

Meтoдмaтepiaли ПРИКЛАДНА МЕХАНІКА / metod4a
.docМетодичні вказівки для вирішення задач з кінематичного
розрахунку привода
Задача
Скласти схему та дати кінематичний та силовий аналіз привода, що складається з електродвигуна, клинопасової передачі, одноступінчастого прямозубого циліндричного редуктора та ланцюгової передачі, якщо відомі частота обертання вала електродвигуна n1 (хв-1), потужність, яку він витрачає при роботі привода P1 (кВт), а також передаточні числа і коефіцієнти корисної дії передач привода: u1, u2, u3, 1, 2, 3. Також задані: коєфіцієнт пружного ковзання для клинопасової передачі (діаметр ведучого шківа клинопасової передачі (d1число зубців ведучої зірочки ланцюгової передачі (z1). Визначити дiаметри валiв привода з розрахунку на кручення, якщо вiдомо, що вали виготовлено зі сталi 45 (допустиме напруження на кручення - [] = 25 MПа).
Розв’язок
-
Складаємо кінематичну схему привода і нумеруємо вали.

-
Визначаємо частоту обертання валів привода:
-
n1, хв-1- задане за умовою задачі;
-
 = ... = ... хв-1;
= ... = ... хв-1; -
 = ... = ... хв-1;
= ... = ... хв-1; -
 = ... = ... хв-1;
= ... = ... хв-1;
-
Визначаємо кутову швидкість валів привода:
-
![]() = ... = ... с-1;
= ... = ... с-1;
-
![]() = ... = ... с-1;
= ... = ... с-1;
-
![]() = ... = ... с-1;
= ... = ... с-1;
-
![]() = ... = ... с-1;
= ... = ... с-1;
4) Визначаємо потужність на валах привода:
- P1, кВт - задане за умовою задачі;
- P2 = P1·кВт;
- P3 = P2·2кВт;
- P4 = P3·3кВт;
-
Визначаємо обертальний момент на валах привода:
-
![]() = кH·м;
= кH·м;
- Т2 = Т1··uкH·м;
- Т3 = Т2·2·u2кH·м;
- Т4 = Т3·3·u3кH·м;
-
Визначаємо обертальний момент на валах привода:
-
![]() м;
м;
-
![]() м;
м;
-
![]() м;
м;
-
![]() м;
м;
де T – підставляємо в H·м, [] – в Па.
Додаткові завдання
В залежності від варіанта в задачі може бути задано:
-
Визначити діаметр веденого шківа плоскопасової (або клинопасової) передачі:
d2 = d1·uпп·(1 - ;
де uпп – передаточне відношення плоскопасової (або клинопасової)
передачі.
d1 i d2 – відповідно діаметри ведучого і веденого шківів
передачі.
-
Визначити число зубців веденої зірочки ланцюгової передачі:
z2 = z1·uлп;
де uлп – передатнє відношення ланцюгової передачі;
z1 i z2 – відповідно числа зубців ведучої та веденої зірочок.
-
Якщо в умові задачі не задані явно передатні відношення, то необхідно їх визначити за формулами:
-
для зубчастих або ланцюгових передач:
![]() ;
;
де z1 i z2 – відповідно числа зубців ведучого та веденого зубчастих
коліс (або ведучої та веденої зірочок).
-
для плоскопасових або клинопасових передач:
![]() .
.
Для прикладу приведемо описи кінематичних схем, що позначені на рис.1. цифрами в окружностях:
1 – електродвигун, клинопасова передача, одноступеневий циліндричний косозубий зубчастий редуктор, ланцюгова передача;
2 – електродвигун, плоскопасова передача, одноступеневий конічний зубчастий редуктор, ланцюгова передача;
3 – електродвигун, ланцюгова передача, одноступеневий черв’ячний редуктор з нижнім розміщенням черв’яка, відкрита циліндрична прямозуба зубчаста передача;
4 – електродвигун, муфта, двохступеневий циліндричний співвісний зубчастий редуктор, відкрита конічна зубчаста передача;
5 – електродвигун, клинопасова передача, одноступеневий черв’ячний редуктор з верхнім розміщенням черв’яка, відкрита конічна зубчаста передача;
6 – електродвигун, муфта, двохступеневий циліндричний зубчастий редуктор, відкрита циліндрична зубчаста передача;
7 – електродвигун, муфта, двохступеневий конічноциліндричний зубчастий редуктор, ланцюгова передача.
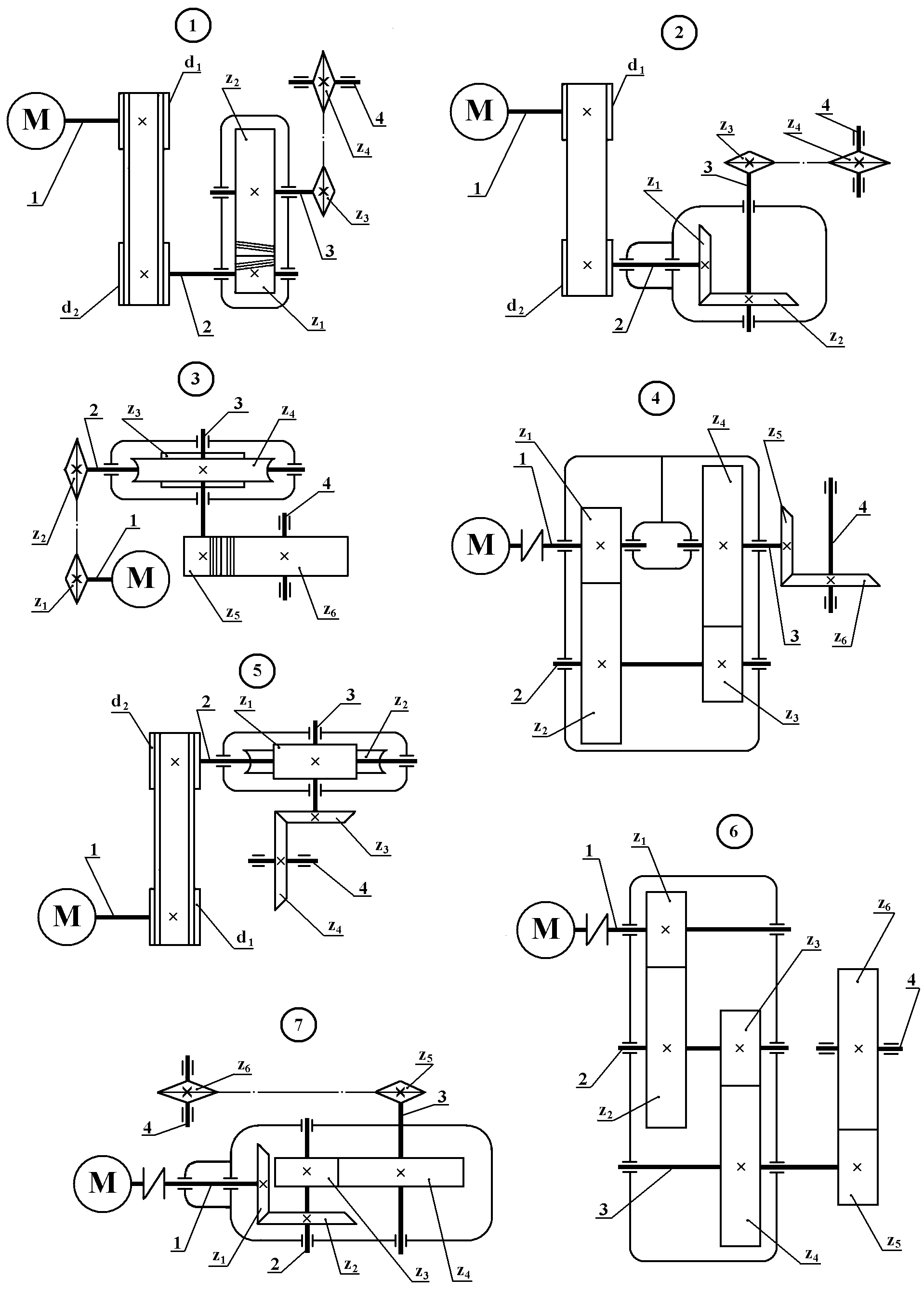
Рис. 1. Кінематичні схеми приводів технологічних машин.