

TASA / TASA_RGZ8
.docxМинистерство образования и науки молодежи и спорта Украины
Запорожский национальный технический университет
Кафедра автомобилей
Индивидуальное задание
по предмету:
«Теория автоматических систем автомобиля»
Вариант - 8
Выполнил ст. гр. Т-128 А.Ю. Коваль
Принял доц. В.В. Брылёв
2012
Задача 1
Включает анализ конструкции схем фрикционных автоматических передач, использование фундаментальных принципов управления.
Фрикционная передача позволяет легко осуществить бесступенчатое регулирование скорости, вследствие чего фрикционные вариаторы получили широкое применение.
Благодаря тому, что фрикционная пара включает детали, являющиеся реальным воплощением соответствующих аксоид в относительном движении, она может наиболее точно обеспечить мгновенное значение передаточного отношения.
Не следует возлагать на фрикционную пару функции предохранительного звена при перегрузках, так как при буксовании на ведомом колесе образуется местный износ, приводящий впоследствии к возникновению вибраций и ударов, а также к интенсивному износу.
Фрикционным передачам свойственны существенные недостатки: большие давления на валы и опоры, связанные с использованием сил трения в их работе; нежесткость характеристики передачи; малая долговечность при больших давлениях; геометрическое скольжение в зонах контакта, снижающее КПД и срок службы передачи. Однако все эти недостатки могут быть в значительной степени устранены или ослаблены рациональным конструированием передач. В этом направлении проявляются следующие тенденции развития вариаторов.
1.Расширение использования принципа многоконтактности, благодаря которому мощность передается значительным количеством контактных зон, доходящим в крупных типоразмерах вариаторов до 150 и более. Использование этого принципа, например в дисковых вариаторах, позволило увеличить передаваемую мощность в конструкциях вариаторов Beier до 250 кВт и более.
Однако фрикционные вариаторы на такие мощности оказываются менее конкурентоспособными по сравнению, например с гидропередачами.
2.Изыскание новых оптимальных форм фрикционных пар, в частности, сочетание выпуклой и вогнутой поверхностей контактирующих фрикционных тел, что существенно увеличивает приведенный радиус кривизны и, следовательно, снижает контактные давления.
3.Применение многопоточных симметричных схем с замыканием усилий нажатия и разгрузкой от них валов, подшипников и корпусов, что позволяет уменьшить вес и габаритные размеры передачи и повышает ее КПД.
4.Преимущественное применение автоматически действующих нажимных устройств, исключающих излишнее нажатие фрикционных тел при недогрузках.
5.Изыскание новых материалов для фрикционных пар и совершенствование технологии изготовления. Применение стальных термообработанных до высокой твердости и шлифованных колес, а также повышение точности их изготовления.
6.Использование масляных ванн, что существенно улучшает охлаждение фрикционных пар и повышает износостойкость и долговечность колес.
7.Применение планетарных схем вариаторов, что позволяет значительно расширить диапазон регулирования и получить компактные передачи.
8.Расширение применения вариаторов в приводах с разветвленным потоком мощности, в которых потери регулируемой передачи сказываются лишь частично на общих потерях.
9.Расширение применения дистанционного и автоматического регулирования скорости.
Реализация указанных тенденций в современном вариаторостроении позволила поднять долговечность наиболее совершенных систем фрикционных вариаторов до 25000 ч и более, а также получить весьма компактные передачи.
В зависимости от геометрических и конструктивных особенностей каждый тип передачи имеет целесообразный диапазон регулирования. Проектирование передачи с диапазоном, превышающим целесообразный, значительно снижает показатели работы — КПД и долговечность передачи.
Фрикционные вариаторы, нашедшие практическое применение, разделяются на три типа: с непосредственным контактом ведущего колеса с ведомым (рис. 112, а... ж), с промежуточным элементом (рис. 112, з ... ц), планетарные.
В вариаторах первого типа в большинстве случаев одно из колес имеет постоянный диаметр. Регулируемое колесо может быть как ведущим, так и ведомым. Изменение рабочего диаметра его достигается относительным перемещением колес. Если неподвижное колесо имеет прямолинейную образующую и подвижное колесо цилиндрическое (рис. 112, а и б), то валы обоих колес остаются в неизменном положении. Во всех остальных случаях (рис. 112, в ... ж) один из валов должен перемещаться.
В вариаторах с промежуточным элементом регулирование может производиться изменением:
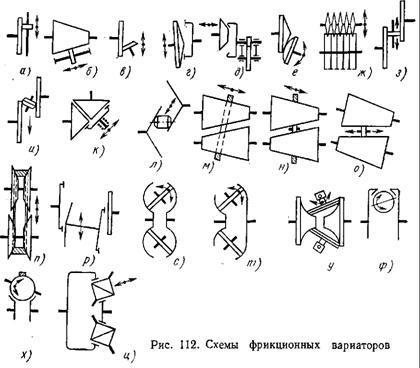
- диаметров обоих колес при неизменном диаметре промежуточного элемента-паразита (рис.112, з…п, с…у)
- радиусов качения промежуточного элемента при постоянных диаметрах ведущего колеса и ведомого (рис. 112, ф ... ц)
- радиусов одного из колес и одного из промежуточных элементов (рис. 112, р).
Передачи последнего типа являются по существу двухступенчатыми. Наиболее отчетливо это видно из сравнения схем на рис. 112, г и р.
Наличие в вариаторах с промежуточным элементом двух регулируемых колес позволяет расширить диапазон регулирования до Д = 6 ... 10. Кроме того, неизменность положения входного и выходного валов упрощает соединение вариатора .этого типа с сопряженными агрегатами.
В большинстве случаев в вариаторах с промежуточным элементом применяются многопоточные передачи — с несколькими параллельно работающими такими элементами (рис. 112, с ... ц). С применением вспомогательных зубчатых пар могут быть выполнены многопоточными также передачи по схемам, показанным на рис. 112, з, и, о. Передачи многопоточные при тех же габаритных размерах могут передавать большую мощность, и основные валы в них разгружены от радиальных сил. Однако при конструировании и выполнении этих передач важнейшим условием их работоспособности является обеспечение равномерного прижатия всех пар и высокая степень точности изготовления тел качения.
Лобовые вариаторы с цилиндрическим роликом (рис. 112, а, з) имеют значительное геометрическое скольжение и потому нецелесообразны. Применяют их лишь во второстепенных передачах малой мощности, в частности в счетно-решающих устройствах. Более целесообразны передачи с коническими роликами (рис. 112, в и). Передачи, изображенные на рис. 112, б, м, н, о, при малых углах конусов дают меньшее скольжение, но имеют большие габаритные размеры. Из вариаторов без паразитных колес получили распространение передачи, показанные на рис. 112, г, д; они несложны в изготовлении и при малых значениях Д дают удовлетворительную характеристику по скольжению.
Передачу, изображенную на рис. 112, е, применять нецелесообразно, так как расположение вершин конусов по разные стороны рабочего пояска обусловливает значительное скольжение; начальный контакт в точке ограничивает применение схемы передачами малой мощности.
Многодисковые передачи (рис. 112, ж) имеют также значительное геометрическое скольжение. Однако возможность использования большого числа параллельно работающих дисков позволяет уменьшить длину линии контакта, снизить тем самым скольжение и одновременно значительно повысить передаваемую мощность. Передачи этого типа с парами, работающими в масле, выпускаются на гораздо большие мощности, чем передачи других типов.
Передача с двумя парами раздвижных конусов (рис. 112, п) выполняется с самозатягивающимся кольцом. Она отличается значительным относительным скольжением, компактна, но работает с большими нагрузками на валы и опоры; КПД ее низкий. Передача требует тщательного изготовления. Получила ограниченное распространение в станкостроении.
В вариаторах, выполненных по схемам на рис. 112, с ... у, рабочая поверхность колес торовая. Регулирование производится наклоном роликов. Соосное расположение валов создает конструктивные удобства и компактность передачи. Нажатие осуществляется автоматическим шариковым устройством. В передачах, показанных на рис. 112, с, т, ролик расположен по диаметру его сферической поверхности. Касательная к образующей ролика в средней точке линии контакта параллельна оси, так что ролик становится аналогичным цилиндрическому катку. В связи с этим величина скольжения относительно велика. Передачи ^такого типа получили распространение при работе фрикционных пар в масле.
В передаче, показанной на рис. 112, у, ролик расположен по хордальному сечению сферы; выбором соответствующих размеров передачи можно получить весьма малое скольжение. Недостатком всех торовых вариаторов является сложность изготовления колес.
В шаровых вариаторах (рис. 112, ф, х) рабочие поверхности обоих колес конические; промежуточные элементы — шары. Регулировка скорости производится наклоном оси вращения шаров. Вариаторы отличаются значительным диапазоном регулирования но вследствие точечного контакта в парах применимы при относительно небольшой мощности.
В вариаторах с коническими роликами (рис. 112, ц) начальный контакт линейный, благодаря чему их нагрузочная способность больше, чем шаровых.
Все передачи с большим геометрическим скольжением, а также с начальным контактом в точке должны работать в масляной ванне. Из рассмотренных на рис. 112 передач хорошо работают без смазки лишь торовые (рис. 112, у) и достаточно надежно передачи, изображенные на рис. 112, г, д, р. Для неответственных передач малой мощности иногда делают также сухими передачи, показанные на рис. 112, а ... в, е, з, к; долговечность их низкая.
Передачи, изображенные на рис. 112, д, м, н, п, относятся к типу самозатягивающихся; все они при ускорениях пробуксовывают. Передачи, показанные на рис. 112, г, к, р и частично на рис. 112, ж, выполняются с нажатием пружинами. В них нажатие не зависит от нагрузки и поэтому им свойственны отмеченные выше недостатки подобного способа нажима. В остальных типах передач необходимое нажатие может быть осуществлено различными методами.
При установке шарикового или винтового нажимного устройства на обоих валах передачу можно сделать не пробуксовываемой при ускорениях, возникающих как на одном, так и на другом валу. Исключением являются передачи с одним цилиндрическим колесом (рис. 112, а, б), в которых на этом колесе подобное устройство установить нельзя.
Условие постоянства запаса сцепления или постоянства обусловливающее хорошую работу фрикционной пары на всех скоростных режимах, выраженное зависимостью (200), обеспечивается лишь в передачах, изображенных на рис. 112, ф, х. Достаточно хорошо оно соблюдается в передачах, показанных на рис. 112, у, ц. Во всех остальных передачах и при установке шарикового нажимного устройства постоянства этого отношения получить нельзя.
Задача 2
По передаточной функции определить тип динамического звена и построить график переходной функции, привести примеры использования звена в автоматических системах автомобиля.
Заданная передаточная функция имеет вид:

Для определения динамического звена необходимо сравнить заданную передаточную функцию с передаточными функциями типовых звеньев и определить, какому звену она принадлежит.
Заданная передаточная функция принадлежит запаздывающему звену, передаточная функция которого имеет вид:

где к=3.
Уравнение, которое определяет выходную величину в зависимости от входной для запаздывающего звена, имеет вид:
Подставив значения x(t) =(1, 0), а t =0…∞, получим следующее уравнение:

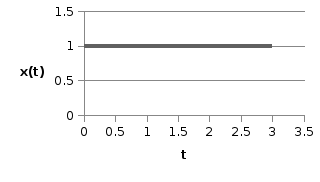
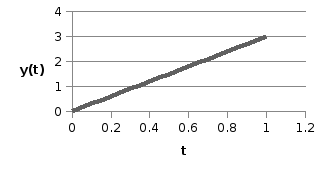
Рисунок 2.1 – График функции
Задача 3
Определить амплитудно-фазовую (АФХ), амплитудно-частотную (АЧХ) и фазо-частотную (ФЧХ) характеристики по известной передаточной функции.
Заданная передаточная функция:

к =1
τ=0,1
Для решения этой задачи используется аналитический метод получения характеристик:
1) в передаточной функции заменить оператор Лапласа «р» на «iω»:
Используя преобразования Эйлера, получаем:

2) в полученном многочлене необходимо сгруппировать члены, не содержащие мнимости, которые формируют вещественную часть Re(ω), и отдельно члены, содержащие i, которые дадут мнимую часть многочлена Im(ω):

3) определяют значение вещественной и мнимой части для 8 значений ω от нуля до бесконечности (табл. 3.1), по которым строится амплитудно-фазовая характеристика (рис. 3.1).
Таблица 3.1 – Значения вещественной и мнимой части
|
ω |
Re (ω) |
Im(ω) |
|
0 |
1,00 |
0,00 |
|
7,85 |
0,62 |
-0,49 |
|
15,7 |
0,29 |
-0,45 |
|
23,55 |
0,15 |
-0,36 |
|
31,4 |
0,09 |
-0,29 |
|
39,25 |
0,06 |
-0,24 |
|
47,1 |
0,04 |
-0,20 |
|
54,95 |
0,03 |
-0,18 |
|
∞ |
0,00 |
0,00 |
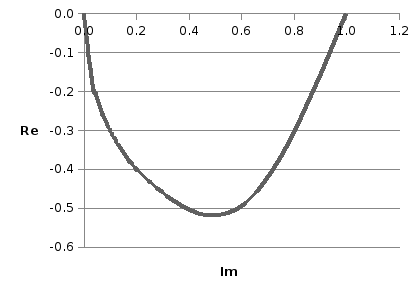
Рисунок 3.1 – Амплитудно-фазовая характеристика
Для построения АЧХ используют выражение:

где
Подставив значения вещественной и мнимой частей в уравнение АЧХ, получим:


Таблица 3.2 – Значения частоты
|
ω |
W(ω) |
|
0 |
1 |
|
7,85 |
0,79 |
|
15,7 |
0,54 |
|
23,55 |
0,39 |
|
31,4 |
0,30 |
|
39,25 |
0,25 |
|
47,1 |
0,21 |
|
54,95 |
0,18 |
|
∞ |
0 |
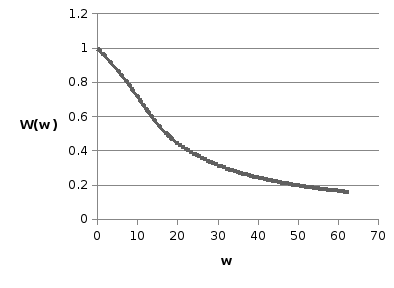
Рисунок 3.2 – Амплитудно-частотная характеристика
Фазо-частотная характеристика определяется по формуле:
Подставив значения вещественной и мнимой частей в уравнение (3. ), получим:

Подставляя
значения
 от нуля до бесконечности, получим данные
для построения ФЧХ (табл.3.3), изображённой
на рис.3.3.
от нуля до бесконечности, получим данные
для построения ФЧХ (табл.3.3), изображённой
на рис.3.3.
Таблица 3.3 – ФЧХ
|
ω |
0 |
7,85 |
15,7 |
23,55 |
31,4 |
39,25 |
47,1 |
54,95 |
∞ |
|
|
0 |
-0,67 |
-1 |
-1,17 |
-1,26 |
-1,32 |
-1,36 |
-1,39 |
-∞ |

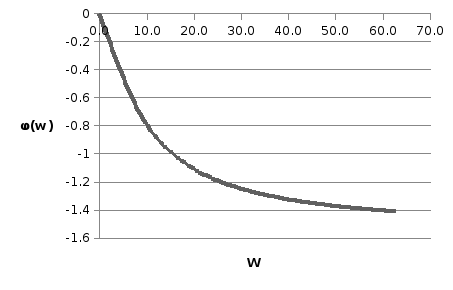
Рисунок 3.3 – Фазо-частотная характеристика
Задача 4
Определить устойчивость автоматической системы скоростью движения сборочного конвейера по частотному критерию:

где
 – коэффициент передачи или усиления;
– коэффициент передачи или усиления;
Ту = 0,01с – постоянная времени усилителя системы;
Тд = 0,6 с – постоянная времени тягового двигателя.
Устойчивость автоматических систем определяется при использовании частотного критерия Михайлова для замкнутых систем. Для этого определяется характеристический многочлен из передаточной функции путём суммирования числителя со знаменателем. Затем, в полученном замкнутом многочлене оператор Лапласа «р» заменяется на «iω» и в полученном выражении группируются вещественная и мнимая части:









В полученные выражения подставляются константы в зависимости от варианта и определяются их значения для 8…10 значений частоты (табл. 4.1).


Таблица 4.1 – Данные для построения годографа
|
ω |
0 |
2 |
4 |
6 |
8 |
10 |
12 |
14 |
16 |
|
QRe(ω) |
62 |
60 |
52 |
40 |
23 |
1 |
-26 |
-58 |
-94 |
|
QIm(ω) |
0 |
2 |
4 |
5 |
5 |
4 |
2 |
-2 |
-9 |

Рисунок 4.1 – Рикограф Михайлова
Данная система устойчива, т.к. её рикограф удовлетворяет всем условиям устойчивости. При изменении частоты =0…. рикограф начинается на вещественной полуоси, вращается против часовой стрелки, нигде не обращается в ноль и переходит в п – ому квадранте в бесконечность, де п =3 – степень многочлена.
Задача 5
Произвести преобразование системы автоматического регулирования по звеньям и их передаточным функциям.

Рисунок 5.1 – Заданная структурная схема



Список использованной литературы
-
Зайцев Г.Ф. Теория автоматического управления и регулирования. - К.: Выща школа, 1989.-431с.
-
Метлюк Н.Ф. Автоматика и автоматизация производственных процессов. - Минск: Высшая школа, 1985.-301с.
-
Мельников А.А. Теория автоматического управления техническими объектами автомобилей и тракторов. - М.: Изд. центр «Академия», 2003.-280с.
-
Мельников А.А. Управление техническими объектами автомобилей и тракторов. - М.: Изд. Центр «Академия», 2003.-304с.
-
Петров В.А. Автоматические системы транспортных машин. - М.: Машиностроение, 1974.-336с.
-
Туричин А.М. Электрические измерения неэлектрических величин. - Л.: Энергия, 1975.-462с.
-
Методичні вказівки до виконання лабораторних робіт з дисциплін “Основи теорії автоматичних систем автомобіля” та “Автоматичне регулювання ДВЗ” для студентів спеціальностей 7.090211 “Колісні та гусеничні транспортні засоби” та 7.090210 «Двигуни внутрішнього згоряння» денної та заочної форм навчання./Укл.: В.В.Брильов., Г.В.Борисенко – Запоріжжя: ЗНТУ, 2007.