

2.2.4. Интерфейсы управления
Одним из интерфейсов, через которые возможно управление аппаратурой КСМ‑400, является RS232C. RS232C интерфейс представляет собой асинхронный стык V.24, работающий на скоростях 9600 кбит/с, 19200 кбит/с и 38400 кбит/с. Управление аппаратурой КСМ‑400 возможно через следующие виды интерфейсов:
-
RS232C;
-
Е1 (2048 кбит/с).
RS232C интерфейс представляет собой асинхронный стык V.24, работающий на скоростях 9600 кбит/с, 19200 кбит/с и 38400 кбит/с. RS232C выведен на переднюю панель на девяти контактную вилку и на кроссовый разъём плат УМ‑16. Для подключения ПК к аппаратуре можно воспользоваться шнуром, содержащемся в ЗИП КСМ‑400 №1 (подключение к передней панели) или собрать шнур из деталей КМЧ на плату УМ‑16 (подключение через кроссовый разъём). Не допускается подключение ПК к плате УМ-16 одновременно с двух сторон: к разъему на передней панели и к кроссовому разъему. Если в блок КСМ‑01 установлены две платы УМ‑16, то ПК можно подключить к любой из них. При одновременном подключении сразу двух ПК, аппаратура работает с тем из них, который в данный момент проявляет активность (производит обмен данными).
Аппаратурой КСМ‑400 можно управлять также через интерфейс Е1 любой платы ВС‑4Е1. При этом управление возможно следующими способами:
-
через КИ16 в составе сигнализации ОКС №7;
-
через произвольный коммутируемый КИ;
-
через национальные биты.
При управлении через ОКС №7 команды управления и данные передаются в поле _____. Скорость передачи данных при этом невелика и не превышает ____ кбит/с. В связи с тем, что ОКС используется для обеспечения телефонных соединений, скорость передачи управляющей информации сильно зависит от нагрузки канала ОКС. В связи с этим, данный способ рекомендуется использовать только для оперативного управления сетью аппаратуры и мониторинга сети станций. Для осуществления перепрограммирования станций, переконфигурирования, считывания тарификационной и статистической информации, в общем в процессах связанных с большими объёмами информации, лучше использовать доступ через коммутируемый канал или через чуть менее скоростной канал, организуемый на основе национальных битов.
2.2.5. Синхронизация АТС КСМ-400
Синхронизация КСМ‑400 предназначена для обеспечения устойчивой работы аппаратуры с другим оборудованием, а так же при создании сети станций.
Возможна работа станции в следующих режимах:
-
режим “ведущей”;
-
режим “ведомой”.
В режиме “ведущей”, станция синхронизируется от генератора платы УМ‑16. В режиме “ведомой”, КСМ‑400 синхронизируется от одного из следующих сигналов:
-
сигнал синхронизации, частотой 2048 кГц, поступающий на стык G703.10;
-
входной сигнал 2048 кбит/с (Е1), поступающий на выбранный вход одной из плат ВС‑4Е1.
Синхронизация аппаратуры КСМ‑400 обеспечивается на уровне блока КСМ‑01 и установленных в него плат. Все платы, установленные в один и тот же блок работают на одной частоте – 4096 кГц (С4М). Все цифровые интерфейсы синхронизируются на основе данной частоты. В связи с этим, передаваемый сигнал всех цифровых интерфейсов имеет постоянное относительное значение фазы. Вследствие этого, для обеспечения нормальной работы аппаратуры, предотвращения потери и искажения данных, вся сеть оборудования, в которую включена АТС КСМ‑400, должна иметь единый источник синхронизации. В случае работы станции КСМ‑400 в режиме “ведущей”, глобальным источником синхронизации является сама станция.
Схема синхронизации на уровне блока КСМ‑01 и входящих в него плат показана на рисунке 3.
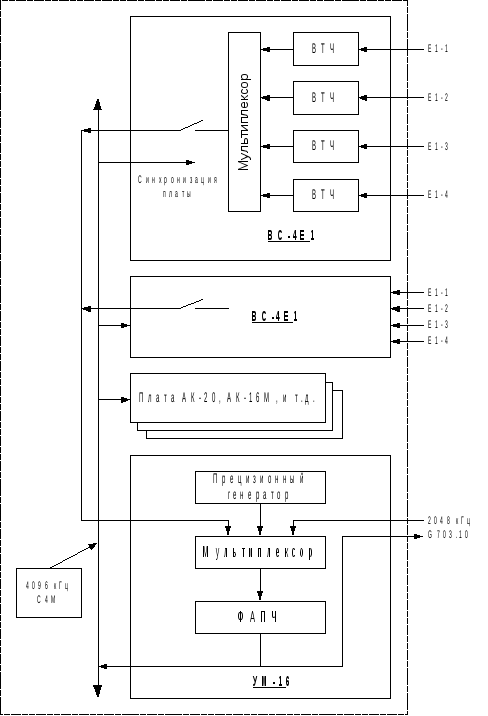 Рисунок
3 – Синхронизация КСМ‑400.
Рисунок
3 – Синхронизация КСМ‑400.
Как видно из рисунка устройством, определяющим синхронизацию всей станции, является плата УМ‑16. Именно плата УМ‑16 генерирует сигнал С4М частотой 4096 кГц. Генерация данного сигнала производится на основе:
-
выделенной тактовой частоты из входного сигнала Е1;
-
сигнала от прецизионного генератора;
-
входного сигнала 2048 кГц.
Выделение тактовой частоты из входного сигнала Е1 производится с помощью ВТЧ, расположенных на каждой плате ВС‑4Е1. На плате ВС‑4Е1 по заданному алгоритму производится выбор сигнала от одного из Е1. При пропадании сигнала Е1 производится автоматическое переключение источника синхронизации на другой, безаварийный сигнал. При отсутствии работоспособных сигналов Е1 выход синхронизации платы ВС‑4Е1 автоматически отключается. Алгоритм выбора входных сигналов Е1 следующий. Каждому входному сигналу присваивается параметр – приоритет с 0 по 4. При приоритете равном нулю, синхронизация от входного сигнала не разрешается. Один и тот же приоритет не равный нулю у двух и более сигналов не допускается. Мультиплексор подключает на выход сигнал выделенной тактовой частоты от того источника, который имеет наибольший приоритет. Конечно, источники с нулевым приоритетом или отсутствием входного сигнала не рассматриваются. При отсутствии работоспособного источника с ненулевым приоритетом, выход синхронизации платы ВС‑4Е1 автоматически отключается. Включение выхода может производиться только по команде от платы УМ‑16.
Плата УМ‑16 имеет возможность принудительного отключения/подключения выходов синхронизации плат ВС‑4Е1. Это позволяет производить переключение источников синхронизации на уровне плат. Переключение с одной платы на другую может производиться в следующих случаях:
-
при пропадании всех доступных источников синхронизации на плате, осуществлявшей перед этим синхронизацию блока;
-
при появлении источника синхронизации на плате, имеющей больший приоритет, чем плата текущего источника;
-
по команде оператора.
Плата УМ‑16 производит автоматическое переключение источников синхронизации по такому же алгоритму, как и на плате ВС‑4Е1.
ФАПЧ платы УМ‑16 выполняет следующие функции:
-
подстройка частоты работы станции под частоту выбранного источника синхронизации;
-
исключение скачков фазы синхронизирующей частоты станции в моменты переключения источников синхронизации;
-
удержание частоты синхронизации станции при пропадании всех внешних источников синхронизации с последующим плавным переходом в режим автогенерации;
-
подавление дрожания сигнала (джиттера) источника синхронизации.
Сигнал синхронизации 2048 кГц принимается и передаётся через плату УМ‑16. Сигнал выводится на два разъёма. Один из них расположен на передней панели, другой – со стороны кросса. Оба этих разъёма электрически соединены. При использовании двух плат УМ‑16 в одном блоке, можно подключать внешний сигнал синхронизации к разъёму любой из двух плат. Автоматически синхронизация производится от того сигнала, который проявляет активность в данный момент. Передаваемый сигнал 2048 кГц на обоих платах одинаков. Параметры выхода стыка синхронизации в таблице 1.
Таблица 1 – Параметры выходного стыка сигнала синхронизации.
|
Параметр |
Сопротивление нагрузки 75 Ом |
Сопротивление нагрузки 120 Ом |
|
Частота сигнала |
2048 кГц 50 ppm |
|
|
Максимальная амплитуда , В (V) |
1,5 |
1,9 |
|
Минимальная амплитуда, В (V1) |
0,75 |
1,0 |
|
Максимальное значение джиттера |
0,05 |
|

Рисунок 1 – Маска выходного сигнала синхронизации 2048 кГц.
Параметры входного стыка следующие:
Таблица 2 – Параметры входного стыка интерфейса синхронизации.
|
Параметр |
Значение |
|
Входное сопротивление |
?????????? |
|
Максимальное затухание входного сигнала |
0-6 дБ |
|
Затухание отражения, не менее |
15 дБ |
Точность прецизионного генератора определяется модификацией платы УМ‑16. Параметры генератора приведены в таблице 3.
Таблица 3 – Параметры прецизионного генератора
|
Параметр |
УМ‑16 |
УМ‑16‑01 |
|
Температурная нестабильность частоты в интервале температур от 0°С до +70°С |
не более 2*10–5 |
не более 2,5*10–8 |
|
Долговременная нестабильность частоты за год |
не более 2*10–5 |
не более 1*10–7 |
|
Время установления частоты |
— |
не более 5 мин. |