

18.3. Коэффициент точности счисления и его расчет
Выявление погрешностей счисления производится посредством обсерваций (определением мест по внешним ориентирам). И хотя каждая обсервация содержит собственные погрешности, их совокупность позволяет выявить закон вероятных погрешностей счисления по времени.
Если в процессе плавания в данном районе (по данному маршруту) регулярно определялось место судна, и были получены величины невязок (разность в милях между счислимым и обсервованным местами на один и тот же момент времени) (рис. 18.4).
Рис. 18.4. Невязка счисления
т. А – счислимое место на время Т, т. В – обсервованное место на это же время,
С – расстояние в милях между т. А и т. В (величина невязки).
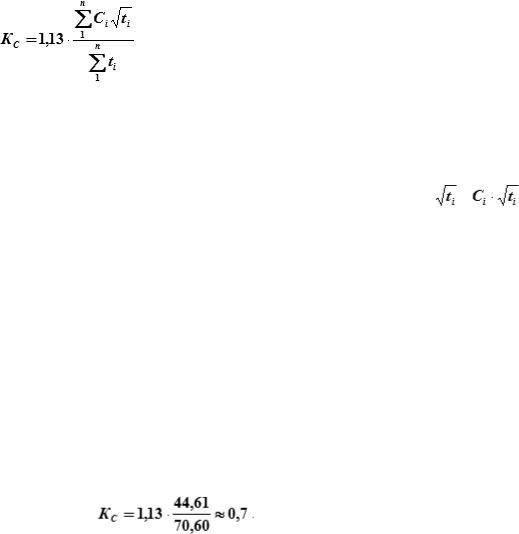
И если по значениям этих невязок (не < 13 невязок) построить график погрешностей счисления в зависимости от времени (рис. 18.5), то осреднение всех полученных на графике точек позволит получить «картину» изменения СКП счисления (МС) по времени плавания по счислению (t).
Вид экспериментально полученной кривой зависимости величины МС(t) от времени плавания по счислению t (рис. 18.5) показывает, что в пределах 2-х часового интервала скорость изменения погрешности счислимого места подчиняется линейному закону, то есть погрешность счисления нарастает равномерно, после чего кривая приближается к параболе, а зависимость становится квадратической.
Рис. 18.5. График погрешности в счислении пути судна
Таким образом, погрешность счисления можно рассчитать на любой момент времени (Т1), опираясь на две основные величины:
1. |
продолжительность плавания по счислению (t), то есть время плавания судна от исходной |
|
|
(начальной) точки (Т0) до настоящего счислимого места (Т1) – |
t = Т1 − Т0; |
2. |
коэффициент точности счисления (КС), который характеризует скорость нарастания |
|
|
погрешности счисления по времени плавания по счислению. |
|
Математически величина СКП счисления (МС(t)) описывается следующими формулами: |
||
|
МСt≤2ч = 0,7 · КС · tчас, (мили) – при t ≤ 2 часа |
(18.9) |
|
|
(18.10) |
Величина КС – коэффициент точности счисления. |
|
|
Рассчитывается по специальной методике для каждого района (моря) плавания судна анализом полученных (не < 13) обсерваций.
Общая формула расчета при t > 2ч:
(18.11)
Расчет значения КС рассмотрим на примере:
Судно, выполняя плавание в Черном море, с момента выхода из порта до возвращения в него имело 13 определений места. Результаты определений сведены в таблицу 18.4.
Таблица 18.4.
№№ |
Величина каждой невязки |
Время плавания по счислению между |
|
|
п/п |
счисления Сi (мили) |
обсервациями (часы) |
|
|
|
|
|
|
|
1 |
1,7 |
6,2 |
2,50 |
4,23 |
2 |
1,4 |
8,0 |
2,84 |
3,96 |
3 |
1,4 |
4,4 |
2,10 |
2,94 |
4 |
0,3 |
3,1 |
1,76 |
0,53 |
5 |
2,0 |
3,0 |
1,73 |
3,47 |
6 |
0,8 |
8,2 |
2,87 |
2,29 |
7 |
0,8 |
3,5 |
1,88 |
1,60 |
8 |
2,5 |
2,5 |
1,58 |
3,96 |
9 |
2,1 |
6,1 |
2,47 |
5,19 |
10 |
0,9 |
6,4 |
2,54 |
2,28 |
11 |
2,0 |
4,0 |
2,00 |
4,00 |
12 |
1,5 |
7,1 |
2,66 |
4,00 |
13 |
2,2 |
8,1 |
2,85 |
6,26 |
|
|
|
|
|
|
|
Σ ti = 70,6 |
|
44,61 |
По |
формуле (18.11) рассчитываем: |
|
|
|
КС по невязкам в счислении рассчитывается для отдельных маршрутов плавания или для района плавания с учетом гидрометеоусловий для каждого проекта (типа) судна и его штурманского вооружения.
Полученные величины КС каждым судном осредняются для данного района и данного проекта. Эти средние значения КС являются исходными для нового судна этого типа.
Примечание:
Метод расчета КС по погрешностям в элементах счисления более сложен и в практике применяется редко.
Из опыта плавания:
|
|
Таблица 18.5. |
|||
|
Для транспортных судов |
|
КС |
|
|
|
|
|
|
||
1. Автоматическое счисление (АПИ РНС, НАК) с: |
|
|
|
||
• |
абсолютным лагом |
0,4 |
|||
• |
относительным лагом |
0,6 |
|||
|
|
|
|
||
2. Ручное графическое счисление: |
|
|
|
||
• закрытые моря со слабыми течениями |
0,9 |
÷ |
1,2 |
||
1,5 |
÷ |
1,8 |
|||
• моря с сильными переменными течениями |
|||||
2,0 |
÷ |
2,4 |
|||
• моря с сильными постоянными течениями |
|||||
1,8 |
÷ |
2,4 |
|||
• океаны при нормальной погоде |
|||||
3 |
÷ |
4 |
|||
• океаны при штормовой погоде |
|||||
|
|
|
|||
18.4. Средняя квадратическая погрешность линии положения
Для большинства навигационных параметров навигационные изолинии являются кривыми линиями, построение которых на карте вызывает определенную трудность.
В этих случаях навигационная изолиния может быть заменена небольшим по длине отрезком прямой линии, касательным к изолинии вблизи счислимого места судна (рис. 18.6).
Рис. 18.6. Навигационная изолиния и линия положения
Эти прямые линии, которые заменяют навигационные изолинии, называются линиями положения → отрезки прямых линий, касательные к навигационным изолиниям вблизи счислимого места судна.
Замена навигационных изолиний линиями положения позволяет простыми приемами находить обсервованное место судна на карте и производить оценку его точности.
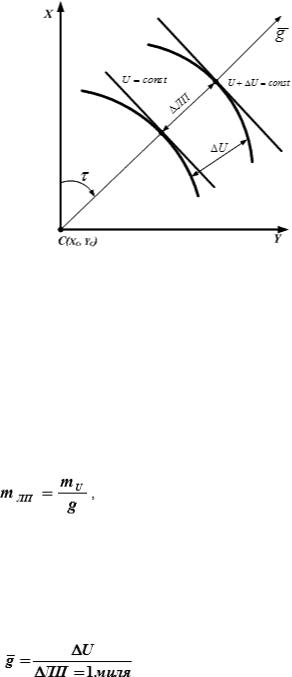
Линия положения (ЛП) характеризуется следующими свойствами (рис. 18.7):
Рис. 18.7. Свойства навигационной линии положения
1.При малом изменении величины навигационного параметра ( U) линии положения смещаются параллельно друг другу (ЛП′1  ЛП1).
ЛП1).
2.Величина параллельного смещения линии положения ( ЛП) находится в пропорциональной зависимости от величины изменения навигационного параметра (ΔU).
Математически это свойство выражается формулой
(18.12)
где ЛП – линейное смещение линии положения в единицах длины (мили); U – изменение навигационного параметра в его единицах;
g – градиент навигационного параметра (его численное значение).
Неизбежные случайные погрешности, допускаемые при измерениях навигационных параметров (пеленгов, расстояний и пр.) вызывают погрешность и линии положения.
Рассмотрим, каковы будут эти погрешности в зависимости от значений градиентов (g) и погрешностей измерения навигационного параметра (mU).
Допустим, что в результате измерения какого-то навигационного параметра была получена
навигационная изолиния, которая в общем случае выражается как: |
|
U = f (x, y) |
(18.13) |
Заменим вблизи счислимого места навигационную изолинию отрезком прямой ей касательным –
линией положения (рис. 18.8). |
U. В |
Пусть при измерении навигационного параметра была допущена случайная погрешность |
|
результате этой погрешности линия положения сместится по нормали на некоторое расстояние |
ЛП. |
Рис. 18.8. Свойства навигационной линии положения
Величина смещения линии положения в зависимости от погрешности навигационного параметра
(ΔU) и его градиента ( ) найдется по формуле (18.12), то есть
) найдется по формуле (18.12), то есть  (2-е свойство линии положения).
(2-е свойство линии положения).
Градиент навигационного параметра (g) для данной точки – величина постоянная.
Учитывая то, что «…квадрат средней квадратической погрешности функции равен сумме квадратов произведений частных производных функций по каждому аргументу на среднюю квадратическую погрешность соответствующего аргумента…» формула СКП линии положения (mЛП) применительно к изолинии, выражаемой линейным уравнением U = f (x, y), будет иметь вид
(18.14)
где mЛП – СКП линии положения (мили);
mU – СКП измерения навигационного параметра;
g – градиент навигационного параметра.
Значение градиента навигационного параметра означает: на какую величину нужно ошибиться в получении (измерений) навигационного параметра, чтобы линия положения сместилась точно на одну милю.
(18.15)
Если с РЛС мы сняли расстояние до ориентира с ошибкой в 1 милю, значит, и линия положения сместится тоже на 1 милю. Из этого следует, что градиент расстояния равен единице, то есть:
gD = 1 |
(18.16) |
Если до берегового ориентира расстояние D = 1 миля, то для смещения линии положения тоже на 1 милю мы должны снять пеленг на этот ориентир с ошибкой в 1 радиан = 57,3° (если до маяка D = 57,3 мили → ошибка в пеленге = 1°).
Значит, для пеленга: