

ТАУ 2-12 Лекции / ЛЕКЦИЯ_10 / testy_18083_po_teorii_lineinyh_sistem_avtomaticheskogo_regul
.pdfТесты по дисциплине «Теория линейных систем автоматического регулирования»
для студентов специальности 5В070200 «Автоматизация и управление»
1 Наука об управлении
A)кибернетика
B)теория автоматического управления
C)теория автоматического регулирования
D)теория распознавания образов
E)теория игр
F)теория групп
G)теоретические основы электротехники
H)теория машин и механизмов
2 Система, выполняющая технологический процесс без участия человека
A)система автоматического регулирования
B)САР
C)АСР
D)САК
E)АСУ
F)АСУП
G)АСУТП
H)САПР
3 Система, выполняющая технологический процесс с непосредственным участием человека
A)АСУ
B)АСУП
C)автоматизированная система управления
D)САР
E)САУ
F)САК
G)АСР
H)система автоматического регулирования
4 Система, выполняющая технологический процесс с непосредственным участием человека
A)САПР
B)система автоматизированного проектирования
C)CAD
D)САУ
E)САР
F)САК
G)АСР
H)система автоматического управления
5 Основное входное воздействие следящих систем
A)задающее воздействие
B)задание
C)r(t)
D)управление
E)возмущение
F)ошибка
G)отклонение
H)управляемая величина
6 Воздействие, противодействующее цели регулирования
A)возмущающее воздействие
B)возмущение
C)f(t)
D)задание
E)управление
F)ошибка
G)отклонение
H)управляемая величина
7 Величина на входе регулятора
A)ошибка регулирования
B)отклонение
C)e(t)
D)задание
E)управление
F)возмущение
G)цель
H)управляемая величина
8Разность r(t)-y(t)
A)ошибка регулирования
B)отклонение
C)e(t)
D)задание
E)управление
F)возмущение
G)цель
H)управляемая величина
9Основное входное воздействие следящих систем
A)цель
B)задание
C)программа
D)управление
E)регулируемая величина
F)ошибка
G)отклонение
H)управляемая величина
10Воздействие, противодействующее цели регулирования
A)помеха
B)возмущение
C)нагрузка
D)задание
E)управление
F)ошибка
G)отклонение
H)управляемая величина
11Координата, показатели которой обеспечиваются системой регулирования
A)выходная величина
B)управляемая величина
C)регулируемая величина
D)помеха
E)возмущение
F)возмущающее воздействие
G)нагрузка
H) погрешность датчика
12 Величина на выходе регулятора
A)u(t)
B)управление
C)управляющее воздействие
D)ошибка
E)отклонение
F)возмущение
G)задание
H)помеха
13 Выходная величина системы
A)отклик
B)реакция
C)регулируемый параметр
D)задание
E)возмущение
F)цель
G)программа
H)помеха
14 Задачи теории автоматического управления
A)коррекция свойств систем управления
B)оценка качества систем управления
C)оценка устойчивости систем управления
D)мониторинг окружающей среды
E)расчет рентабельности производства
F)удовлетворение эргономических требований к оборудованию
G)подбор компетентных кадров
H)монтаж технологических линий
15 Элементами структурных схем являются
A)ветви
B)сумматоры
C)узлы
D)сумки
E)лестницы
F)деревья
G)корни
H)нити
16 Свойства сумматора
A)все входы независимы
B)коэффициент усиления по всем входам 1
C)не вносит задержки или опережения по времени
D)вносит опережение сигнала по времени
E)вносит отставание сигнала по времени
F)входы взаимозависимы
G)имеет более одного выхода
H)коэффициент усиления является переменной величиной
17 Правила структурных преобразований применяют для
A)последовательных звеньев
B)параллельных звеньев
C)соединения звеньев с обратной связью
D)статических звеньев
E)астатических звеньев

F)ненаправленных звеньев
G)динамических звеньев
H)звеньев с многими входами и выходами
18 Эквивалентная функция последовательно соединенных звеньев w1, w2, w3
A)w1*w2*w3
B)w1*w3*w2
C)w3*w2*w1
D)w1+w2+w3
E)w1+w3+w2
F)w3+w2+w1
G)w1*w2+w3
H)w1+w2*w3
19 Эквивалентная функция параллельно соединенных звеньев w1, w2, w3
A)w1+w2+w3
B)w1+w3+w2
C)w3+w2+w1
D)w1*w2+w3
E)w1+w2*w3
F)w1*w2*w3
G)w1*w3*w2
H)w3*w2*w1
20 Передаточная функция системы 
A)W1W2
1W1W2W3
B)W2W1
1W1W2W3
C)W1W2
1W3W2W1
D)W1W2
1W1W2W3
E)W1W2
1W3W2W1
F)W2W1
1W1W2W3
G)W2W1
1W3W2W1
H)W1W2
1W3W1W2
21 Передаточная функция разомкнутой системы 
A) W1W2W3
B)W2W1W3
C)W1W3W2
D)W1W2W3
E)W2W1W3
F)W1W3W2
G)W1W2 /(1 W1W2W3)
H)W1W2 /(1 W1W2W3)
22 Передаточные функции замкнутой системы 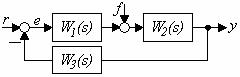
A)Wyr (s)
B)Wyf (s)
C)Wer (s)
D)Wry(s)
E)Wfy(s)
F)Wre(s)
G)Wfe(s)
H)Wfr(s)
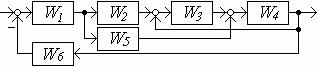
23 Определители всех замкнутых контуров обратной связи
A)1 W3W4
B)1 W1W2W3W4W6
C)1 W1W5W4W6
D)1 W3W4
E)1 W1W2W3W4W6
F)1 W1W2W3W4W6
G)1 W1W2W5W4W6
H)1 W1W5W3W4W6
24 Обратная связь бывает
A)гибкая
B)жесткая
C)главная
D)мягкая
E)негибкая
F)твердая
G)заглавная
H)длинная
25 Обратная связь называется гибкой, если
A) создает задержку или опережение сигнала во времени

B)проявляется только в переходном режиме
C)имеет хотя бы одну переменную Лапласа s в передаточной функции
D)не создает задержку сигнала во времени
E)действует в установившемся режиме
F)не содержит переменную Лапласа s в передаточной функции
G)не создает опережение сигнала во времени
H)не действует в переходном режиме
26 Обратная связь называется жесткой, если
A)не создает задержку или опережение сигнала во времени
B)проявляется как в динамике, так и в статике
C)не содержит переменную Лапласа s в передаточной функции
D)создает задержку сигнала во времени
E)создает опережение сигнала во времени
F)не действует в переходном режиме
G)не действует в установившемся режиме
H)имеет хотя бы одну переменную Лапласа s в передаточной функции 27 Обыкновенным дифференциальным уравнением с постоянными
коэффициентами описывается во времени поведения систем
A)линейных
B)непрерывных
C)стационарных
D)нелинейных
E)импульсных
F)с распределенными параметрами
G)нестационарных
H)дискретных
28 Свойства преобразования Лапласа
A)x(t) + y(t) ÷ X(s) + Y(s)
B)kx(t) ÷ kX(s)
1 s
C)x(
D)a·P(ω) ÷ a·h(t
E)P(∞)=h(0)
F)P(0)=h(∞)
G)P(a·ω) ÷ h(t/a)
H)dP(ω)/dω < 0t) X
29 Операторная передаточная функция
A)отношение изображений по Лапласу выходной величины ко входной при нулевых начальных условиях
B)изображение по Лапласу весовой функции
C)совокупность нулей, полюсов и коэффициента передачи системы
D)отношение изображений по Лапласу выходной величины ко входной
E)отношение изображений по Лапласу входной величины к выходной
F)изображение по Лапласу переходной функции
G)реакция системы на единичный скачок
H)реакция системы на единичный импульс
30 Опасность сокращения одинаковых выражений в числителе и знаменателе операторной передаточной функции состоит в том, что
A)неверно определяется порядок системы
B)может неверно оцениваться устойчивость системы

C)неверно определяется реакция на ненулевые начальные условия
D)увеличивается время расчета
E)неверно рассчитывается переходная характеристика
F)неверно рассчитывается импульсная характеристика
G)неверно рассчитывается частотная характеристика
H)увеличивается число членов разложения на простые дроби
31 Нулями называются
A)корни полинома числителя передаточной функции
B)корни, обозначаемые на комплексной плоскости кружком
C)значения переменной, обращающие передаточную функцию в ноль
D)корни полинома знаменателя передаточной функции
E)корни, обозначаемые на комплексной плоскости крестиком
F)значения переменной, обращающие передаточную функцию в бесконечность
G)корни характеристического уравнения системы
H)коэффициенты полинома числителя передаточной функции
32 Полюсами называются
A)корни полинома знаменателя передаточной функции
B)корни, обозначаемые на комплексной плоскости крестиком
C)корни характеристического уравнения системы
D)коэффициенты полинома числителя передаточной функции
E)коэффициенты полинома знаменателя передаточной функции
F)корни полинома числителя передаточной функции
G)корни, обозначаемые на комплексной плоскости кружком
H)значения переменной, обращающие передаточную функцию в ноль 33 По характеристическому полиному выполняется
A)оценка устойчивости системы
B)оценка качества регулирования корневым методом
C)расчет реакции на ненулевые начальные условия
D)оценка качества регулирования частотным методом
E)оценка качества регулирования интегральным методом
F)выбор корректирующих устройств по возмущению
G)определение знака обратной связи в структурной схеме
H)оценка точности системы
34 Корни передаточной функции системы 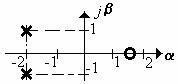
A)-2+j
B)-2-j
C)1,5
D)2
E)1
F)-2
G)-1+2j
H)-1-2j
35 Коэффициент усиления в установившемся режиме kуст
A)bm /an
B)limW(s) s
s 0 s
C)W(s)s 0
D)b0 /a0
E)W(s)s
F)W(s)s j
G)W(j )
H)limW(s) s
s s
36 Схема с бесконечным статическим коэффициентом усиления
A) 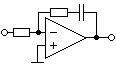
B) 
C) 
D) 
E) 
F) 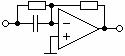
G) 
H) 
37 Типовое воздействие 1(t) это
A)ступенчатая функция
B)единичный скачок
C)функция Хевисайда
D)импульсная функция
E)дельта-функция
F)функция Дирака
G)гармоническая функция
H)весовая функция
38 Типовое воздействие δ(t) это
A)импульсная функция
B)единичный импульс
C)функция Дирака
D)единичный скачок
E)ступенчатая функция
F)функция Хевисайда
G)гармоническая функция
H)полиномиальная функция
39 Типовые воздействия, образованные скачком
A)1(t)
B)t 1(t)
C)t2 1(t)
D)t
E)t2
F)sin( t)
G)cos( t)
H)(t)
40 Типовое гармоническое воздействие характеризуется параметрами
A)частота
B)амплитуда
C)фаза
D)запаздывание
E)постоянная времени
F)установившееся значение
G)статическая ошибка
H)начальное значение
41 Реакция на единичный скачок при нулевых начальных условиях
A)переходная функция
B)переходная характеристика
C)h(t)
D)кривая разгона
E)импульсная функция
F)весовая функция
G)функция Хевисайда
H)функция Дирака
42 Реакция на единичный импульс при нулевых начальных условиях
A)импульсная функция
B)весовая функция
C)g(t) или w(t)
D)кривая разгона
E)переходная функция
F)переходная характеристика
G)h(t)
H)производная переходной функции
43 Импульсная функция иначе представляет собой
A)оригинал передаточной функции
B)обратное преобразование Лапласа от W(s)
C)производную от переходной функции
D)обратное преобразование Лапласа от W(s)/s
E)изображение передаточной функции
F)изображение переходной функции
G)изображение функции Хевисайда
H)изображение функции Дирака

44Система с h( )
A)W(s) k
s
B) W(s) k s(s 1)
s k C) W(s) s2 s
ks2 2s 3 D) W(s) s2 3s 2
ks2 2s E) W(s) s2 3s 2
ks2 F) W(s) s2 3s 2
k
G) W(s) s2 3s 1
ks 3 H) W(s) s2 3s 2
45 Система с h(0) k
ks2 2s 3 A) W(s) s2 3s 2
B) W(s)
ks2 2s
s2 3s 2
C) W(s)
ks2
s2 3s 2
D) W(s)
ks 3
s2 3s 2
s2 2s k E) W(s) s2 3s 1
F) W(s)
k
s2 3s 1
s2k
G)W(s) s2 3s 2
H) W(s)
ks2 2s 3
2s2 3s 1
46 Если изображение равно 1/(s 1)3 , то его разложение будет содержать простые
дроби
A)k (s 1)3
(s 1)3
B)k (s 1)2
(s 1)2