

Пичугин. Лабы. Реш / 1 вар17
.docМинистерство образования и науки Украины
Одесский национальный политехнический университет
Кафедра компьютеризированных систем управления
Лабораторная работа
на тему:
«Синтез разомкнутой оптимальной по быстродействию системы и ее исследование на модели»
по курсу
«Оптимальные и адаптивные системы»
Выполнила: ст. гр. АТ-001
Проверила: доц. Трофименко Т.Г.
Одесса 2006
Цель работы: построение замкнутой автоматической системы, оптимальной по быстродействию, и её исследование с помощью программного пакета Mathlab. Основная задача работы – определение оптимального алгоритма как функции измеряемых координат системы.
Теретические сведения.
Нахождение оптимальных по быстродействию алгоритмов управления различными объектами наиболее целесообразно осуществлять с применением принципа максимума.
Заданная С–часть системы описывается следующим дифференциальным уравнением:
![]() (1.1)
(1.1)
На управляющее воздействие накладывается ограничение:
![]()
Критерий оптимальности имеет вид:
 (1.2)
(1.2)
Требуется найти такое управление u(t), при котором время перехода объекта из состояния yo=0 в состояние yn=2.2 было минимальным.
Перейдем в уравнении (3.1) от второго порядка к первому путем замены переменной:
Т.к. критерий оптимальности (3.2) не содержит в явном виде управление, то отпадает необходимость введения новой дополнительной переменной. В результате получим следующую систему уравнений:
 (1.3)
(1.3)
Составим функцию Понтрягина на основании системы (1.3):
 (1.4)
(1.4)
В соответствии с принципом максимума управление будет оптимальным, если функция Н приобретает максимальное значение. Для определения такого управления необходимо из (1.4) определить частную производную функции H по u и приравнять нулю, т.е.
![]() (1.5)
(1.5)
Для выполнения
равенства (1.5) необходимо, чтобы
![]() .
Это противоречит теореме Понтрягина.
Поэтому, чтобы функция Н
имела максимум, необходимо управляющее
воздействие брать на границах допустимого
значения, т.е. чтобы
.
Это противоречит теореме Понтрягина.
Поэтому, чтобы функция Н
имела максимум, необходимо управляющее
воздействие брать на границах допустимого
значения, т.е. чтобы
![]() при
при
![]() и
и
![]() при
при
![]() .
Отсюда оптимальный алгоритм управления
приобретает вид:
.
Отсюда оптимальный алгоритм управления
приобретает вид:
![]() (1.6)
(1.6)
Для определения
функции
![]() составляется следующая система уравнений:
составляется следующая система уравнений:
 (1.7)
(1.7)
Из (1.7) получим:
 (1.8)
(1.8)
Решением системы (1.8) является:
![]() (1.9)
(1.9)
Подставляя (1.9) в (1.6), получаем оптимальный алгоритм управления:
![]() (1.10)
(1.10)
В соответствии с
(1.10) управляющее воздействие скачком
принимает значения
![]() или
или
![]() .
Это уравнение дает только качественную
сторону изменения управляющего
воздействия. Вместе с тем, при проектировании
системы нужно знать и количественные
характеристики, такие, как количество
интервалов максимального значения
управляющего воздействия и моменты
переключения этого воздействия.
Количество интервалов легко определить,
пользуясь теоремой об n
– интервалах, основное содержание
которой состоит в следующем: если С-часть
системы описывается линейным
дифференциальным уравнением n-го
порядка с постоянными коэффициентами
и корни его характеристического уравнения
отрицательные или нулевые, то количество
интервалов максимального значения
управляющего воздействия должно быть
n, а знаки на интервалах должны чередоваться
(n-1)
раз.
.
Это уравнение дает только качественную
сторону изменения управляющего
воздействия. Вместе с тем, при проектировании
системы нужно знать и количественные
характеристики, такие, как количество
интервалов максимального значения
управляющего воздействия и моменты
переключения этого воздействия.
Количество интервалов легко определить,
пользуясь теоремой об n
– интервалах, основное содержание
которой состоит в следующем: если С-часть
системы описывается линейным
дифференциальным уравнением n-го
порядка с постоянными коэффициентами
и корни его характеристического уравнения
отрицательные или нулевые, то количество
интервалов максимального значения
управляющего воздействия должно быть
n, а знаки на интервалах должны чередоваться
(n-1)
раз.
Таким образом, число интервалов определяем по корням характеристического уравнения С-части системы.
Дифференциальное уравнение, описывающее С-часть системы:
![]()
составим характеристическое уравнение:
 (1.11)
(1.11)
Из (1.11) и теоремы
об n
– интервалах можно сделать вывод, что
алгоритм управления будет состоять из
двух интервалов управления
![]() .
.
Определим моменты
переключения
![]() оптимального
управляющего воздействия.
оптимального
управляющего воздействия.
Решение (3.1) на втором интервале управления имеет вид:
![]() (1.12)
(1.12)
где
![]()
![]() - постоянные интегрирования на втором
интервале
- постоянные интегрирования на втором
интервале
![]() - корень характеристического уравнения
- корень характеристического уравнения
Используя
условия на конец управления при
![]() получим систему уравнений:
получим систему уравнений:
 (1.13)
(1.13)
Из системы (1.13) находим:
 (1.14)
(1.14)
Решение (1.1) на первом интервале управления:
![]() (1.15)
(1.15)
где
![]()
![]() - постоянные
интегрирования на первом интервале
- постоянные
интегрирования на первом интервале
С учетом начальных
условий при
![]() получим:
получим:
 (1.16)
(1.16)
Из системы (3.16) находим:
 (1.17)
(1.17)
Стыкуем решение в момент переключения t1:
 (3.18)
(3.18)
Подставим (1.14) и (1.17) в (1.18 ), получим уравнения для определения моментов переключения:
 (1.19)
(1.19)
Из второго уравнения системы (1.19) получим:
![]() (1.20)
(1.20)
Подстановка (1.20) в первое уравнение системы (1.19) позволяет записать следующее:
![]() (1.21)
(1.21)
Преобразуем (3.21)
и умножив левую и правую части на
![]() получим:
получим:
![]() (1.22)
(1.22)
Введем обозначение
![]() :
:
![]() (1.23)
(1.23)
Подставим в (3.23) численные значения коэффициентов:
![]()
![]() (1.24)
(1.24)
Решением полученного
квадратного уравнения (1.24) является
![]()
Т.к. экспонента в
положительной степени всегда больше
единицы, то решением уравнения (1.24)
является x1.
Поэтому,
![]() .
Тогда:
.
Тогда:
На рис. 1.1 приведено оптимальное управляющее воздействие, обеспечивающее перевод разомкнутой системы в заданное состояние за минимальное время.
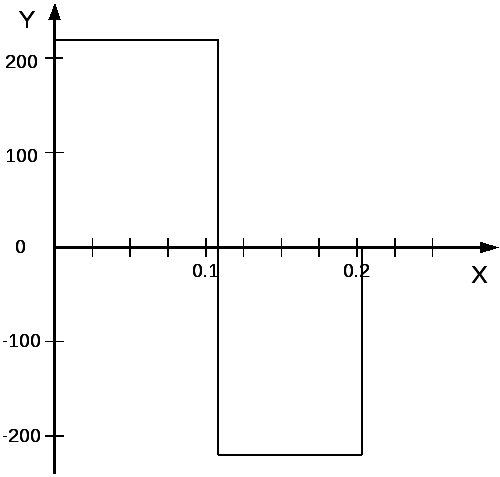
Рис. 1.1 График оптимального управляющего воздействия
Структурная схема оптимальной по быстродействию системы включает в себя все звенья системы и представляет математическую модель протекающих в ней процессов. Для составления структурной схемы были использованы уравнения динамики С – части, управляющего устройства и синтезированный алгоритм управления контура оптимизации. Взаимные связи между звеньями системы соответствуют полученной ранее функциональной схеме и обеспечивают требования оптимальности по быстродействию системы при отработке вводимого задающего воздействия.
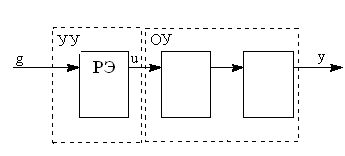
g(t) - задающее воздействие; y(t) - вектор состояния системы; u(t) - управляющее воздействие; УУ - управляющее устройство; ОУ - объект управления, РЭ - релейный элемент.
Расчет и построение переходного процесса проектируемой системы выполнялся для двух случаев. В первом случае рассматривалась оптимальная по быстродействию система с использованием принципа комбинированного управления при отключенном управляющем устройстве. Контур оптимизации при этом осуществляет непосредственное воздействие на управляемый объект, когда система является разомкнутой.
Во втором случае в рассматриваемой системе управления контур оптимизации отключен, система является замкнутой, но не оптимальной по быстродействию.
Решение уравнения
(1.1) для первого интервала
![]() с учетом найденных постоянных
интегрирования имеет вид:
с учетом найденных постоянных
интегрирования имеет вид:
![]() (1.25)
(1.25)
С учетом численных значений параметров уравнение (1.24) записывается в следующем виде:
![]()
Результаты вычислений сведены в таблицу 1.
Таблица 1
|
t |
0 |
0,012 |
0,024 |
0,036 |
0,048 |
0,052 |
0,064 |
0,086 |
0,098 |
0,112 |
|
Y(t) |
0 |
0,013 |
0,0499 |
0,111 |
0,196 |
0,23 |
0,346 |
0,615 |
0,793 |
1,026 |
Решение уравнения
(1.1) для второго интервала при t=t1
и длительности
![]() имеет вид:
имеет вид:
![]() (1.26)
(1.26)
Определим постоянные интегрирования. С этой целью был рассмотрен условно момент времени t1=0. Тогда из (1.26) следуют равенства:
![]() (1.27)
(1.27)
Величина yс
соответствует моменту переключения.
Значения
![]() в (1.27) находятся с помощью уравнений
(1.14)
в (1.27) находятся с помощью уравнений
(1.14)
 ,
,
в которых вместо t2 используется t. В результате подстановки получим:
![]()
Подставляя полученные численные значения постоянных интегрирования в уравнение (1.26). Получим:
![]()
Таблица 2
-
t
0,015
0,03
0,045
0,06
0,075
0,091
Y(t)
1,259
1,453
1,6
1,71
1,77
1,8
Производная в момент времени t2 :
![]()
Таким образом, условия в конце управления выполняются.
Используя данные таблиц 1 и 2, строится переходной процесс оптимальной по быстродействию системы (рис.1.2).
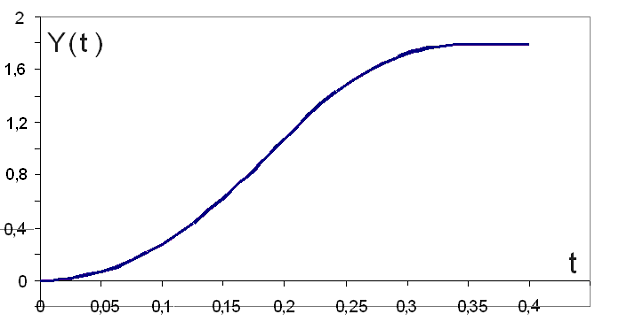
Рис. 1.2 Переходной процесс оптимальной по быстродействию системы
Построение переходной характеристики было проведено, используя приложение "Simulink" пакета "MatLab". Схема и результат моделирования представлены на рис. 1.3 и 1.4 соответственно.
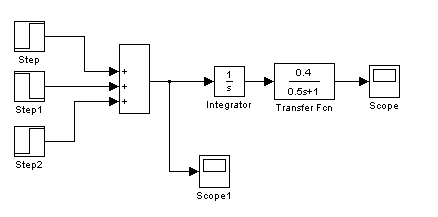
Рис. 1.3 Структурная схема системы оптимальной по быстродействию
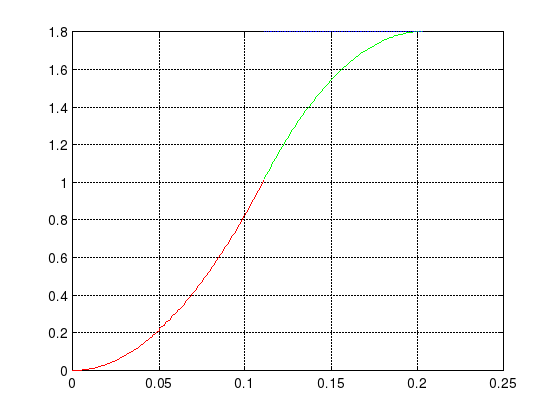
Рис. 1.4 Переходной процесс системы оптимальной по быстродействию.
Выводы:
в ходе лабораторной работы была
синтезирована структурная схема
замкнутой системы, оптимальной по
быстродействию, проведено
исследование с помощью программного
пакета Mathlab.
А также были получены переходные процессы
системы при значениях постоянной времени
объекта
![]() и
и
![]() .
Основная
задача работы – определение оптимального
алгоритма как функции измеряемых
координат системы.
.
Основная
задача работы – определение оптимального
алгоритма как функции измеряемых
координат системы.
Литература
-
Воронов А. А. (ред.) Теория автоматического управления: Учеб. для вузов. Ч. П. – М.: Высш. шк., 1986.-504с.:ил.
-
Олейников В.П., Зотов Н.С., Пришвин А. М. Основы оптимального и экстремального управления. – М.: Высш. шк., 1969. – 296 с.
-
Пичугин Е.Д. Методические указания к лабораторной работе «Синтез оптимальной по быстродействию разомкнутой системы и ее исследование на модели», Одесса, ОНПУ, 2004.