

Задача 5
Рассматривается система автоматического регулирования уровня связующего (или любой иной жидкости) в баке. Объект регулирования (ОР) – бак (рис 3), регулируемый параметр – уровень H. Возмущающим воздействием, нарушающим материальный баланс и приводящим к отклонению уровня от заданного Hзад, является измерение нагрузки аппарата, т.е. расход связующего Gp. Уровень жидкости измеряется с помощью датчика LE. На основе сравнения текущего значения уровня H с заданным Hзад автоматический регулятор (АР) LС вырабатывает управляющее воздействие, приводящее в движение исполнительный механизм (ИМ) и регулирующий орган (РО), изменяющее, в свою очередь, приток Gп жидкости в бак.
Вместо текущих значений переменных H, Gп и Gp удобно рассматривать их отклонения от некоторого исходного состояния:
y = H - Hзад – отклонение уровня от заданного значения (выходной параметр);
f = Gp - Gpo – отклонение расхода относительно начального значения (возмущение);
x = Gп - Gпo – отклонение притока относительно начального значения (управляющее воздействие).
Тогда
дифференциальное уравнение объекта
(ОР) может быть записано так: Т =
 + y
= kx*
x
– kf*
f,
+ y
= kx*
x
– kf*
f,
где t – текущее время;
Т – постоянная времени ОР;
kf – коэффициент передачи ОР по каналу возмущения;
kx– коэффициент передачи ОР по каналу управления.

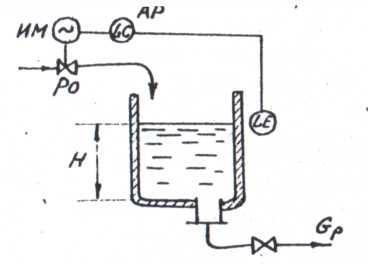
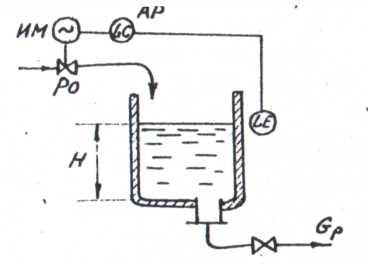
Рис. 3. Схема системы автоматического
регулирования
Предполагается, что возмущающее воздействие имеет вид неединичного скачка f(t) = f * 1(t),
где
f
= const,
а

В задаче требуется:
-
представить ОР в виде структурной схемы и определить передаточные функции по каналам управления Wх(p) и возмущения Wf(p);
-
рассчитать и построить кривую переходного процесса y(t) в ОР в отсутствие автоматического регулятора (АР), если возмущение имеет вид неединичного скачка заданной величины f;
-
составить структурную схему системы автоматического регулирования (САП) и найти передаточную функцию замкнутой САП по каналу возмущения;
-
рассчитать и построить кривую переходного процесса y(t) в системе с АР при скачкообразном изменении возмущения на величину f;
-
оценить влияние АР на изменение времени переходного процесса в ОР;
-
сделать соответствующие выводы.
Решение
Рассмотрим пример расчета для следующих исходных данных:
Т = 10; kf = 4,5; kx = - 1,5; f = 2*10-2; параметр П-рег. Kр = 2; параметры ПИ-регулятора – Kр = 2; Тиз = 5.
1. Анализ объекта регулирования.
Запишем уравнение движения объекта в операторной форме:
Трy(p) + y(p) = kx x(p) - kfF(p),
или
Y(p)(Tp+1) - kx x(p) - kfF(p).
Отсюда
Y(p)
=
 -
- = Wx(p)x(p)
– Wf(p)F(p),
= Wx(p)x(p)
– Wf(p)F(p),
где Wx(p) – передаточная функция ОР по управляющему воздействию;
Wf(p) – передаточная функция ОР по возмущению.
Тогда структурную схему ОР можно представить в таком виде (рис. 4)

Рис. 4. Cтруктурная схема ОР
2. Построение переходного процесса y(t) в ОР в отсутствие автоматического регулятора (АР) в случае, когда возмущение имеет вид неединичного сигнала f(t) = f * 1t = 2*10-2* 1t.
Положим в исходном уравнении x(t) =0. Тогда получим
Т + y
= - kfF
+ y
= - kfF
Решением этого уравнения является функция
y(t)
= kff
(1 -
 )
= 9*10-2
(1
-
)
= 9*10-2
(1
-
 )M.
)M.
Расчет переходного процесса следует ввести для интеграла времени
0 ≤ t ≤ 5T = 50 c.
Выберем
шаг по времени
 .
.
Данные расчета сведем в таблицу 7
|
t,c |
0 |
5 |
10 |
15 |
20 |
|
|
0 |
0,5 |
1 |
1,5 |
2 |
|
|
1 |
0,610 |
0,37 |
0,22 |
0,14 |
|
1
-
|
0 |
0,39 |
0,63 |
0,78 |
0,86 |
|
y=
4,5*2*10-2
*(1
-
|
0 |
-3,54*10-2 |
-5,68*10-2 |
-7*10-2 |
-7,78*10-2 |



 )M
)M
|
25 |
30 |
35 |
40 |
45 |
50 |
|
2,5 |
3 |
3,5 |
4 |
4,5 |
5 |
|
0,08 |
0,05 |
0,03 |
0,02 |
0,01 |
0,07 |
|
0,92 |
0,95 |
0,97 |
0,98 |
0,99 |
0,993 |
|
-8,26*10-2 |
-8,55*10-2 |
-8,73*10-2 |
-8,84*10-2 |
-8,9*10-2 |
-8,94*10-2 |
По
данным табл. 7 строится график y(t)
(рис. 5). Из графика видно, что yуст
= - kff
= 0,9м, а время регулирования (с точностью
δ = ±0,05yуст)
равно tп
 30
с.
30
с.