

МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РФ
ГОУВПО «Пензенский государственный университет»
Факультет машиностроения, транспорта и энергетики
Кафедра « Металлообрабатывающие станки и комплексы»
Пояснительная записка
к курсовой работе
на тему: «Модернизация токарно-винторезного станка»
по дисциплине «Металлорежущие станки»
Выполнил: студент группы 07ММ1
Гулиманов М.А.
Проверил: Кожевников В.В.
Пенза 2011
Реферат
Данная расчётно-пояснительная записка содержит 20 листов формата А4, 2 рисунка, 3 таблицы, 2 листа формата А1.
СТАНОК, ШПИНДЕЛЬ, ПРИВОД ГЛАВНОГО ДВИЖЕНИЯ, ГРАФИК ЧАСТОТ ВРАЩЕНИЯ, ДИАМЕТРЫ ВАЛОВ, МОДУЛИ ЗУБЧАТЫХ КОЛЕС
В курсовой работе произведен расчет и проектирование привода главного движения и привода подач токарно-винторезного станка по типу базового модели 16К20.
В пояснительной записке были рассмотрены следующие вопросы:
-приведены кинематические и проектировочные расчеты привода;
-определены геометрические размеры валов, зубчатых колес, подшипников и других деталей необходимых для разработки эскизной компоновки привода.
Задание
Таблица 1
|
Базовая модель станка
|
16К20 |
|
Вид регулирования
|
комбинированное |
|
Минимальное число оборотов шпинделя
|
|
|
Диапазон регулирования
|
150 |
|
Знаменатель геометрического ряда
|
|
|
Мощность резания
|
9 (кВт) |
 Содержание
Содержание
Стр.
Реферат…………………………………………………………………….................2
Задание…………………………………………………………………………….....3
Введение…………………………………………………………………………...…5
1 Кинематический расчет привода главного движения станка………………..…6
2 Силовой расчет привода главного движения…………………………………..12
2.1
Расчет зубчатых передач…….………………………………………………...13
2.2 Определение диаметров валов ……………………………………………....15
3 Оформление эскизного проекта………………………………………………....17
Заключение………………………………………………………………………....19
Список использованных источников……………………………………………..20
 Введение
Введение
Приводы главного движения современных металлорежущих станков могут быть с бесступенчатым, ступенчатым и комбинированным изменением частот вращения шпинделя. В настоящее время наибольшее распространение получили ступенчатые и комбинированные способы изменения частот вращения шпинделей.
Расчет привода состоит из двух основных этапов - кинематического и силового. На этапе кинематического расчёта определяются минимальные и максимальные частоты вращения шпинделя, диапазон частот вращения, геометрический ряд изменения частот вращения, знаменатель ряда, число скоростей (ступеней). Кроме этого, определяются: частота вращения ротора электродвигателя и его диапазон регулирования; передаточные отношения червячных передач. Также определяются виды передач от электродвигателя к входному валу коробки скоростей и при необходимости диаметры шкивов ременных передач.
Силовой расчет заключается в определении диаметров валов и модулей зубчатых и червячных колес, конструктивных размеров и форм других деталей привода с определением толщины стенок базовых деталей несущей системы станка.
1. Кинематический расчет привода главного движения станка

Приводы главного движения могут быть со ступенчатым, бесступенчатым и комбинированным изменением частот вращения шпинделя. Чаще всего используются приводы со ступенчатым и комбинированным изменением частот вращения.
Приводы со ступенчатым регулированием строятся на базе коробок скоростей с перемещающимися блоками зубчатых колес вдоль осей валов, в этих приводах обычно используются двойные и тройные блоки, образующие элементарные двухваловые коробки передач, имеющие простые множительные структуры.
В приводах главного движения со ступенчатым регулированием используются законы геометрической прогрессии для определения промежуточных значений частот вращения шпинделя.
По заданию минимальная частота вращения шпинделя равна:
![]()
Определяем максимальное число оборотов шпинделя по формуле:
![]()
Тогда
![]()
Так как
![]() ,
то
,
то
Максимальная
частота вращения электродвигателя:
![]()
Номинальная частота
вращения электродвигателя:
![]()
Определяем диапазон регулирования коробки скоростей:
![]()
Таким образом:
![]()
Определяем число групп передач коробки скоростей при условии, что диапазон регулирования каждой группы равен 8, по формуле:
![]()
Принимаем m=2, т.е. в коробке имеем 2 группы передач
Число скоростей коробки определяем по формуле:
![]()
Принимаем Z=4
При Z=4, m=2:
Диапазон регулирования групп равен:
![]()
![]()
 Определяем
величину С:
Определяем
величину С:
![]()
Где знаменатель
геометрического ряда![]()
Следовательно
![]()
Принимаем: С=6
Определяем фактический диапазон регулирования коробки скоростей и привода главного движения:
![]()
![]()
Где величина
![]() :
:
![]()
Принимаем:
![]()
Определяем число
![]() интервалов между максимальной частотой
вращения шпинделя и максимальной
частотой вращения электродвигателя, а
также число
интервалов между максимальной частотой
вращения шпинделя и максимальной
частотой вращения электродвигателя, а
также число![]() интервалов
между максимальной и минимальной
частотами вращения шпинделя по следующим
формулам:
интервалов
между максимальной и минимальной
частотами вращения шпинделя по следующим
формулам:
Принимаем:
![]()
![]()
Принимаем:
![]()
Общее число
интервалов
![]() равно:
равно:
![]()
Строим структурную
сетку привода. Количество горизонталей
равно
![]() .Количество
вертикалей равно количеству валов
коробки скоростей.
.Количество
вертикалей равно количеству валов
коробки скоростей.
Результатом построения графика частот вращения шпинделя является возможность определения передаточных отношений всех элементов, составляющих привод главного движения.
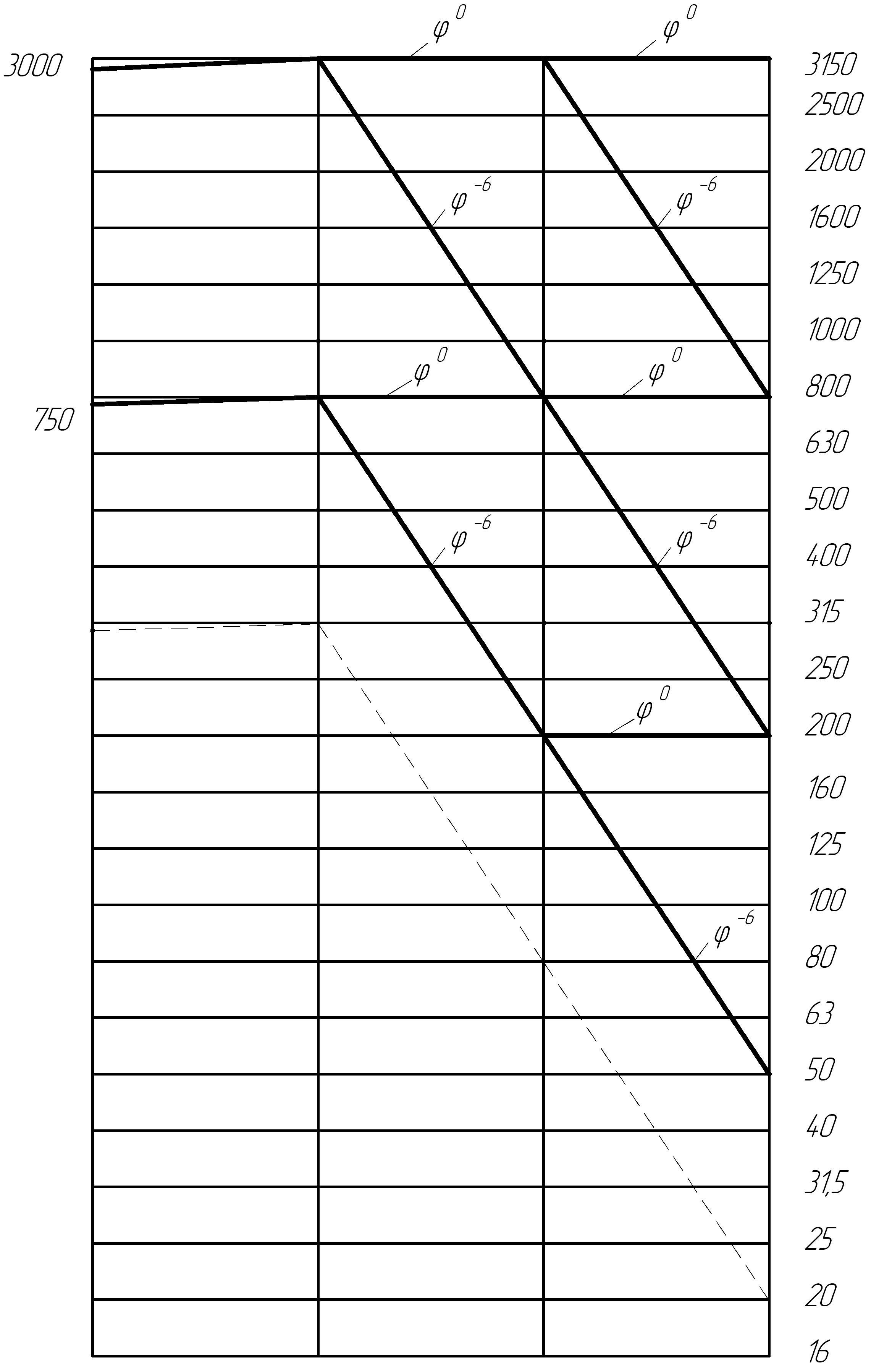

Рисунок 1 – График частот вращения шпинделя
 По
передаточным отношениям определяем
числа зубьев зубчатых колес.
По
передаточным отношениям определяем
числа зубьев зубчатых колес.
Суммы зубьев для групп передач определяются по нормали HII-I. По таблице 7[1],стр.40.
Таблица 1
|
i |
|
|
|
|
|
110 |
55 |
55 |
|
|
22 |
88 |
По графику частот можно построить ориентировочную схему коробки передач:

Рисунок 2 – Схема коробки передач