

Задача: Дано: МСЧ = 3,4 мили, М01 = 6,4 мили, М02 = 2,7 мили, МВ – ?
Решение: РСЧ = 0,087, Р01 = 0,024, Р02 = 0,137, ΣРС = 0,248
Задачи на расчет вероятнейшего места судна (для МНК № 3207 или № 32106)
Рассчитать значения координат вероятнейшего места судна (φВ, λВ) и его радиальную СКП ( МВ), если это вероятнейшее место получено осреднением двух обсерваций и счислимого места судна (данные для расчета → см. условия задач 1÷10).
№ зад. |
|
|
|
Условие |
|
|
|
|
Ответ |
|
φс |
λс |
Мсч, |
С1 =… ° -… |
МО1, |
С2 =… ° -… |
МО2, |
φв |
λв |
Мв, |
|
|
мили |
мили |
мили |
мили |
мили |
мили |
||||
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
1 |
44°03,0′N |
37°10,0′Е |
1,0 |
45° - 2,0мили |
0,7 |
135°-3,0мили |
0,7 |
44°02,6′N |
37°12,0′Е |
0,4 |
2 |
44°04,0′N |
37°45,0′Е |
2,0 |
290°-3,0мили |
1,0 |
230°-2,0мили |
1,0 |
44°04,0′N |
37°42,3′Е |
0,7 |
3 |
43°55,0′N |
37°18,0′Е |
1,0 |
90° - 3,0мили |
1,0 |
50° - 2,0мили |
1,0 |
43°55,4′N |
37°20,2′Е |
0,6 |
4 |
44°10,0′N |
37°23,0′Е |
2,0 |
300°-3,0мили |
0,7 |
240°-2,6мили |
1,0 |
44°10,4′N |
37°19,7′Е |
0,6 |
5 |
44°08,0′N |
37°25,0′Е |
1,0 |
20° - 2,0мили |
0,7 |
90° - 2,0мили |
0,7 |
44°28,9′N |
37°26,4′Е |
0,4 |
6 |
44°17,0′N |
37°23,0′Е |
0,7 |
40° - 2,0мили |
1,0 |
100°-2,0мили |
1,0 |
44°17,2′N |
37°24,2′Е |
0,5 |
7 |
44°25,0′N |
37°40,0′Е |
1,0 |
30° - 2,0мили |
0,7 |
90° - 2,0мили |
0,7 |
44°25,8′N |
37°41,8′Е |
0,4 |
8 |
44°17,0′N |
37°42,0′Е |
0,7 |
60° - 2,0мили |
0,5 |
110°-2,0мили |
0,5 |
44°17,1′N |
37°44,4′Е |
0,3 |
9 |
44°13,0′N |
37°34,0′Е |
1,0 |
280°-3,0мили |
0,5 |
250°-2,0мили |
0,7 |
44°13,0′N |
37°30,9′Е |
0,4 |
10 |
44°11,0′N |
37°08,0′Е |
2,0 |
80° - 2,4мили |
1,0 |
0° - 2,2мили |
1,0 |
44°12,0′N |
37°09,4′Е |
0,7 |
24.2. Исключение фигуры погрешностей
24.2.1. Общие положения
Точка пересечения двух линий положения соответствует действительному месту судна лишь с какой-то вероятностью Р%.
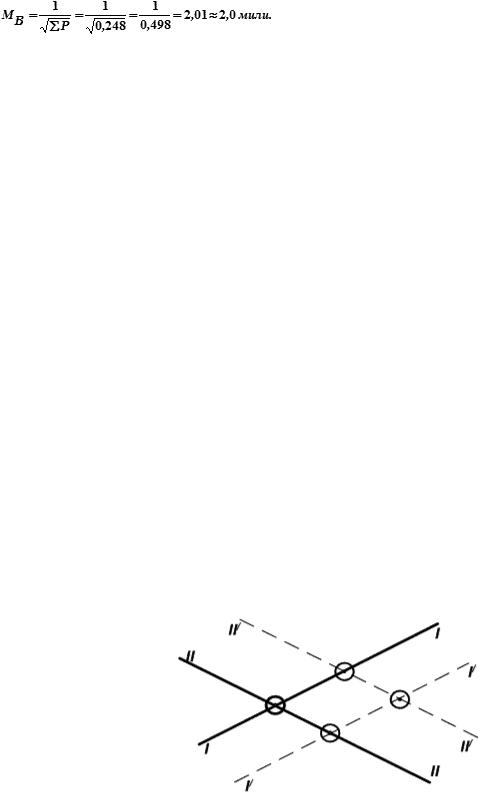
Если в процессе определения места судна были допущены промахи (или в измерениях, или в расчетах), то обнаружить эти промахи просто невозможно, так как 2 ЛП всегда пересекутся в одной точке (рис. 24.8).
Поэтому, для получения более точного и надежного обсервованного места судна, необходимо иметь не 2, а 3 или 4 ЛП, которые или пересекутся в одной точке (рис. 24.9) или, под влиянием неучтенных погрешностей, образуют фигуру погрешностей абс (рис. 24.10).
Рис. 24.8. Пересечение двух линий положения
Появление фигуры погрешностей и ее размеры уже позволяют обнаружить – есть промахи или их нет – и принять меры для их исключения или уменьшения (проверить расчеты, повторить наблюдения).
Три или четыре ЛП обеспечивают более высокую точность и надежность обсервованного места и, по возможности, следует стремиться определять место минимум по 3-м ЛП, т.е. получить полноценную обсервацию.
Для качественного решения этой задачи очень важным является оптимальный подбор ориентиров для определения места и отыскание вероятнейшего места, т.е. такой точки в фигуре погрешности, которая ближе всего располагается к действительному (фактическому) месту судна.
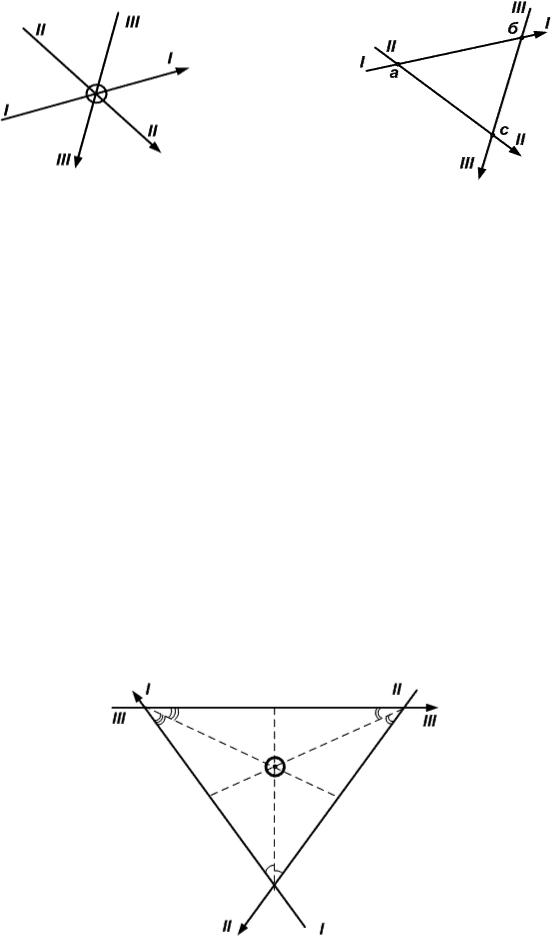
Рис. 24.9. Пересечение трех линий положения не |
Рис. 24.10. Пересечение трех линий положения |
отягощенных погрешностями |
отягощенных погрешностями |
Ориентиры, для определения места судна, подбирают, по возможности, по всему горизонту, т.е. через ~ 120° (если 3 ЛП) и через ~ 90° (если 4 ЛП), т.е. линии положения при прокладке их на путевой карте должны пересекаться под углами ~ 120° (3 ЛП) или ~ 90° (4 ЛП).
Если при построении на путевой карте, линии положения образуют фигуру погрешности, со стороной < 0,5 мили (при плавании в прибрежных водах) или 1,0÷1,5 мили (при плавании в открытом море), то вероятнейшее место судна находят «глазомерно» в центре фигуры погрешности.
Если же размеры фигуры погрешности превышают указанные выше значения, необходимо определять вероятнейшее место судна.
24.2.2. Исключение фигуры погрешностей методом биссектрис
Метод биссектрис применяется при обсервациях по однородным линиям положения (например: 3 визуальных пеленга).
Если ориентиры находятся по одну сторону горизонта (разность между крайними пеленгами менее 180°), то вероятнейшее обсервованное место может находиться вне фигуры погрешностей и, в этом случае, следует повторить наблюдения.
Если ориентиры расположены по всему горизонту, то вероятнейшее место находится внутри фигуры погрешностей в точке пересечения биссектрис внутренних углов (рис. 24.11).
При определении места судна по высотам 3-х светил для отыскания вероятнейшего места при получении фигуры (треугольника) погрешностей используют правило освещенности сторон
«…вероятнейшее место находится в точке пересечения биссектрис углов вершин треугольника, стороны которого имеют одинаковую освещенность…».
Рис. 24.11. Нахождение вероятнейшего места судна при расположении ориентиров по всему горизонту
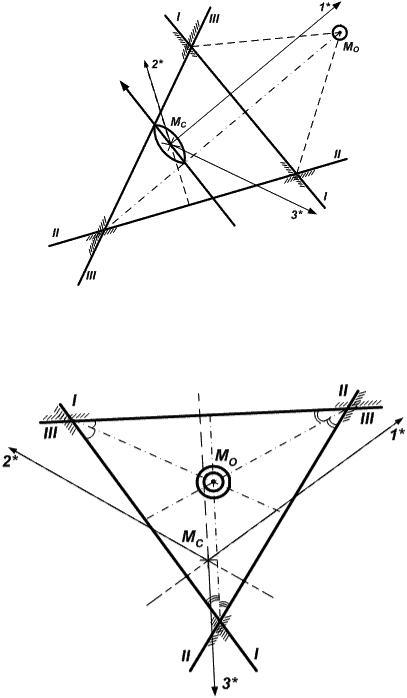
На рис. 24.12 место судна определено по 3-м звездам и все они находятся по одну сторону горизонта (с правого борта). Внутренние углы треугольника (их стороны) имеют разную освещенность, поэтому, по правилу освещенности вероятное место судна внутри фигуры находиться не может (если не исключаются систематические погрешности, т.к. при наличии только случайных погрешностей вероятное место будет внутри фигуры на пересечении противомедиан).
Рис. 24.12. Нахождение вероятнейшего места при расположении ориентиров по одну сторону горизонта
На рис. 24.13 место судна определено по 3-м звездам, расположенным по всему горизонту.
Рис. 24.13. Нахождение вероятнейшего места при расположении ориентиров по всему горизонту
Стороны внутренних углов фигуры (треугольника) погрешностей имеют одинаковую освещенность, и вероятнейшее место в этом случае находится внутри фигуры на пересечении биссектрис внутренних углов. Причем это будет справедливо и при наличии только случайных погрешностей (точка пересечения противомедиан).
Для оценки точности полученного места можно использовать приближенную формулу
МО3ЛП ≈ МО2ЛП |
(24.3) |
где МО2ЛП – радиальная (круговая) СКП, рассчитанная для 2-х линий положения, угол пересечения
которых ближе всего к 90°.
Радиальную (круговую) СКП обсервованного по 4-м линиям положения можно определить по приближенной формуле:
МО4ЛП ≈ mЛП |
(24.4) |
где mЛП – СКП линии положения.
24.2.3. Отыскание вероятнейшего места в фигуре погрешностей центрографическим методом
Центрографический метод применяется в том случае, когда обсервованное место определяют по разнородным линиям положения (визуальный пеленг и радиопеленг, радиопеленг и высота светила и т.д.), т.е. когда погрешности линий положения различны.
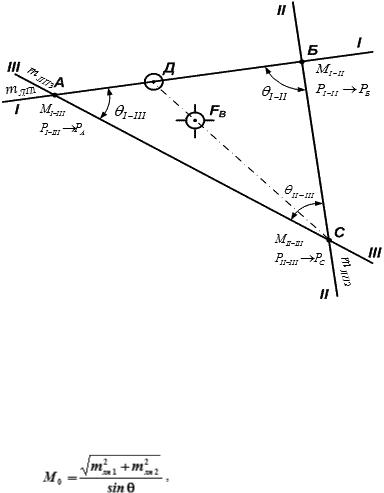
В этом случае каждая вершина фигуры погрешности рассматривается как отдельно взятое место. Схема решения задачи показана на рис. 24.14.
Рис. 24.14. Нахождение вероятнейшего места в фигуре погрешностей центрографическим методом
1.Измеряются углы пересечения линий положения у каждой вершины фигуры погрешности (θ) и рассчитываются СКП каждой линии положения (mЛП).
2.По формуле:
(24.5)
3.рассчитывают радиальную (круговую) СКП каждой вершины фигуры погрешности (точка А →
МI-III, точка Б→ МI-II, точка С → МII-III).
4.По формуле (24.1) ( ) рассчитываются веса вершин углов фигуры погрешности (РI-III → точка А, РI-II → точка Б, РII-III → точка С).
) рассчитываются веса вершин углов фигуры погрешности (РI-III → точка А, РI-II → точка Б, РII-III → точка С).
5.На одной из сторон фигуры погрешности (например: стороне АБ) центрографическим приемом
определяется средневесовое место (ДАБ). Вес полученного места будет равен сумме весов вершин
А и Б (РД = РА + РБ).
6.Применив центрографический прием к средневесовому месту точки Д и вершине С,
определяется новое средневесовое место точка FВ, которое и будет вероятнейшим обсервованным местом в фигуре погрешности. Вес этого места будет равен сумме весов всех вершин фигуры погрешности (РF = РА + РБ + РС = РД + РС).
7.По формуле (24.2) ( ) рассчитывается значение радиальной (круговой) СКП вероятнейшего места судна.
) рассчитывается значение радиальной (круговой) СКП вероятнейшего места судна.