

МІНІСТЕРСТВО ОСВІТИ ТА НАУКИ УКРАЇНИ
ЗАПОРІЗЬКИЙ НАЦІОНАЛЬНИЙ ТЕХНІЧНИЙ УНІВЕРСИТЕТ
МЕТОДИЧНІ ВКАЗІВКИ
до виконання контрольних робіт з дисципліни “Автоматизація виробничих процесів в машинобудуванні” для студентів спеціальності 8.090202 „Технологія машинобудування” заочної форми навчання
2009
Методичні вказівки до виконання контрольних робіт з дисципліни “Автоматизація виробничих процесів в машинобудуванні” для студентів спеціальності 8.090202 „Технологія машинобудування” заочної форми навчання /Укл. А.В.Патюпкін – Запоріжжя: ЗНТУ, 2009.- 25 с.
Укладачі: А.В.Патюпкін, ст.викл., к.т.н.
Рецензент: О.С. Смирнов, доцент, к.т.н.
Відповідальний за випуск: А.В.Патюпкін
Затверджено
на засіданні кафедри
“Технологія машинобудування”
протокол № 2 від30.09.2009р.
-
Зміст
Стор.
1
Дослідження сталості системи автоматичного регулювання
4
2
Завдання на контрольну роботу
19
3
Рекомендована література
25
1 Дослідження сталості системи автоматичного регулювання
1.1 Мета роботи
Провести дослідження сталості системи автоматичного регулювання виконавчого механізму верстата.
1.2 Послідовність виконання роботи
1) Ознайомитися з принциповою блок-схемою автоматичної системи верстата і дати стислий опис її роботи. Варіант задається викладачем, згідно розділу 2 (Завдання на контрольну роботу).
2) Скласти функціональну схему системи.
3) Визначити передаточні функції окремих ланок і скласти структурну схему системи.
4) Визначити передаточні функції замкненої, розімкненої систем і передаточну функцію помилки.
5) Провести дослідження сталості системи за алгебраїчними (Гурвиця та Рауса) і частотним (Михайлова або Найквіста) критеріями.
6) Зробити висновки по роботі.
Роботу можна виконувати за допомогою електронно-обчислювальних машин.
1.3 Приклад виконання роботи
1.3.1 Вихідні дані
Маємо слідкуючу систему копіювально-фрезерного верстата. Блок-схема системи відображена на рис. 1.1.
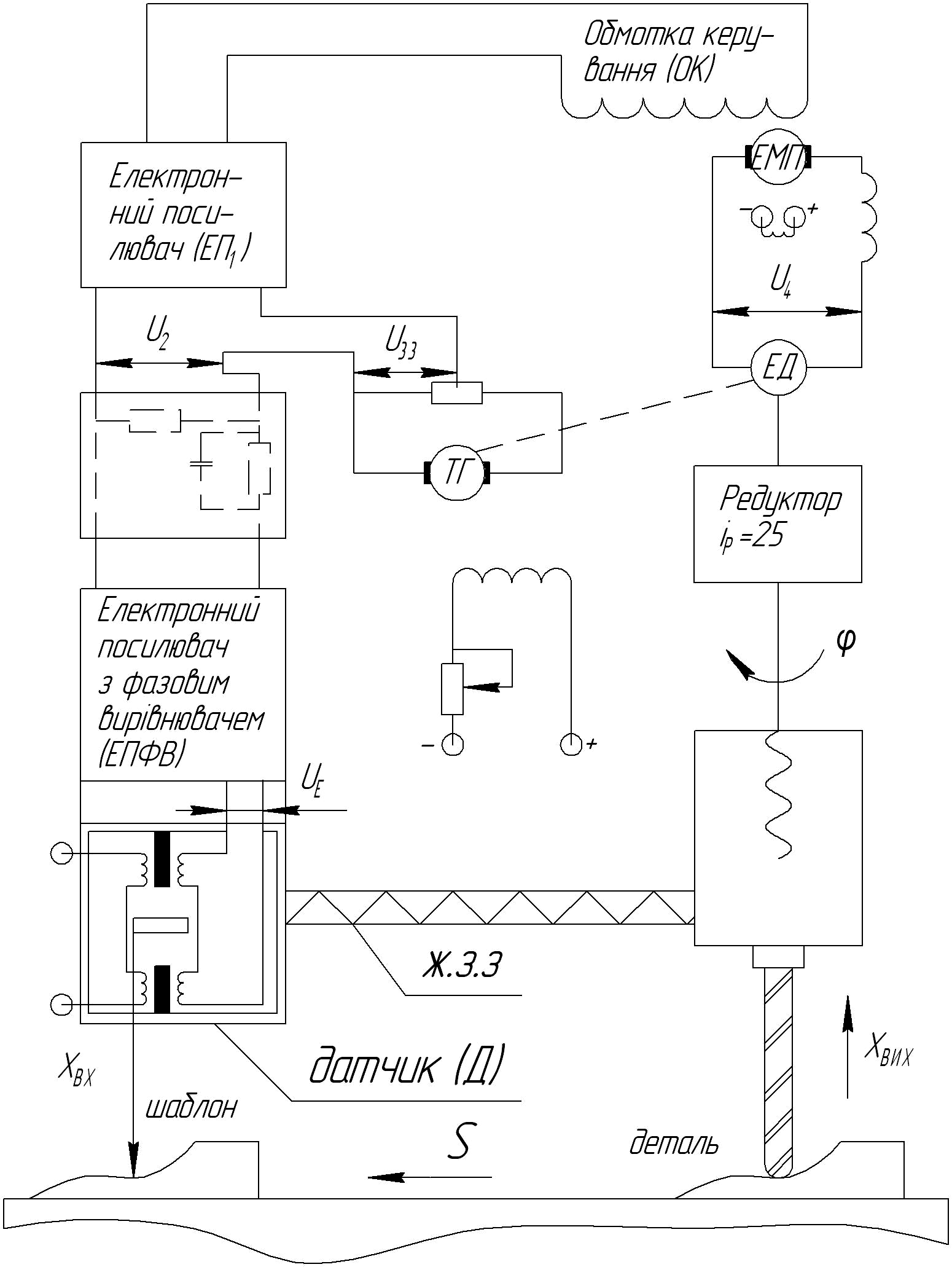
Рисунок 1.1 – Блок-схема слідкуючої системи копіювально-фрезерного верстата
Задано диференціальні рівняння окремих ланок системи:
а)
Датчик:
![]()
б) Електронний посилювач з фазовим вирівнювачем (ЕПФВ):
![]()
в)
Електронний посилювач (ЕП):
![]()
г) Ланка для коригування (КЛ):
![]()
д) Електромашинний посилювач (ЕМП):
![]()
![]()
е) Двигун з редуктором:
![]()
ж) Тахогенератор:
![]()
Задано також параметри системи:
|
КС |
Ку1 |
Ку2 |
Ке |
Кд |
Т0 |
Т |
Т1 |
Т2 |
Тм |
Кт |
α |
|
10 |
9,0 |
24 |
5,0 |
0,055 |
0,006 |
0,02 |
0,035 |
0 |
0,10 |
0,18 |
0,23 |
1.3.2 Опис роботи системи
Копіювально-фрезерний верстат призначений для обробки виробів, які мають складну просторову форму. На верстаті процес обробки відбувається за допомогою шаблону, виробленому у масштабі 1:1.
В процесі обробки виріб разом з шаблоном переміщуються у площині Х-У, а інструмент у перпендикулярному цій площині напряму.
По кривій поверхні шаблону переміщується копіювальний палець, зв'язаний з якорем диференційного індуктивного датчика. Коли якір датчика знаходиться у середньому положенні, його вихідна напруга дорівнює нулю.
Вихідний каскад електронного посилювача (ЕП) подає напругу на обмотки керування електромашинним посилювачем (ЕМП), вихідні ланцюги якого в свою чергу подають напругу на електричний двигун (Д) постійного струму з незалежним збудженням.
Якщо на вході посилювача ЕП відсутня напруга (якір датчика у середньому положенні, тобто помилка ∆х дорівнює нулю), то і на виході ЕМП напруги теж немає. Якщо якір датчика зміщується від середнього положення, виникає сигнал на його вихідних мережах, який проходить через усю систему, поступово посилюється і приводить до обертання якір двигуна, який через редуктор обертає гвинт і примушує рухатися супорт з фрезою. У цьому разі посилювач ЕПФВ видає напругу, яка має полярність відповідну до знаку розугодження. Таким чином супорт з фрезою буде рухатись у тому напрямі, у якому змістився копіювальний палець і якір індуктивного датчика.
Головний зворотній зв'язок узгоджує вхідний і вихідний сигнали, тобто переміщення якоря датчика та супорта з фрезою. Корпус датчика жорстко з'єднаний з супортом і коли супорт зміститься на таку ж величину як і копіювальний палець, то якір датчика опиниться у середньому положенні, тобто сигнал розугодження буде дорівнювати нулю.
У системі є місцевий зворотній зв'язок, який зв'язує обертання двигуна через тахогенератор з напругою, яка виходить після корегуючої ланки U2. На посилювач ЕП надходить напруга U=U2-Uзз