

Шпоры / Шпоры по физике 1 семестр / Готовые шпоры / Бланк2
.DOC|
Билет №9 «Соударения тел. Удар абсолютно упругих и неупругих тел…» Рассмотрим процессы столкновения тел. При столкновении происходит их кратковременное взаимодействие, сопровождающееся как деформацией, так и изменением направления их движения. Примерами являются упругое и неупругое соударения. При рассмотрении столкновений необходимо знать форму тел, массы покоя, скорости движения и их упругие свойства. Простейшим видом соударения является центральный удар тел. При этом ударе тела движутся только поступательно, их скорость направлена по прямой, соединяющей центры масс (рис. 1.12). Если удар абсолютно неупругий, т.е. такой удар, после которого скорость соударяющихся тел оказывается одинаковой, то
рассматриваемая механическая система является диссипативной ( В диссипативных системах происходит рассеяние механической энергии, т.е. преобразование механической работы в другие виды передачи энергии.) и для нее неприменим закон сохранения механической энергии, а применим лишь закон сохранения импульса: р1 + р2 = p Для центрального неупругого удара это соотношение можно переписать в виде
[v1 и v2- скорость тел, масса которых до взаимодействия m1 и m2]. Из формулы (1.40) следует, что после взаимодействия тела будут двигаться как единое целое со скоростью
Для неупругого удара не выполняется закон сохранения механической энергии, но справедлив закон сохранения энергии, т.е. полная энергия рассматриваемой изолированной системы (сумма всех видов энергии, включая и собственную энергию масс покоя всех частиц) до и после столкновения остается неизменной. При абсолютно упругом столкновении не происходит потеря кинетической энергии, так как в этом случае нет деформации, на которую расходуется часть энергии. → №9 |
Вопрос №10 «Динамика вращательного движения абсолютно твёрдого тела относительно неподвижной оси: момент силы, момент импульса, импульс момента силы. Центр масс» 1) Динамика вращательного движения абсолютно твердого тела
№10
№10
|
Билет №11 «Основной закон динамики вращательного движения»
Как известно dMz / dt = Nвнеш z и Mz = I ώz , где Mz и Nвнеш z - момент импульса и суммарный момент внешних сил относительно оси Z , I – момент инерции твердого тела отн. Z Если продифференцировать псоледнее Ур-ние по времени, тогда I βz = Nz (*) Nz - это суммарный момент всех внешних сил относит. оси вращения. Моменты сил относит. оси – величины алгебраические: их знаки зависят как от выбора положительного направления оси Z (совпадающей с осью вращения), так и от направления «вращения» соответствующего момента силы. Интегрирование ур-ния (*) с учетом начальных условий – значений ώ0 z и φ 0 в нач. момент времени – позволяет полностью решить задачу о вращении твердого тела вокруг неподвижной оси, т.е. найти зависимость от времени угловой скорости и угла поворота. Ур-ние (*) справедливо в любой системе отсчета, жестко связанной с осью вращения. Однако, если система отсчета неинерциальная, то момент сил Nz включает в себя не только моменты сил взаимодействия с другими телами, но и моменты сил инерции
№11
№11
|
||
|
Билет №12 «Закон сохранения момента импульса. Гироскопы. Гироскопический эффект.»
Если
на тело действует М(момент силы), то
L-
импульс момента силы.
В замкнутой системе полный момент импульса тела постоянная величина.
Свободные оси вращения тел. Для любого тела можно выделить 3 оси его вращения. Любое тело обладающее большой массой, способное вращаться относительно одной из своих осей называется гироскоп. Применение гироскопа (самолеты, ракеты корабли)
M=mgl*sin
Скорость процессии(поворот вокруг вертикальной оси)
№12 №12 |
Билет №13 "Работа, мощность, кинетическая энергия при вращательном движении твердого тела вокруг неподвижной оси. Закон сохранения энергии. Полная кинетическая энергия твердого тела" 1)Работа, мощность, кинетическая энергия при вращательном движении твердого тела вокруг неподвижной оси. Линейная
скорость элементарной массы равна
Следовательно,
для кинетической энергии i-й
элементарной массы получается
выражение
Кинетическая
энергия тела слагается из кинетических
энергий его частей:
Сумма в правой части отношения – момент инерции тела I .
Пусть
на массу действуют внутренняя сила
→
№13 №13 |
Билет №14 "Колебания. Собственные незатухающие гармонические колебания. Амплитуда, частота, период, фаза. Уравнения и графики" 1) Колебания Многократно повторяющийся процесс движения тела или его состояния называется колебанием. 2) Собственные незатухающие гармонические колебания Собственные колебания возникают только под действием упругой или квазиупругой (почти) силы. Гармонические колебания – колебания при которых колеблющаяся величина изменяется со временем по закону синуса (косинуса). 3) Амплитуда, частота, период, фаза. Уравнения и графики x(t)=Acos(ωt+φ0) – ур-е гармонического колебания, где (ωt+φ0) – фаза колебений( при времени t ) φ0 – начальная фаза колебаний ( при t=0) ω – циклическая(круговая) частота колебаний А – амплитуда (max. отклонение от положения равновесия) ω=2πν=2π/T ν – частота (кол-во колебаний за 1 сек.) T - период (время 1 колебания) x’= v =Aωsin(ωt+φ0)=dx/dt x’’= a = Aω 2 sin(ωt+φ0)=dx2/d2t ma=-kx <=> mx’’+kx=0 <=> x’’+ xk/m=0 <=>x’’ + ω2 x=0 <=> dx2/d2t + ω2 x =0 – дифференциальное ур-е гармон. колебаний Графики:x(t)=Asin(ωt+φ0) , v(t) , a(t)
№14
|
||
|
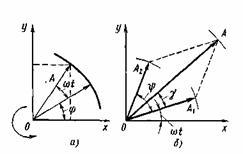
Билет №15 «Скорость и ускорение и энергия гармонических колебаний» Гармонические колебания можно графически представить с помощью круговой диаграммы (рис. 6, а). В данном случае с постоянной угловой скоростью W вращается на плоскости вектор длиной A. Угол φ характеризует начальное положение вектора. Проекция вектора на ось ординат характеризуется уравнением (1).
При гармонических колебаниях скорость и ускорение изменяются также по гармоническому закону:
Амплитуда скорости равна WA, амплитуда ускорения W2A. В технической литературе U, Vи W называют соответственно виброперемещением, виброскоростью и виброускорением. Уравнение (1) часто используют в следующем виде:
где
→
№15 №15 |
Билет №16 «Математический и физический маятники. Уравнения динамики их колебаний. Приведенная длина физического маятника»
1 Если
α→0 => свободное
положение
2
№16 №16 |
|
 =>
=>

 Рисунок
6
Круговая диаграмма:
а -схема, б -
амплитуда колебаний и фаза λ
Рисунок
6
Круговая диаграмма:
а -схема, б -
амплитуда колебаний и фаза λ