

4. Конечные автоматы
Цель данного занятия - освоить язык описания конечных автоматов и приобрести навыки в их анализе и взаимном преобразовании.
4.1. Общие положения
Конечный
автомат
[1]
- это набор из пяти элементов
![]() ,
,
где
![]()
алфавит внутренних состояний;
алфавит внутренних состояний;
![]() входной
алфавит (алфавит входных символов);
входной
алфавит (алфавит входных символов);
![]() выходной
алфавит (алфавит выходных символов);
выходной
алфавит (алфавит выходных символов);
функция переходов из состояния в состояние;
функция выходов.
В
теории автоматов наиболее часто
рассматриваются автоматы Мили и Мура,
у которых функции переходов имеют
одинаковый вид (![]() ),
а функции выходов существенно различны
(
),
а функции выходов существенно различны
(![]() для автомата Мили и
для автомата Мили и![]() для автомата Мура), что определяет разное
поведение автоматов. При этом решают
задачи анализа и синтеза автоматов, их
взаимных преобразований, установление
эквивалентности автоматов и др.
для автомата Мура), что определяет разное
поведение автоматов. При этом решают
задачи анализа и синтеза автоматов, их
взаимных преобразований, установление
эквивалентности автоматов и др.
4.2. Представление автомата
Для описания работы автомата чаще всего используют таблицы и графы переходов. В табл. 4.1 приведен пример представления автомата Мили, а в табл. 4.2 автомата Мура.
Таблица 4.1
-

...



...

...
...
...
...


...

Таблица 4.2
-

...


...

...
...
...
...


...

Автомат
называется полностью
определённым,
если множество пар для функций перехода
и выхода равны множеству пар
![]() .
У частично
определённого автомата функции
и
определены на множестве не всех пар
.
У частично
определённого автомата функции
и
определены на множестве не всех пар
![]() ;
в этом случае некоторые клетки не
заполнены.
;
в этом случае некоторые клетки не
заполнены.
Граф
переходов строится следующим образом.
Две вершины
![]() и
и![]() (исходное состояние и состояние перехода)
соединяются дугой, направленной от
(исходное состояние и состояние перехода)
соединяются дугой, направленной от![]() к
к![]() ,
если в автомате имеется переход из
,
если в автомате имеется переход из![]() в
в![]() (если
(если![]() ).
Для автомата Мили дуге (
).
Для автомата Мили дуге (![]() )
приписывается входной символ
)
приписывается входной символ![]() и выходной
и выходной![]() .
Для автомата Мура входной символ
.
Для автомата Мура входной символ![]() записывается внутри вершины
записывается внутри вершины
![]() или рядом с ней, а дуге приписывается
только входной символ
или рядом с ней, а дуге приписывается
только входной символ
![]() .
.
Пример 4.1. Автомат Мили A1 задан таблично (табл. 4.3) и графически (рис. 4.1).
S1 S2 S3

![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
РРис. 4.1. Граф автомата А1
Пример 4.2. Автомат Мура A2 задан таблично (табл. 4.4) и графически (рис. 4.2).
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
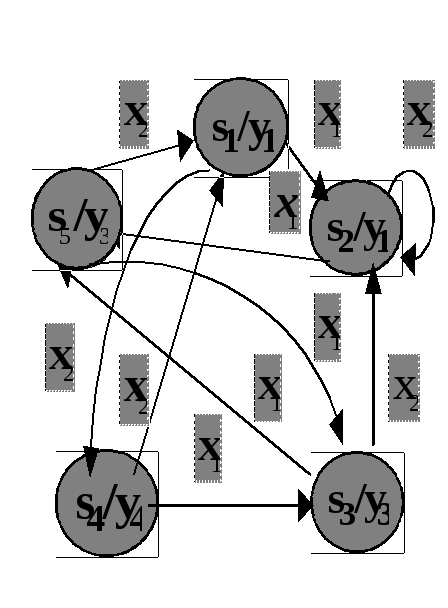
Рис. 4.2. Граф автомата А2
4.3. Взаимные преобразования автоматов
Одной из основных задач, решаемых в теории автоматов, является задача эквивалентного преобразования автомата Мили в автомат Мура либо наоборот [4].
Рассмотрим
связь между автоматами Мили и Мура. Два
автомата
![]() и
и![]() с одинаковыми входными и выходными
алфавитами называютсяэквивалентными,
если после установления их в начальной
состояния их реакции на любое входное
слово совпадают. Для любого автомата
Мили может быть построен эквивалентный
ему автомат Мура и наоборот.
с одинаковыми входными и выходными
алфавитами называютсяэквивалентными,
если после установления их в начальной
состояния их реакции на любое входное
слово совпадают. Для любого автомата
Мили может быть построен эквивалентный
ему автомат Мура и наоборот.
Преобразование автоматов связано с преобразованием их состоя-ний. На рис. 4.3 представлены преобразования для обоих случаев преобразования автоматов. Видно, что в случае а символы выхода на графе автомата Мура приписываются дуге на графе автомата Мили; в случае б в вершину sm автомата Мура нельзя поместить несколько сим-волов выхода с дуг автомата Мили, поэтому такое состояние надо "расщеплять":
Sm=(S'm, S"m), где S'm=(sm, yn) S"m=(sm, yp).
Аналогично поступают и при преобразованиях на таблицах.


![]()
![]()



![]()
![]()


![]()
![]()



![]()
![]()


![]()
![]()


![]()
![]()
![]()
![]()
![]()
![]()

![]()



![]()
![]()



![]()
![]()
![]()

Рис. 4.3. Преобразования автоматов (их состояний):
а) автомата Мура в автомат Мили; б) автомата Мили в автомат Мура
Пример
4.3.
Рассмотрим преобразование автомата
Мили АА,
заданного табл. 4.3 (графом на рис. 4.1) и
алфавитами:
![]() ,
,![]() ,
,![]() ,
в автомат Мура АВ.
Для автомата АВ
определим
множество его состояний SB
и
функцию выхода; этой информации достаточно
для описания автомата АВ.
,
в автомат Мура АВ.
Для автомата АВ
определим
множество его состояний SB
и
функцию выхода; этой информации достаточно
для описания автомата АВ.
Состояние
![]() расщепляется
в два состояния:
расщепляется
в два состояния:
![]() и
и![]() (обратите внимание на дуги, входящие в
вершину, отождествляющую состояниеS1
и выходные буквы на них
(обратите внимание на дуги, входящие в
вершину, отождествляющую состояниеS1
и выходные буквы на них
![]() ).
Для удобства переобозначим их
соответственно:
).
Для удобства переобозначим их
соответственно:![]() и
и![]() .
Аналогично поступим и с другими
состояниями. В результате получим:
.
Аналогично поступим и с другими
состояниями. В результате получим:
![]()
![]()
![]()
![]()
Функции выхода автомата АВ определяются выражениями
![]()
Согласно схеме б (рис. 4.3) получим следующие переходы:
-из
![]()
![]() и
и
![]()
![]() переход в состояние
переход в состояние
![]()
![]() ;
;
-из
![]()
![]() и
и
![]()
![]() переход в состояние
переход в состояние
![]()
![]() ;
;
-из
![]()
![]() переход
в состояние
переход
в состояние
![]()
![]() ;
;
-из
![]()
![]() переход
в состояние
переход
в состояние
![]()
![]() ;
;
-из
![]()
![]() и
и
![]()
![]() переход в состояние
переход в состояние![]()
![]() ;
;
-из
![]()
![]() и
и
![]()
![]() переход в состояние
переход в состояние![]()
![]() ;
;
Табличное и графическое представления полученного автомата Мура АВ приведены в табл. 4.5 и на рис. 4.4.
Таблица 4.5
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|


![]()
![]()


![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()

![]()
![]()










Рис. 4.4. Граф автомата Мура АВ
Пример 4.4. Рассмотрим преобразование автомата Мура А2, задан-ный табл. 4.4, в автомат Мили A'2. Поскольку оно простое, приведём готовый результат (табл. 4.6); граф можно построить самостоятельно.
Таблица 4.6