g(x) інтегровні на [a;b], і f (x) ≤ g(x) на цьому відрізку, то ∫b |
f (x)dx ≤ ∫b g(x)dx . |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
a |
a |
Приклад 3.1. Вияснити (не обчислюючи), який з інтегралів більший: ∫1 x3 cos2 xdx чи ∫1 x2 cos2 xdx .
|
|
|
|
|
|
|
|
|
|
|
|
0 |
0 |
||
|
Оскільки x3 ≤ x2 при 0 ≤ x ≤1 та cos2 x ≥0 , то x3 cos2 x ≤ x2 cos2 x і, згідно з властивістю 4, |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
1 |
1 |
|
|
|
другий інтеграл не менший за перший, тобто ∫x3 cos2 xdx ≤ ∫x2 cos2 xdx . |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
0 |
0 |
|
|
|
Приклад 3.2. Оцінити інтеграл |
2∫π |
dx |
. |
|
|
|
|
||||||||
11 + 3 cos x |
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
набуває при x =π , коли |
||
|
Найбільшого значення підінтегральна функція f (x) = |
|
|||||||||||||
|
11 + 3 cos x |
||||||||||||||
косинус дорівнює −1 і знаменник мінімальний, тобто M = f (π) = 1 . |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
8 |
|
|
|
За аналогією, при x =0 |
та x = 2π |
підінтегральна функція набуваає найменшого значення: |
|||||||||||||
m = f (0) = f (2π) = |
|
|
1 |
|
. |
|
|
|
|
|
|
|
|
|
|
14 |
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
Отже, 1 ≤ f (x) ≤ |
1 |
|
на відрізку [0; 2π], звідки, враховуючи властивість 3 ( b − a = 2π ) , матимемо: |
||||||||||||
14 |
|
||||||||||||||
|
8 |
|
|
|
|
|
|
|
|
|
|
|
|||
1 |
2π |
|
1 |
|
|
|
π |
2π |
dx |
|
π . |
|
|||
2π ≤ ∫ f (x)dx ≤ |
|
2π |
або |
≤ ∫ |
dx ≤ |
|
|||||||||
8 |
0 |
14 |
|
|
4 |
0 |
11 +3cos x |
|
7 |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Теорема про середнє. Якщо функція |
f (x) неперервна на [a;b], то на цьому відрізку |
||||||||||||||
знайдеться така точка ξ , для якої виконується співвідношення |
|
||||||||||||||
∫b |
f (x)dx = f (ξ)(b −a) . |
|
|
|
|
|
|
|
|
|
|||||
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
˛ Нехай a < b . Тоді, якщо m і M є відповідно найменшим і найбільшим значенням функції
f (x) на відрізку [a;b], то, згідно з (3.2), |
m ≤ |
1 |
∫b |
f (x)dx ≤ M . |
|||
b −a |
|||||||
Позначимо |
|
|
|
a |
|
||
|
|
|
|
|
|||
|
1 |
∫b |
f (x)dx = μ , |
|
|
|
(3.3) |
|
b − a |
|
|
|
|||
|
|
a |
|
|
|
|
|
де m ≤ μ ≤ M .

Оскільки функція f (x) неперервна на [a;b], то на цьому відрізку вона набуває всіх проміжних значень між m і M , тобто знайдеться така точка ξ , що μ = f (ξ) і, згідно з (3.3),
∫b |
f (x)dx = f (ξ)(b −a) . |
|
|||
a |
|
|
|
|
|
Означення 3.1. Число |
|
||||
f (ξ) = |
1 |
∫b |
f (x)dx |
(3.4) |
|
b −a |
|||||
|
|
|
a |
|
f (x) на відрізку [a; b]. |
називається середнім значенням функції |
|||||
Геометрична інтерпретація теореми про середнє. Площа криволінійної трапеції, що обмежена неперервною лінією y = f (x) на відрізку [a;b], рівновелика площі прямокутника з
тією ж основою і висотою h , що дорівнює ординаті деякої точки ξ [a; b] (рис.4).
|
y |
|
|
|
|
y=f(x) |
|
|
f(ξ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
a |
ξ |
b x |
||||
Рис.4. Геометрична інтерпретація теореми про середнє |
|||||||
4. Інтеграл зі змінною верхньою межею |
|
|
|
|
|||
Нехай в інтегралі ∫b |
f (x)dx нижня межа a фіксована, а верхня межа b змінюється. Тоді |
||||||
a |
|
|
|
|
|
|
|
значення інтеграла залежить від b і є функцією від верхньої межі.
Оскільки верхня межа змінюється, то позначимо її через x , а змінною інтегрування нехай
буде t . Отримаємо функцію, що залежить від x , яку позначимо Φ(x) |
і назвемо інтегралом зі |
||||||||
змінною верхньою межею |
|
|
|
|
|
|
|||
Φ(x) = ∫x |
f (t)dt . |
|
|
|
|
|
|
|
(4.1) |
a |
|
|
|
|
|
|
|
|
|
Ця функція має такі властивості: |
|
|
|
|
|
|
|||
Теорема 4.1. Якщо |
f (x) |
– інтегровна на [a,b], то Φ(x) |
є неперервною функцією від x на |
||||||
цьому проміжку. |
|
|
|
|
|
|
|
||
Теорема 4.2. Якщо |
f (x) |
– неперервна функція і Φ(x) = ∫x |
f (t)dt , то |
|
|
||||
|
|
|
|
|
|
a |
|
|
|
′ |
|
|
|
|
|
|
|
|
|
Φ (x) = f (x) . |
|
|
|
|
|
|
|
|
|
˛ Надаючи аргументу x приросту |
x , матимемо |
|
|
|
|
|
|||
|
x+ x |
|
x |
x+ x |
|
|
|
|
|
Φ(x + x) = ∫ |
f (t)dt = ∫ f (t)dt + ∫ f (t)dt . |
|
|
|
|
|
|||
|
a |
|
a |
x |
|
|
|
|
|
Тоді приріст функції Φ(x) запишеться |
|
|
|
|
|
||||
|
|
|
|
x |
x+ |
x |
x |
x+ |
x |
|
ΔΦ = Φ(x + x) −Φ(x) = ∫ f (t)dt + |
∫ |
f (t)dt −∫ f (t)dt = |
∫ f (t)dt . |
|||||
|
|
|
|
a |
x |
|
a |
x |
|
Застосуємо до останнього інтеграла теорему про середнє

x+ x
ΔΦ = ∫f (t)dt = f (ξ) x , де ξ [x; x + x].
x
Знайдемо границю відношення приросту функції Φ(x) до приросту аргументу x , яка дорівнює похідній функції Φ(x) :
′ |
ΔΦ |
|
f (ξ) x |
= lim f (ξ) . |
|
Φ (x) = lim |
|
= lim |
|
|
|
x |
|
x |
|||
x→0 |
x→0 |
|
x→0 |
||
Оскільки ξ → x при |
x → 0 і |
f (x) - неперервна, то |
|||
′ |
|
= lim f (ξ) = f (x) . |
|||
Φ (x) = lim f (ξ) |
|||||
x→0 |
|
ξ→x |
|
|
|
Іншими словами теорему (4.2) можна сформулювати так: похідна від інтеграла (4.1) зі змінною верхньою межею x дорівнює значенню підінтегральної функції в точці x .
|
|
|
|
|
|
|
|
|
x |
|
можна розглядати як первісну |
|
Зауваження. Оскільки Φ (x) = f (x) , то функцію Φ(x) = ∫f (t)dt |
||||||||||||
|
′ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
функції f (x) . З (3.1) випливає, що Φ(a) = 0 , тобто Φ(x) є тією первісною функції f (x) , що |
||||||||||||
перетворюється в нуль при x = a . |
|
|
|
|
|
|
|
|
|
|||
Геометрична інтерпретація теореми 4.2. Інтеграл Φ(x) = ∫x |
f (t)dt чисельно дорівнює площі |
|||||||||||
криволінійної трапеції ABCD . |
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
y |
|
|
|
|
y=f(x) |
|
|
|
|||
|
f(ξ) |
|
|
|
|
|
|
|
|
|
|
|
|
B |
C |
|
Ф |
(x) |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|||||
|
|
Ф(x) |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
A |
|
D |
|
|
|
|
|
x |
|
|
|
a |
x |
ξ |
x+ x |
|
|||||||
|
Рис.5. Геометрична інтерпретація теореми 4.2. |
|||||||||||
Приріст ΔΦ(x) = Φ(x + x) − Φ(x) = f (ξ) |
x (згідно з теоремою про середнє) дорівнює площі |
|||||||||||
криволінійної трапеції з основою |
|
|
|
′ |
|
|
дорівнює довжині відрізка CD . |
|||||
x ; похідна Φ |
(x) = f (x) |
|||||||||||
5. Обчислення визначених інтегралів. Формула Ньютона-Лейбніца |
||||||||||||
5.1. Основна формула інтегрального числення |
|
|
|
|
|
|||||||
Якщо F(x) – довільна первісна неперевної на [a,b] функції |
f (x) , то справедлива формула |
|||||||||||
∫b |
f (x)dx = F (b) − F(a) , |
|
|
|
|
|
|
|
|
|
|
(5.1) |
a |
|
|
|
|
|
|
|
|
|
|
|
|
яка називається формулою Ньютона-Лейбніца. |
|
|
|
|
|
|
|
|||||
˛ Нехай F(x) – деяка первісна f (x) . Згідно з теоремою 4.2, функція ∫x |
f (t)dt є також |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
a |
|
первісною f (x) . Проте дві довільні первісні функції |
f (x) |
відрізняються між собою на стале |
||||||||||
число C * . Отже, |
|
|
|
|
|
|
|
|
|
|
|
|
∫x |
f (t)dt = F (x) +C * . |
|
|
|
|
|
|
|
|
|
|
|
a

Ця рівність перетворюється у тотожність при деякому значенні C * , яке знайдемо, поклавши
x = a : |
∫a |
f (t)dt = F(a) +C * , |
або 0 = F(a) + C * , звідки C* = −F(a) . Отже, |
||||||
|
|
a |
|
|
|
|
|
|
|
∫x |
f (t)dt = F (x) − F(a) . |
|
|
|
|
||||
a |
|
|
|
|
|
|
|
|
|
Вважаючи x = b , отримаємо формулу ∫b |
f (t)dt = F (b) − F(a) , або, згідно з властивістю 1 |
||||||||
|
|
|
|
|
|
a |
|
|
|
визначеного інтеграла, дістанемо (5.1) |
|
|
|
||||||
Якщо ввести позначення |
F(b) − F(a) = F(x) |
|
b , то формулу (5.1) можна записати у вигляді |
||||||
|
|||||||||
|
∫b |
|
|
|
ba . |
|
|
|
a |
|
|
|
|
|
|
|
|||
|
f (x)dx = F(x) |
|
|
(5.2) |
|||||
|
|
|
|||||||
|
|
|
|
|
|
||||
|
a |
|
|
|
|
|
|
|
|
Отже, значення визначеного інтеграла виражається різницею двох значень довільної первісної функції – у верхній та нижній межі.
Зауваження. Різниця F (b) − F (a) не залежить від вибору первісної F (x) , оскільки всі первісні відрізняються на сталу величину, яка при відніманні все одно зникає.
Формула Ньютона-Лейбніца дає зручний спосіб обчислення визначеного інтеграла у тому випадку, коли відома первісна підінтегральної функції.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
1 |
Приклад 5.1. За формулою Ньютона-Лейбніца знайти інтеграли: ∫xdx ; |
∫ex dx . |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
0 |
3 |
x2 |
|
3 |
|
9 |
|
1 |
|
|
1 x |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|||||||
а) ∫xdx = |
|
|
|
|
|
|
x |
|
|
||||||
|
|
1 |
= |
|
− |
|
= 4 |
; |
б) ∫e |
dx =e |
|
0 |
=e −1 . |
|
|
2 |
|
2 |
2 |
|
|
||||||||||
1 |
|
|
|
|
|
0 |
|
|
|
|
|||||
5.2. Заміна змінної у визначеному інтегралі
За допомогою основної формули інтегрального числення (5.1) формули теорії невизначеного інтеграла перетворюються в аналогічні формули для визначеного інтеграла, які зводять обчислення одного інтеграла до обчислення іншого, більш простого. Це стосується як методу заміни змінної, так і інтегрування частинами.
Теорема 5.1. Нехай в інтегралі ∫b |
f (x)dx функція f (x) неперервна на відрізку [a;b]. Введемо |
|||
|
|
a |
|
|
нову змінну t , поклавши x=ϕ( )t. Нехай значенню t =α за формулою |
x=ϕ( )t відповідає |
|||
значення x = a , а значенню t = β – значення x = b , тобто ϕ(α) = a , ϕ(β) = b . Тоді, |
||||
якщо: |
|
неперервно-диференційовна на [α; β]; |
|
|
1) функція ϕ(t) |
|
|||
2) складна функція f (ϕ(t)) визначена і неперервна на [α; β], то |
|
|||
b |
β |
|
|
|
∫f (x)dx = ∫f (ϕ |
′ |
|
(5.3) |
|
(t))ϕ (t)dt . |
|
|||
a |
α |
|
|
|
Зауваження. Зазначимо одну особливість цієї формули. В той час, як при обчисленні невизначеного інтеграла за допомогою заміни змінних, отримавши шукану функцію через змінну t , ми повинні були повертатись до старої змінної x , у визначеному інтегралі у цьому немає необхідності. Якщо вдасться обчислити другий інтеграл у формулі (5.3), то отримаємо деяке число, якому дорівнює перший інтеграл.
e |
ln x |
dx . |
Приклад 5.2. Обчислити: ∫ |
||
1 |
x |
|
|
|

x = et ; t = ln x
e |
ln x |
|
dx = et dt |
1 |
|
tt |
1 |
1 |
|
3 |
|
1 |
|
|
|
||
∫ |
dx = |
= ∫ |
|
et dt = ∫t |
|
dt = |
2 |
t |
|
|
= |
2 |
. |
||||
|
2 |
2 |
|||||||||||||||
x |
x =1 при t = 0 |
e |
3 |
|
0 |
3 |
|||||||||||
1 |
|
0 |
|
0 |
|
|
|
|
|
|
|
||||||
|
|
|
x = e при t =1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1
Приклад 5.3. Обчислити: ∫ 1 − x2 dx .
1 − x2 dx .
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Зробимо заміну змінних x =sin t , |
dx = cos tdt |
і встановимо нові межі інтегрування: x = 0 при |
||||||||||||||||
t = 0 ; x =1 при t = π |
. Тоді: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
π |
|
|
π |
|
|
π |
|
|
|
|
|
|
|
|
|
|
|
2 |
2 |
|
2 |
2 |
2 |
|
2 |
1 + cos 2t |
|
t |
|
sin 2t |
π |
|
π |
. |
||
∫ |
1 − x |
|
dx = ∫ |
1 −sin |
|
t cos tdt = ∫cos |
|
tdt = ∫ |
|
dt = = |
|
+ |
|
|
2 |
= |
|
||
|
|
|
2 |
2 |
4 |
4 |
|||||||||||||
0 |
|
|
0 |
|
|
0 |
|
|
0 |
|
|
|
0 |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Якщо проміжок інтегрування є симетричним відносно початку координат, то для парної функції
інтеграл запишеться ∫a |
f (x)dx =2∫a |
f (x)dx , |
|
а для непарної функції – ∫a |
f (x)dx =0 . |
|||||||||||||||||||
|
|
|
|
−a |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
−a |
|
|
|
Приклад 5.4. Обчислити інтеграл |
|
|
1 |
|
xdx |
|
. |
|
|
|
|
|
|
|
|
||||||||
|
|
|
∫ |
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
(x |
2 |
+1) |
2 |
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
−1 |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
1 |
|
|
xdx |
|
|
|
|
||
|
Оскільки функція f (x) = |
|
|
|
|
– непарна, то ∫ |
|
|
|
= 0 . |
|
|
||||||||||||
|
(x |
2 |
+1) |
2 |
|
(x |
2 |
+1) |
2 |
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
−1 |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5.3. Формула інтегрування частинами у визначеному інтегралі |
[a;b] функції. Тоді |
|||||||||||||||||||||||
Нехай u(x) |
і v(x) – неперервно-диференційовні за змінною x на відрізку |
|||||||||||||||||||||||
d(uv) =udv +vdu . Інтегруючи цю рівність по проміжку від a до b , матимемо |
||||||||||||||||||||||||
∫b d (uv) = ∫b udv + ∫b vdu , |
звідки, враховуючи, що ∫b d (uv) =uv |
|
ba , отримаємо |
|
||||||||||||||||||||
|
|
|||||||||||||||||||||||
|
|
|||||||||||||||||||||||
a |
a |
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
∫b udv = uv |
|
ba −∫b vdu . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(5.4) |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
a |
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Формула (5.4) називається формулою інтегрування частинами у визначеному інтегралі.
|
|
|
|
|
|
|
|
π |
|
|
|
|
Приклад 5.5. обчислити інтеграл |
∫2 x cos xdx . |
|
||||||||||
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
π |
|
|
|
|
|
|
|
π |
||
|
|
2 |
|
|
|
|
u = x, du = dx |
|
|
|
π |
2 |
|
|
∫x cos xdx = |
|
|
= x sin x |
|
2 |
− ∫sin xdx = |
||||
|
|
|
|
|
||||||||
|
|
|
dv = cos xdx, v =sin x |
|
||||||||
|
|
0 |
|
π |
|
|
|
|
0 |
0 |
||
|
|
|
|
|
|
|||||||
|
π |
|
π |
|
|
|
|
|
||||
|
+ cos x |
|
|
|
|
|
|
|
||||
= |
|
2 = |
−1 . |
|
|
|
|
|
||||
2 |
|
2 |
|
|
|
|
|
|||||
|
|
|
0 |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|||||
6. Наближене обчислення визначених інтегралів |
||||||||||||
Нехай треба знайти визначений інтеграл ∫b |
f (x)dx , де f (x) – деяка неперервна на [a,b] |
|||||||||||
|
|
|
|
|
|
|
|
a |
|
|
|
|
функція. У цьому розділі ми вже показали, як знайти такий інтеграл за допомогою первісної у замкнутому вигляді. Цей метод застосовується лише до досить вузького класу функцій, за межами цього класу використовують різні методи наближених обчислень. Найпростішими з них є метод прямокутників, метод трапецій та метод парабол (метод Сімпсона).
При виборі наближених методів обчислення визначеного інтеграла намагаються використати можливості сучасної обчислювальної техніки.

6.1. Метод прямокутників
Поділимо відрізок [a;b] точками a = x0 , x1 , x2 ,..., xn−1 , xn = b на n рівних частин довжиною
x = b −a |
і на кожному відрізку [xi−1 |
; xi ] виберемо середню точку ξi = |
xi−1 + xi |
( i =1, 2...n ) |
|
||||
n |
|
2 |
|
|
(рис.7). |
|
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
|
y=f(x) |
|
0 |
a ξ |
x1 |
x2 |
xi-1ξ xi |
xn-1ξ b |
x |
|
|
1 |
|
i |
n |
|
Рис.7. Ілюстрація методу прямокутників |
||||||
Тоді визначений інтеграл можна обчислити за формулою
b |
|
n |
|
|
b −a |
n |
|
b −a |
(f (ξ1 ) +... + f (ξn )), |
|
f (x)dx ≈ |
f (ξi ) |
x = |
f (ξi ) = |
|||||
∫ |
∑ |
n |
∑ |
|
|||||
|
|
|
|
n |
|||||
a |
|
i=1 |
|
|
|
i=1 |
|
|
|
яка називається формулою прямокутників. Очевидно, що чим більшим буде n , тим меншим буде крок x і права частина даватиме точніше значення інтеграла.
6.2. Метод трапецій
Очевидно, що ми отримаємо точніше значення визначеного інтеграла, якщо криву y = f (x)
наблизимо не ступінчастою лінією, як це було у формулі прямокутників, а ламаною лінією. Тоді площа криволінійної трапеції заміниться сумою площ відповідних прямокутних трапецій (рис.8)
b |
n |
f (x |
i−1 |
) + |
f (x |
) |
|
|
f (x |
0 |
) + |
f (x |
) |
|
f (x |
) + |
f (x |
2 |
) |
|
∫ f (x)dx ≈ ∑ |
|
|
i |
|
x = |
x |
|
|
1 |
|
+ |
1 |
|
|
|
+ |
||||
|
|
2 |
|
|
|
|
2 |
|
|
|
2 |
|
|
|
||||||
a |
i=1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
f (x2 ) + f (x3 ) +...
2
+ f (x1 ) + f (x2 ) +... + f
де yi = f (xi ) (i = 0, n)
|
|
f (x |
n−1 |
) + f (x |
n |
) |
|
|
f |
(x ) + f |
(x |
n |
) |
|
|||||
+ |
|
|
|
|
|
|
|
= |
x |
|
1 |
|
|
+ |
|||||
|
|
|
|
2 |
|
|
|
|
|
2 |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
(x |
|
))= |
b −a |
y |
0 |
+ y |
n |
+ y |
+... + y |
|
, |
|
|||||||
|
n |
|
|
|
|
|
|
||||||||||||
|
|
|
|
2 |
|
|
|||||||||||||
|
|
n−1 |
|
|
|
|
|
|
1 |
|
n |
|
|
|
|||||
. Зі збільшенням числа n збільшується точність цієї формули.
y |
|
|
|
|
y=f(x) |
yn |
|
|
|
|
|
|
|
|
|
|
|
yi |
|
|
|
|
|
yi-1 |
|
|
|
|
|
y0 |
|
|
|
|
|
0 |
a |
x1 |
xi-1 |
xi |
b x |
|
Рис.8. |
Ілюстрація методу трапецій |
|||
6.3. Метод парабол (формула Сімпсона)
Поділимо відрізок [a;b] на 2n однакових частин. Площу криволінійної трапеції, що відповідає першим двом відрізкам [x0 ; x1 ] та [x1; x2 ] і обмеженої кривою y = f (x) , замінимо