

Пичугин. Лабы. Реш / Лаба 2
.docМинистерство образования и науки Украины
Одесский национальный политехнический университет
Институт компьютерных систем
Кафедра компьютеризированных систем управления
ЛАБОРАТОРНАЯ РАБОТА №2
по дисциплине
«ОПТИМАЛЬНЫЕ И АДАПТИВНЫЕ СИСТЕМЫ»
на тему
«Синтез оптимальной по быстродействию замкнутой
системы и её исследование на модели»
Вариант № 2
Выполнил
студент группы АТ-022
Проверила:
Трофименко Т.Г.
2006
Цель работы: аналитическое построение замкнутой оптимальной по быстродействию системы и её исследование на модели.
1 Построение функции переключения и фазовой траектории
Реализация разомкнутых систем, оптимальных по быстродействию, затруднительна, когда к управляемому объекту прикладываются внешние возмущающие воздействия, вызывающие необходимость изменения моментов переключения.
В замкнутых оптимальных по быстродействию системах возможна коррекция моментов переключения в зависимости от внешних возмущающих воздействий или изменений характеристик управляемого объекта. Рассмотрим синтез замкнутой системы, оптимальной по быстродействию, методом фазовой плоскости. Управляемый объект описывается уравнением:
![]() (1)
(1)
Приведем данное уравнение к двум уравнениям:
![]() (2)
(2)
![]() (3)
(3)
где
 ,
откуда а1=0.115;
а2=0,885.
,
откуда а1=0.115;
а2=0,885.
k1k2 = k0=2.0; k1=2, k2= k0 /2=1.
Запишем решение уравнения (2), приняв, что при t=0 x= x0:
![]() .
(4)
.
(4)
Подставим (4) в (3), получим:
![]() ,
,
откуда получим
 .
(5)
.
(5)
После определения постоянной интегрирования С2 из условия, что в момент t0=0 y=y0 , перепишем (5):
 .
(6)
.
(6)
Используем (4) и (6) для построения линии переключения и фазовой траектории, для которой на интервале 0 t t1 (при x0=y0=0) указанные уравнения примут вид:
 (7)
(7)
Для интервала от t1 до t2, изменяя t от 0 до t=t2 - t1 получим значения x и y для второго участка:
 (8)
(8)
где x1 и y1 значения x и y, получаемые из (7) в момент t=t1.
x1= 420.991; y1= 208.733
x = 172.3253; y = 228.475
Вид линии переключения и фазовой траектории соответствующий равенствам (7) и (8) приведен на рисунке 1:
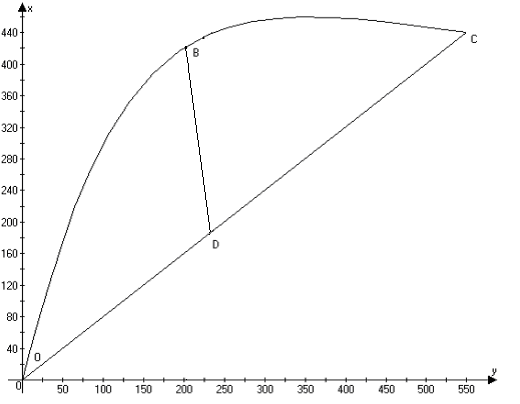
Рисунок 1 - Линия переключения и фазовая траектория
 (9)
(9)
Траектория ОВС – линия переключения, характеризующая первый интервал управляющего воздействия, траектория BD соответствует второму интервалу. Точка В соответствует моменту переключения t1 управляющего воздействия, а точка D – моменту отключения t2.
-
Построение оптимального автомата
Для построения структурной схемы замкнутой системы, оптимальной по быстродействию можно воспользоваться синтезом оптимального по быстродействию автомата. При этом применяются жесткие обратные связи, дающие возможность получить знакопеременную функцию переключения, преобразуемую затем с помощью реле в оптимальный алгоритм. Структурная схема такой системы приведена на рисунке:

Рисунок 2 –
Структурная схема оптимального по
быстродействию автомата
В соответствии с рисунками 1 и 2 для траектории BD составим уравнения, в которых значения переменных x и y определяются как координаты точек B и D, т.е.
 (10)
(10)

Из системы уравнений (3.35) находятся значения коэффициентов Кос1 и Кос2:
Кос1=0.292
Кос2=0.446
Используя пакет MATLAB, моделируем работу данной схемы (рис.3):

Рисунок 3 - Cхема оптимального по быстродействию автомата
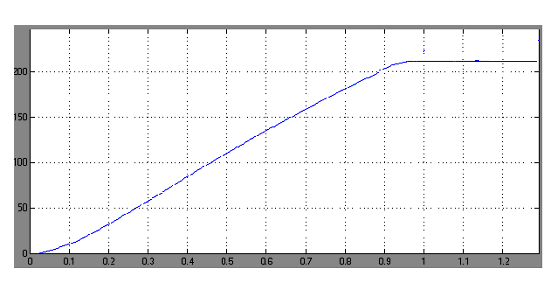
Рисунок 4 - Переходной процесс замкнутой оптимальной
по быстродействию системы
Выводы: в ходе выполнения лабораторной работы была построена замкнутая оптимальная по быстродействию система. Произведено моделирование, по данным которого можно сделать заключение о правильности полученных результатов.
Список литературы
-
Александров А.Г. Оптимальные и адаптивные системы: Учеб. пособие.- М.: Высш. шк., 1989 – 263с.: ил.
-
Воронов А.А. Теория автоматического управления: Учеб. для вузов. Ч.П. – М.: Высш.шк., 1986 – 504 с.: ил.
-
Олейников В.А., Зотов Н.С., Пришвин А.М. Основы оптимального и экстремального управления. – М.: Высш.шк., 1969. – 296 с.
-
Ротач В.Я. Расчет динамики промышленных автоматических систем регулирования. – М.: Энергия, 1973. – 440 с.
-
Чураков Е.П. Оптимальные и адаптивные системы: Учеб. пособие.- М.: Энергоатомиздат, 1987 – 256 с.: ил.