

Sistemy_shirokopolosnoy_radiosvyazi_2009
.pdf4.9. Классы минимаксных БФМ-сигналов на основе совершенных двоичных решеток 145
характеризует выходной эффект коррелятора или согласованного фильтра с линейным детектором.
Свойство инвариантности объема функции неопределенности является наиболее важным ограничением, накладываемым на функцию неопределенности, и состоит в том, что двойной интеграл от квадрата модуля комплексной огибающей корреляционной функции равен единице, т. е.
|
|
|
||||
|
|
|
R( , f ) |
|
2 d df 1 , |
(4.53) |
|
|
|||||
|
|
|
||||
и не зависит от формы сигнала (принцип неопределенности).
На рис. 4.8 построена в соответствии с (4.52) поверхность функции неопределенности вида R( ,2 f ) одиночного радиоимпульса (рис. 4.7).
Функция R( , f )2 весьма удобна для характеристики остроты пиков корреляционной функции. Тело, заключенное между этой поверхностью и координатной плоскостью , f , называется телом
неопределенности. Физически функция R( , f )2 характеризует выходной эффект коррелятора или согласованного фильтра с квадратичным детектором.
Рис. 4.8. Поверхность неопределенности R( ,2 f ) радиоимпульса прямоугольной формы

146 Глава 4 | Системы бинарных фазоманипулированных сигналов. БФМ-сигналы
Сигналы с бинарной фазовой модуляцией. Напомним, что бинарными фазоманипулированными сигналами (БФМ-сигналами) называются сигналы, которые представляют последовательность импульсов одинаковой (прямоугольной) формы, следующих друг за другом с интервалом 0 , как это показано на рис. 3.4. Амплитуда, фаза и запаздывание k -го импульса обозначаются соответственно U0 , k , tk (k 1) 0 . Число импульсов в сигнале n . Длительность сигнала T n 0 . Энергия элементарного единичного импульса численно равна E0 0 . Общее выражение, описывающее один период сигнала с бинарной фазовой модуляцией, имеет вид
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S(t) |
|
U |
0 |
rect t (k 1) cos( t |
k |
) |
, 0 t T , |
(4.54) |
||||||||
|
|
|
|
|
|
|
0 |
0 |
|
|
|
|
|
|||
|
k 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
rect[t (k 1) 0 |
|
|
1 при (k 1) |
|
|
t k , |
(4.55) |
||||||||
|
] |
|
0 |
|
|
|
0 . |
|||||||||
|
|
|
|
|
|
|
|
|
0 при других t. |
|
|
|
||||
Комплексная огибающая сигнала (4.54) по определению равна |
||||||||||||||||
|
|
|
|
n |
|
|
|
|
|
|
|
|
j k |
|
|
|
|
|
|
|
U |
|
rect t (k 1) |
e |
. |
(4.56) |
|||||||
|
|
U(t) |
0 |
|
||||||||||||
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|||
k 1
Наибольшее распространение на практике получили БФМсигналы, для которых фазы элементарных импульсов n могут принимать только два значения: 0 или . Поэтому комплексная амплитуда импульса
ak U0e j k 1 , k 1, n . (4.57)
Последовательность
a a ,a , ,a , ,a |
n |
(4.58) |
||
k |
1 2 |
k |
|
|
будем называть бинарной кодирующей последовательностью, которая полностью определяется фазовой кодирующей последовательностьюk , где каждое k 0, . Кодирующая последовательность ak полностью характеризует сигнал, так как символы ak определяют нормированные комплексные амплитуды импульсов, образующих БФМ-сигнал. Таким образом, комплексная огибающая (4.56) принимает вид

4.9. Классы минимаксных БФМ-сигналов на основе совершенных двоичных решеток 147
|
|
|
|
|
|
|
|
|
U |
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
0 t T . |
|
||
|
|
|
|
|
|
|
|
|
(t) |
a rect t (k 1) , |
(4.59) |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Комплексно-сопряженная и сдвинутая во времени на |
огибаю- |
|||||||||||||||||||||||
щая (4.59) записывается выражением |
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
U(t ) |
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
a |
rect t (k 1) |
. |
(4.60) |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
|
|
|
|
|
|
0 |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Функция неопределенности БФМ-сигнала |
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
n 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R( , ) |
|
|
U(t)U(t )e |
j t |
dt |
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
n 0 |
n |
n |
|
|
|
rect t |
(k 1) rect t (m |
1) |
e j t dt |
(4.61) |
||||||||||||
|
|
|
|
|
|
|
a a |
|||||||||||||||||||||
n |
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
k m |
|
|
|
|
|
0 |
|
|
|
|
|
|
|
0 |
|
|
||||||||
|
|
|
|
0 |
|
|
k 1 m 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
1 |
|
n |
n |
|
|
|
n 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a a |
|
rect t |
(k 1) rect t (m |
1) |
e j t dt. |
|
|||||||||||||||
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
n 0 |
k |
m |
|
|
|
|
|
0 |
|
|
|
|
|
|
|
0 |
|
|
||||||
|
|
|
|
k 1 m 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
Обозначим переменную |
сдвига последовательности во времени как |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 , |
|
|
|
|
(4.62) |
|||||||
где |
|
|
/ |
|
|
|
— целая часть; |
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
/ 0 |
|
|
— дробная часть от деления |
на 0 . |
|
||||||||||||||||||
|
|
|
|
Поскольку величина сдвига |
T T |
|
, то значения параметра |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
1 n |
, а значения параметра |
0 |
|
|
|
. С целью упрощения выра- |
||||||||||||||||||
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
жения (4.61) сдвинем влево каждую функцию времени из правой ча- |
|||||||||||||||||||||||||||
сти (4.61) на временной интервал величиной (n 1) 0 и введем с уче- |
||||||
том соотношения (4.62) обозначение 1 |
(k m) 0 0 . Теперь |
|||||
выражение (4.61) преобразуется к виду |
|
|
||||
|
|
n n |
n 0 |
|
|
1 |
R( , ) |
1 |
k |
m |
|||
n 0 |
a a |
|
rect t rect t e j (t (k 1) 0 )dt . (4.63) |
|||
|
k 1 m 1 |
|
|
|
|
|
Заметим, что каждый импульс с номером k сигнала S(t) пересекается в общем случае с двумя импульсами сигнала S(t ) под номером k 1 и под номером k . При этих условиях интеграл

148 Глава 4 | Системы бинарных фазоманипулированных сигналов. БФМ-сигналы
в правой части (4.63) не равен нулю. Таким образом, из всех значений m внутренней суммы (4.63) остаются только два значения
m k 1 , |
(4.64) |
m k . |
(4.65) |
Следовательно, двойную сумму в (4.63) можно разбить на две одинарные суммы, в которых следует вычислить лишь произведения вида: ak ak 1 и ak ak . Соответствующим образом вычисляются и пределы одинарных сумм, и пределы интегрирования, поэтому
|
|
1 |
|
n |
|
|
R( , ) |
|
|
akak 1 e j (k 1) 0 e j t dt |
|
||
n 0 |
|
|
||||
|
k 2 |
0 |
(4.66) |
|||
|
|
|
|
n |
0 |
|
|
|
1 |
|
|
||
|
|
akak e j (k 1) 0 |
e j t dt. |
|
||
n 0 |
|
|||||
|
|
k 1 |
|
|
||
Проведя интегрирование в (4.66) с учетом преобразований, подобно выполненных в (4.51), получим выражение корреляционной функции комплексной огибающей в окончательном виде, весьма удобном для моделирования
|
|
|
|
|
|
n |
|
|
|
|
R( , f ) |
|
sinc( f ) akak 1 e j f 0[ / 0 2(k 1)] |
|
|
||||||
n 0 |
|
|
||||||||
|
|
|
|
k 2 |
|
|
|
(4.67) |
||
|
|
(1 / |
|
) |
n |
|
|
|
||
|
|
0 |
j f |
[(1 / |
) 2(k 1)] |
|
||||
|
|
|
|
|
sinc( f 0 ) akak e |
0 |
0 |
|
, |
|
|
|
n |
|
|
|
|||||
|
|
|
|
|
|
k 1 |
|
|
|
|
где переменная частота Доплера f / 2 .
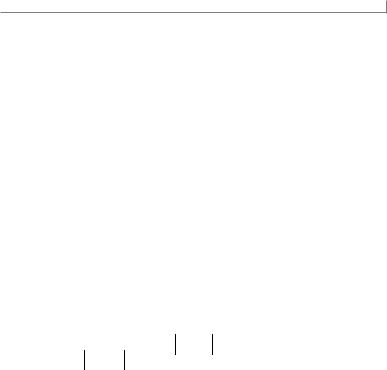
На рис. 4.9 в качестве примера построены: а — функция неопределенности R( , f ) БФМ-сигнала длины n 7 , кодированного последовательностью ak , и ее главные сечения, такие как б
— контуры сечения функции неопределенности на уровнях R 0,25 и R 0,5 ; в — временная автокорреляционная функция R( ,0) ; г — частотная автокорреляционная функция R(0, f ) . Из анализа выражения функции неопределенности (4.67) и рассмотрения графиков главных сечений на рис. 4.9 следует, что автокорреляционная функция
4.9. Классы минимаксных БФМ-сигналов на основе совершенных двоичных решеток 149
БФМ-сигнала непосредственно зависит от вида кодовой последова-
тельности ak .
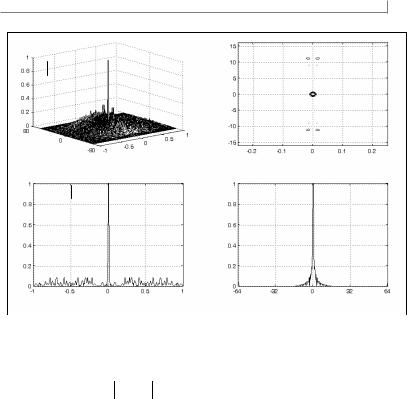
БФМ-сигналы на основе СДР. Рассмотрим функции неопределенности C -последовательностей на основе СДР [47]. Пусть длительность сигнала T n 0 1, где 0 T / n — длительность элементарного импульса. Ширину спектра сигнала определим соотношением
f 1 / 0 n / T , тогда база сигнала B f T n N 2 . На рис. 4.10 построены: а — функция неопределенности БФМ-сигнала длины
n 64 , кодированного C -последовательностью на основе следующей СДР
H , (4.68)
и ее главные сечения, такие как б — контуры сечения функции неопределенности на уровнях R 0,25 и R 0,5 ; в — временная автокорреляционная функция R( ,0) ; г — частотная автокорреляционная функция R(0, f ) .

150 Глава 4 | Системы бинарных фазоманипулированных сигналов. БФМ-сигналы
|
|
R(τ,2πf ) |
|
ɚ |
|
|
|
ɛ |
|
|||||||||||
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
R(τ,0) |
|
|
|
|
|
|
|
R(0,2πf ) |
|
ɝ |
|
||||||
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
ɜ |
|
|
|
|
|||||||||
Рис. 4.9. Функция неопределенности |
|
R( ,2 f ) |
|
|
|
БФМ-сигнала на основе |
||||||||||||||
|
|
|
||||||||||||||||||
|
|
М-последовательности |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
( M ) и ее главные сечения |
||||||||||||||||||
|
Отметим особенность корреляционной функции |
|
R( 0) |
|
рассма- |
|||||||||||||||
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, |
|
|
|
|||
триваемого бифазного сигнала (4.68), которая состоит в том, что в бли- |
||||||||||||||||||||
жайшей зоне около главного лепестка уровень боковых лепестков ААКФ значительно меньше минимаксного значения Rmin max 6 , т. е. в целом функция R( ,0) приближается по своему характеру к свойствам корреляционных функций локально — оптимальных фазоманипулированных сигналов. Заметим также, что на основе М-по- следовательностей длины n 26 1 63 путем добавления одного символа из алфавита ( 1 ) можно построить сигнал S длины n 64 . Однако все такие сигналы не являются минимаксными ни по критерию ПАКФ, ни по критерию ААКФ.
4.9. Классы минимаксных БФМ-сигналов на основе совершенных двоичных решеток 151
R(τ, f ) |
|
|
|
R(τ, f ) |
|
= [0.25,0.50] |
|
|
|
ɚ |
|
|
|
ɛ |
||
R(τ,0) |
|
|
|
R(0, f ) |
|
|
|
|
|
||||
|
ɜ |
ɝ |
||||
|
|
|
|
|
|
|
Рис. 4.10. Функция неопределенности |
|
R( ,2 f ) |
|
|
БФМ-сигнала |
|
|
|
|||||
|
на основе СДР (4.68) и ее главные сечения |
|||||
Модуль ФН R( , ) определяет разрешающие способности
иточности измерения времени задержки и частоты Доплера, при этом
основной интерес представляет центральная часть ФН — основной пик. Размеры основного пика по оси времени и оси частот Доплера
определяют разрешающие способности и точности измерений вре-
мени и частоты.
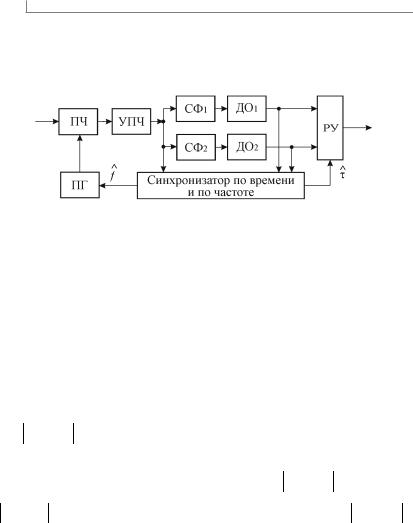
Прием сигналов с неизвестными параметрами и . Один из методов приема сигналов с неизвестными параметрами и заключается в том, что в состав обычного оптимального приемника вводят измеритель времени задержки и измеритель частоты, которые измеряют соответствующие параметры и вводят их в оптимальный приемник, как это показано на рис. 4.11, для случая двоичной системы связи и некогерентного метода приема. Здесь оптимальный приемник различения сигналов при известном времени прихода сигнала и известной несущей частоте состоит из двух каналов, каждый из которых представляет собой последовательное соединение согласованного фильтра (СФ)
идетектора огибающей (ДО). Решающее устройство (РУ) производит
152 Глава 4 | Системы бинарных фазоманипулированных сигналов. БФМ-сигналы
отбор максимального значения напряжений на выходе детекторов огибающих. При неизвестных параметрах сигнала синхронизатор осуществляет поиск ШПС, а затем и синхронизацию по времени и по частоте.
Рис. 4.11. Квазиоптимальный приемник некогерентного типа
Оценка по частоте fˆ вводится в подстраиваемый генератор (ПГ), напряжение с которого поступает на преобразователь частоты (ПЧ). Напряжение на промежуточной частоте, учитывающее оценку по частоте fˆ , усиливается в усилителе промежуточной частоты (УПЧ) и поступает на входы согласованных фильтров. Оценка по задержке ˆ вводится в решающее устройство и фиксирует моменты принятия решения. С ростом базы ШПС точности измерений растут, при этом система поиска (синхронизатор) определяет параметры ШПС с точностью до размеров центрального пика ФН этого сигнала.
Взаимная функция неопределенности. На рис. 4.12 в качестве другого примера построены: а — взаимная функция неопределенности R1,2 ( , f ) минимаксных по свойствам АВКФ бифазных сигналов C1 и C2 длины n 64 , кодированных соответственно следующими видами СДР (4.69) и ее главные сечения, такие как б — контуры сечения взаимной функции неопределенности R1,2 ( , f ) на уровнях R 0,15 и R 0,20 ; в — временная взаимокорреляционная функция R1,2 ( ,0) ; г — частотная взаимокорреляционная функция R1,2 (0, f ) .
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
, H |
|
|
(4.69) |
|||
H |
|
|
|
|
, |
|||
1 |
|
|
2 |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|

4.11. Рекуррентный алгоритм скользящего корреляционного декодирования 153
В заключение отметим, что предложенные классы минимаксных бифазных сигналов на основе совершенных двоичных решеток имеют в целом хорошие корреляционные свойства и, несмотря на отно-
сительно большой уровень разбаланса ( K K N ), могут найти применение при решении разнообразных задач радиолокации, радионавигации, радиоуправления, синхронизации, а также для построения асинхронных адресных систем связи.
R1,2 (τ, f ) |
|
R1,2 (τ, f ) |
= [0.15,0.20] |
ɚ |
|
|
|
ɛ |
||
R1,2 (τ,0) |
|
|
|
R1,2 (0, f ) |
|
|
|
|
|
||||
ɜ |
ɝ |
Рис. 4.12. Взаимная функция неопределенности БФМ-сигналов на основе решеток (4.65) и ее главные сечения
4.11.Рекуррентный алгоритм скользящего корреляционного декодирования циклических кодов
В данном подразделе на основе учета сильной алгебраической структуры циклических кодов предложен эффективный алгоритм рекуррентного скользящего корреляционного декодирования и найдены минимальные значения удельных коэффициентов аппаратурной

154 Глава 4 | Системы бинарных фазоманипулированных сигналов. БФМ-сигналы
сложности арифметического устройства декодера. Приведен пример построения экономичной схемы декодера корреляционного типа кодов БЧХ.
Коды максимальной длины (М-коды) нашли широкое применение в радиолокации и связи. Эти коды полностью задаются видом первообразного неприводимого над полем GF (2) полинома f (x) степени k , имеют максимальную длину n 2k 1 и представляет собой, по сути, матрицу — циркулянт C = 
 ci, j
ci, j 
 , i, j =0, n -1, каждая строка которой является разрешенным кодовым словом.
, i, j =0, n -1, каждая строка которой является разрешенным кодовым словом.
Корреляционное декодирование М-кодов формально сводится к умножению матрицы C на принятый вектор сигнала
Y ={y j}, j =0, n -1 , компонентами которого являются некоторые действительные числа. Таким образом, вектор корреляции
Z CY zi , i 0, n 1 . Если максимум max zi zl , то принятый сигнал рассматривается как l — й вектор матрицы C .
Основная трудность при осуществлении корреляционного декодирования состоит в вычислении вектора корреляции Z . В работах [67,75,76] найдены оценки коэффициента вычислительной сложности алгоритмов вычисления вектора Z для различных классов кодов, основываясь при этом на алгоритме быстрого преобразования Уолша-Адамара и различных его модификациях. Значительно меньше исследованы в литературе возможности рекуррентного скользящего корреляционного декодирования (свертки) циклических кодов, когда имеется возможность многократного использования результатов предыдущих вычислений частичных сумм для формирования вектора корреляции Z .
Обозначим через QA количество сумматоров, а через QM —объем ячеек памяти b — разрядных отсчетов или частичных промежуточных сумм, требуемых для реализации арифметического устройства декодера скользящего корреляционного декодирования (СКД — декодера) с максимальным уровнем параллелизма вычисления всех координат вектора Z , подобно многоканальному трансверсальному фильтру, пусть J — мощность кода. Порядок роста аппаратурной сложности арифметического устройства (АУ) СКД-декодера будем оценивать
двумя удельными коэффициентами сложности: |
|
|||||||
A |
|
QA |
, |
M |
|
QM |
. |
(4.70) |
|
|
|||||||
|
|
J |
|
|
J |
|
||