

Sistemy_shirokopolosnoy_radiosvyazi_2009
.pdf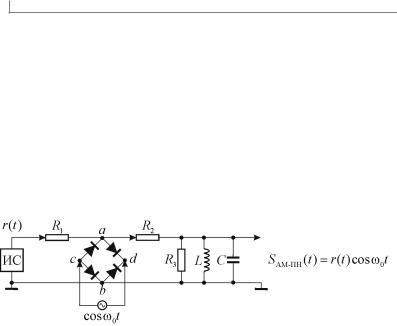
250 Глава 7 | Сигнально-кодовые конструкции. (Треллис-модуляция)
При формировании АФМ-сигналов в декартовой системе координат (рис. 7.1, а) передаваемые двоичные символы поступают на цифроаналоговые преобразователи (ЦАП) блоками длиной k log2 m . Вырабатываемые ЦАП сигналы ai и bi модулируют квадратурные составляющие несущего колебания в балансных модуляторах (БМ). В схеме формирования АФМ-сигналов, заданных в полярной системе координат (рис. 7.1, б), ЦАП вырабатывает из двоичных блоков величины i и Ui для модуляции несущей последовательно в фазовом (ФМ) и в амплитудном (АМ) модуляторах.
Схема балансного модулятора (БМ), например, кольцевого с диодным ключом, представлена на рис 7.2.
Рис. 7.2. Балансный (кольцевой) модулятор с диодным ключом для получения амплитудно — модулированных сигналов с подавленной несущей — АМ-ПН
Каждый кольцевой балансный модулятор на схеме рис 7.1, а формирует АМ-сигнал с подавленным несущим колебанием (АМ-ПН). Вся эта схема с фазосдвигающей цепочкой на / 2 формирует сигнал однополосной амплитудной модуляции (одна боковая полоса) с подавленной несущей (ОБП-ПН), который в общем случае можно представить выражением
SОБП ПН (t) r(t)cos( 0t 0 ) rˆ(t)sin( 0t 0 ) ,
где знак плюс соответствует однополосному сигналу с нижней боковой полосой, а знак минус — с верхней, функция rˆ(t) является преобразованием Гильберта сообщения r(t) .
В общем случае задача синтеза оптимального ансамбля АФМ-сигналов сводится к задаче плотнейшей укладки сфер (или окружностей) [8] в заданном объеме n -мерного пространства — рис. 7.3.

7.3. Правила и схемы формирования КАМ-сигналов 251
Рис. 7.3. Ансамбли АФМ-сигналов: а — расположение сигнальных точек в вершинах правильных треугольников (треугольных сетей); б — расположение сигнальных точек в вершинах квадратных сетей; в — круговые расположения сигнальных точек
При синтезе АФМ-сигналов нужно так расположить сигнальные точки, чтобы собственные области каждого сигнала были одинаковы по объему или по площади. Собственная область сигнала — это область правильного приема сигнала. Для дискретных сообщений вероятность правильного приема есть вероятность попадания конца вектора принятого сигнала y(t) Si (t) n(t) в собственную область Gi . Большинство ансамблей АФМ-сигналов найдены эвристическим методом: на основе треугольной сети, квадратной сети и концентрических круговых расположений (рис. 7.3).
7.3. Правила и схемы формирования КАМ-сигналов
Манипуляционные коды Грея. Поскольку соотношение (7.5) есть квадратурное представление сигнала, то другое название амплитуднофазовой модуляции — квадратурная амплитудная модуляция (КАМмодуляция), при этом АФМ-сигналы называют часто КАМ-сигналами. Простейшая базовая схема квадратурного модулятора — это схема формирования сигналов ФМ-4 — рис. 7.4.
Из анализа алгоритма работы схемы модулятора ФМ-4 следует, что двоичный цифровой поток данных (ЦПД) от источника сообщений
(ИС) разбивается в модуляторе на пакеты i { i,1, i,2 }, i {0,1} размера k 2 (две триггерные ячейки памяти T1 и T2 ). Каждому па-
кету ставится в однозначное соответствие ( ) свой сигнал по схеме

252 Глава 7 | Сигнально-кодовые конструкции. (Треллис-модуляция)
i Si , |
i 1,2k . |
(7.8) |
Рис. 7.4. Схема квадратурного модулятора сигналов ФМ-4
Ясно, что общее число правил кодирования 2k ! 22! 24 . Окончательный выбор вида манипуляционного кода (7.8) осуществляется из следующих соображений. Наиболее часто ошибки в различении сигналов происходят за счет переходов в области соседних сигналов (сигналы с минимальным расстоянием Евклида dE ), следовательно, двоичные последовательности (пакеты) сообщений, приписываемые соседним сигналам, должны отличаться наименьшим числом двоичных символов, т. е. иметь минимальное расстояние Хэмминга dX . Этому условию практически отвечает манипуляционный код на основе кода Грея. Коды Грея (или рефлексные коды) широко используются в задачах аналого-дискретных преобразований и обладают тем свойством, что каждые два соседние кодовые слова отличаются лишь на одну единицу, т. е. расстояние Хэмминга между
ними dX 1 .
Строятся коды Грея таким образом. Пусть натуральное десятичное число N представлено истинным двоичным кодовым словом A , т. е. (N )10 (A)2 . Тогда соответствующее кодовое слово кода Грея определяется по следующему конструктивному правилу:
A A 1 , |
(7.9) |
где символ означает операцию поэлементного суммирования по модулю 2, а выражение A 1 означает нециклический сдвиг вправо на один элемент двоичного слова A с последующим удалением младшего разряда и восстановлением нулевого значения старшего разряда (слева).
Пример. Пусть десятичное число (12)10 (1100)2 , тогда соответствующее кодовое слово кода Грея

7.3. Правила и схемы формирования КАМ-сигналов 253
|
|
1 1 0 |
0 |
1 0 1 0. |
|
|||||
|
|
|
0 |
1 |
1 |
0 |
|
|
|
|
В табл. 7.2 построен код Грея длины n 4 . |
|
Таблица 7.2 |
||||||||
|
|
|
|
|
|
|
|
|
|
|
Десятичные |
Истинный |
|
|
|
|
Десятичные |
|
Истинный |
|
|
двоичный |
Код Грея |
|
двоичный |
Код Грея |
||||||
числа |
|
числа |
|
|||||||
код |
|
|
|
|
|
|
код |
|
||
|
|
|
|
|
|
|
|
|
||
0 |
0000 |
|
0000 |
|
|
8 |
|
1000 |
1100 |
|
1 |
0001 |
|
0001 |
|
|
9 |
|
1001 |
1101 |
|
2 |
0010 |
|
0011 |
|
|
10 |
|
1010 |
1111 |
|
3 |
0011 |
|
0010 |
|
|
11 |
|
1011 |
1110 |
|
4 |
0100 |
|
0110 |
|
|
12 |
|
1100 |
1010 |
|
5 |
0101 |
|
0111 |
|
|
13 |
|
1101 |
1011 |
|
6 |
0110 |
|
0101 |
|
|
14 |
|
1110 |
1001 |
|
7 |
0111 |
|
0100 |
|
|
15 |
|
1111 |
1000 |
|
Сигнальное созвездие. Пользуясь геометрической трактовкой, каждый КАМ-сигнал можно изобразить вектором в n -мерном сигнальном пространстве. Отмечая только концы векторов, получаем изображение сигнала в виде сигнальной точки (рис. 7.3), координаты которой определяются значениями пары (ai ,bi ) . Совокупность сигнальных точек образует так называемое сигнальное созвездие (signal constellation). На рис. 7.5 показан пример сигнального созвездия ФМ-4.
01 |
00 |
00 S1(t) , |
|
|
01 S2 (t) , |
|
|
11 S3 (t) , |
11 |
10 |
10 S4 (t) . |
Рис. 7.5. Сигнальное созвездие ФМ-4 на основе кода Грея длины n 2
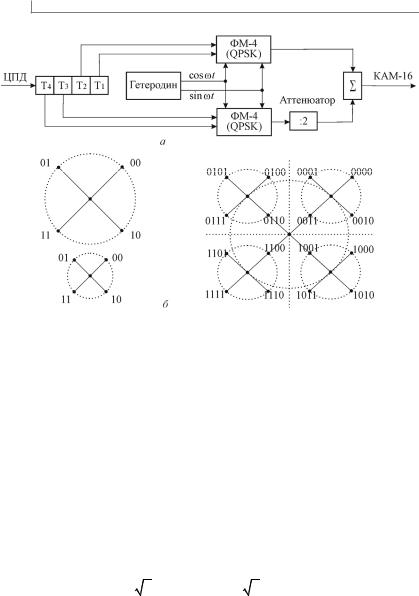
Для построения ансамблей сигналов КАМ-16, КАМ-32, , КАМ-512 на практике часто используют метод наложенной модуляции, или по-другому, метод суперпозиции. Например, используя два одинаковых модулятора ФМ-4 (рис. 7.4), построим схему модулятора КАМ-16 — рис. 7.6.
254 Глава 7 | Сигнально-кодовые конструкции. (Треллис-модуляция)
Рис. 7.6. Схема модулятора КАМ-16 — а и сигнальное созвездие КАМ-16 — б
7.4. Помехоустойчивость сигналов КАМ и ФМ
На основании спектральной теории сигналов нетрудно установить, что при равном числе точек m в сигнальном созвездии спектр сигналов КАМ- m идентичен спектру сигналов ФМ- m . Однако помехоустойчивость систем КАМ и ФМ различна. Из теории потенциальной помехоустойчивости В. А. Котельникова следует, что предельная помехоустойчивость системы радиосвязи зависит от минимального расстояния Евклида dE между соседними сигналами при прочих равных условиях. Проведя геометрическое рассмотрение и анализ сигнального созвездия КАМ- m при условии, что m 2L , L — число уровней модуляции, находим
dКАМ |
2 / (log2m 1) |
2 / (L 1), |
(7.10) |
аналогично для ФМ
dФМ 2sin( / m), |
(7.11) |
7.5. Алгоритм работы и схема универсального демодулятора ФМ-сигналов 255
где m — число фаз.
При большом числе m сигналов в ансамбле вероятность ошибки в основном зависит от минимального расстояния dE между ближайшими сигнальными точками. Поэтому сравнение ансамблей удобно
проводить по коэффициенту помехоустойчивости |
|
|||||
|
dE |
|
dE |
, |
(7.12) |
|
EС / log2m |
Eбит |
|||||
|
|
|
|
|||
где EС — энергия m -ичного сигнала.
Из анализа выражений (7.10) и (7.11) следует, что системы КАМ предпочтительнее систем ФМ. Например, при значении
m 16 (L 4) |
соответствующие расстояния Евклида: dКАМ 0,471 , |
а dФМ 0,396 |
. При значении m 8 системы КАМ-сигналов обеспе- |
чивают выигрыш в средней энергии по сравнению с системами ФМсигналов. Например, для фиксированного значения вероятности ошибки pош 10 5 и m 32 значение выигрыша составляет 7,1 дБ.
Очевидно, что применение АФМ-сигналов требует высокой линейности и стабильности параметров приемопередающего тракта, а также линейности и достаточного амплитудного диапазона всего канала связи. В то же время ФМ-сигналы допускают исключительно простую техническую реализацию демодулятора оптимального различения этих сигналов, как это показано в следующем подразделе.
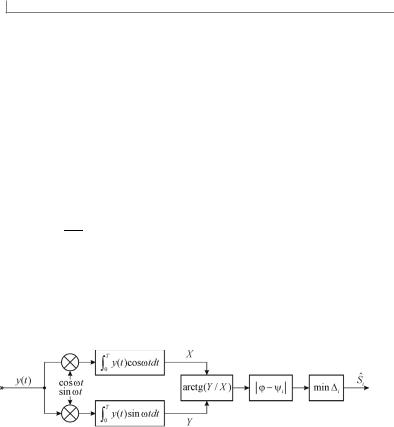
7.5.Алгоритм работы и схема универсального демодулятора ФМ-сигналов
Реализация оптимального приема АФМ-сигналов плотнейшей укладки во многих случаях представляет значительные трудности. Поэтому поиск подходящих ансамблей часто обусловлен соображениями простоты устройств формирования и обработки сигналов на приеме. Рассмотрим алгоритм построения экономичных схем демодуляторов ФМ-сигналов. Из анализа соотношения (7.7) следует, что каждый ФМ-сигнал полностью определяется своей фазой i 2 i / m , т. е. является однопараметрическим сигналом. Следовательно, задача различения сигналов может быть сведена к задаче максимально правдоподобного оценивания одного параметра принятого в условиях
помех наблюдаемого процесса y(t) S |
(t |
) n(t), i 1 m |
, |
0 t T . |
i |
, |
, |
|
7.6. Сигнально-кодовые конструкции (треллис-модуляция) 257
высокоскоростных протоколах сигналы КАМ используются совместно с помехоустойчивыми сверточными кодами. Сочетание методов многопозиционной модуляции и помехоустойчивого кодирования дает возможность повысить либо энергетическую эффективность без уменьшения частотной, либо частотную эффективность без снижения энергетической, а в ряде случаев оба параметра.
Задача заключается в формировании сигнальных последовательностей, которые можно достаточно плотно разместить в многомерном пространстве (для повышения частотной -эффективности) и в то же время разнести на достаточно большие расстояния (для обеспечения высокой энергетической -эффективности). Такие последовательности, построенные на базе помехоустойчивых кодов и многопозиционных сигналов с плотной упаковкой, называются сигнальнокодовыми конструкциями — СКК, или треллис-модуляцией (Trellis Coded Modulation). Характер обмена между и эффективностью для СКК в зависимости от роста их объема m поясняется с помощью табл. 7.3.
Таблица 7.3
Сигнально-кодовые конструкции
Сверточные коды |
Многопозиционные сигналы |
||
|
|
|
|
|
|
|
|
Заметим, что задача поиска наилучшей СКК является одной из наиболее сложных задач общей теории связи. Современные высокоскоростные протоколы модуляции (V. 32, V. 32bis, V. 34 и др.) предполагают обязательное применение сигнально-кодовых конструкций. Все применяемые сегодня СКК используют высокоскоростные свер-
точные коды вида (k0 /n0 ) (n0 1/n0 ) .
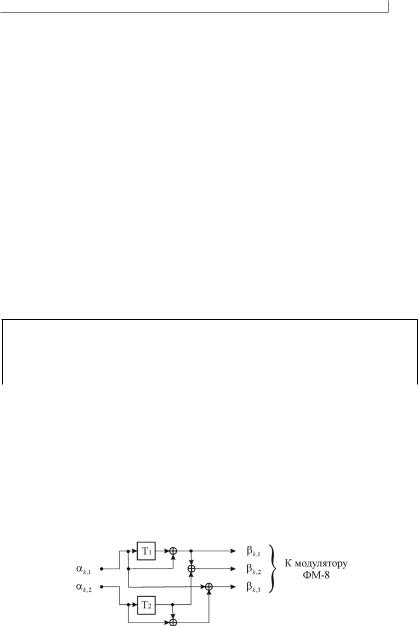
Типичный сверточный код, применяемый совместно с модулятором ФМ-8, имеет относительную скорость k0 / n0 2 / 3 (рис. 7.8).
258 Глава 7 | Сигнально-кодовые конструкции. (Треллис-модуляция)
Рис. 7.8. Схема кодера сверточного (2/3) -кода
Каждый сверточный код (СК) можно задать с помощью: схемы; уравнений кодирования; импульсной характеристики; диаграммы состояний и решетчатой диаграммы [2,4]. Основной вопрос, на который нужно ответить при построении СК, это какова его корректирующая способность.
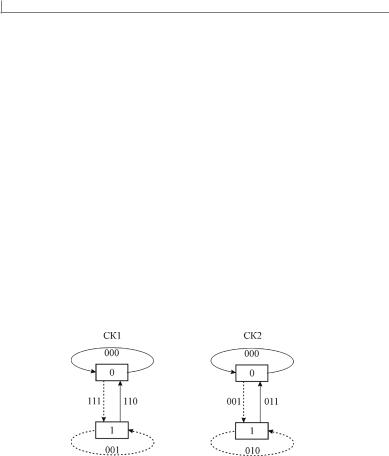
Изложим простой метод нахождения корректирующей способности СК. Корректирующая способность СК определяется его свободным расстоянием dСВ 2t 1 , т. е. минимальным суммарным весом двух или более ребер решетчатой диаграммы при нетривиальном переходе кодера из состояния «0» в состояние «0». Для решения этой задачи будем считать, что кодер (рис. 7.8) состоит из двух параллельно соединенных парциальных кодеров соответственно по первому входу и по второму входу. Импульсная характеристика первого парциального сверточного кода (СК1): h1(n) 111110 , а второго — h2 (n) 001011 . На рис. 7.9 построены диаграммы состояний [2,4] парциальных кодов СК1 и СК2.
Рис. 7.9. Диаграммы состояний парциальных кодов СК1 и СК2, построенных на основе сверточного кода рис. 7.8
Поскольку рассматриваемый СК (рис. 7.8) может принимать всего 4 состояния, и при этом за один такт работы возможен переход в любое из состояний, то для нахождения минимального свободного расстояния достаточно рассмотреть сумму весов различных пар ребер (выходных кадров) решетчатой диаграммы (при осуществлении нетривиальных переходов кодера из состояния «0» в состояние «0»), как это показано на схеме рис. 7.10.