

Векторный способ задания движения точки
П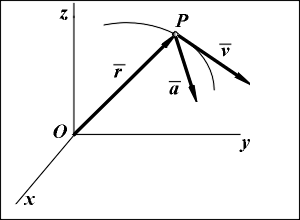 усть
точка Р движется в пространстве
относительно некоторой системы отсчета
Oxyz. Положение этой точки в любой момент
времени можно определить, задав ее
радиус-вектор r,
проведенный из начала координат в точку
Р.
усть
точка Р движется в пространстве
относительно некоторой системы отсчета
Oxyz. Положение этой точки в любой момент
времени можно определить, задав ее
радиус-вектор r,
проведенный из начала координат в точку
Р.
При движении точки Р вектор r будет изменяться с течением времени t, вообще говоря, и по модулю, и по направлению. Следовательно, r является переменным вектором (вектором-функцией), зависящим от аргумента t:
r = r(t).
Эта векторная функция определяет закон движения точки в векторной форме, так как она позволяет в любой момент времени построить вектор r и найти положение движущейся точки.
Геометрическое место концов векторов r(t), называемое также годографом вектора r, определяет траекторию движущейся точки.
Как известно, вектор может быть задан аналитически либо его модулем и углами с осями координат, либо его проекциями на эти оси.
![]()
Скоростью точки в данный момент времени называется вектор v, равный первой производной от ее радиуса-вектора r по времени:
v =
dr/dt
= ![]() ;
(Производную
по времени принято в механике обозначать
точкой над дифференцируемой величиной).
;
(Производную
по времени принято в механике обозначать
точкой над дифференцируемой величиной).
Вектор скорости, характеризующий изменение с течением времени модуля и направления радиуса-вектора точки, направлен по касательной к траектории точки в сторону ее движения.
При прямолинейном движении вектор скорости v все время направлен вдоль прямой, по которой движется точка, и может изменяться лишь по величине; при криволинейном движении кроме модуля все время изменяется и направление вектора скорости точки.
В качестве единиц измерения скорости применяют обычно м/с или км/ч.
![]()
Ускорением точки в данный момент времени называется вектор a, равный первой производной от вектора скорости v или второй производной от ее радиуса-вектора r по времени:
a =
dv/dt
= dr2/dt2 ;
или a = ![]() =
= ![]() .
.
Ускорение точки, как векторная величина, характеризует изменение с течением времени модуля и направления вектора скорости точки.
Рассмотрим, как располагается вектор a по отношению к траектории точки. При прямолинейном движении вектор a направлен вдоль прямой, по которой движется точка. Если траекторией является пространственная кривая, то вектор a направлен в сторону вогнутости траектории и лежит в соприкасающейся плоскости. Так называют плоскость, в которой происходит бесконечно малый поворот касательной к траектории при элементарном перемещении dr =vdt движущейся точки (подробнее это понятие изложено при задании движения точки естественным способом). Для пространственной кривой в каждой ее точке будет, вообще говоря, своя соприкасающаяся плоскость. Для плоской кривой соприкасающаяся плоскость совпадает с плоскостью этой кривой и является общей для всех ее точек.
В качестве единицы измерения ускорения применяется обычно м/с2.
Координатный способ задания движения точки
Р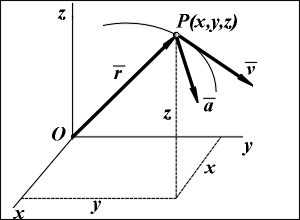 ассмотрим
движение в пространстве точки Р по
отношению к декартовой прямоугольной
системе координат Oxyz. Проекции rx,
ry,
rz ее
радиуса-вектора r равны
декартовым координатам точки: rx=
x, ry=
y, rz=
z (см. рис.). Следовательно, зависимость r(t)
будет известна, если будут заданы
координаты x, y, z как функции времени.
ассмотрим
движение в пространстве точки Р по
отношению к декартовой прямоугольной
системе координат Oxyz. Проекции rx,
ry,
rz ее
радиуса-вектора r равны
декартовым координатам точки: rx=
x, ry=
y, rz=
z (см. рис.). Следовательно, зависимость r(t)
будет известна, если будут заданы
координаты x, y, z как функции времени.
Чтобы знать закон движения точки, то есть ее положение в пространстве в любой момент времени, надо задать зависимость координат точки по времени:
x = x(t); y = y(t); z = z(t).
Эти зависимости представляют собой уравнения движения точки в прямоугольных декартовых координатах. Они определяют закон движения точки при координатном способе задания движения.
Движение точки можно задавать с использованием и других систем координат, например, вполярных координатах.
Если движение точки происходит все время в одной и той же плоскости, то, приняв эту плоскость за координатную плоскость Oxy, получим в этом случае два уравнения движения:
x = x(t); y = y(t).
При прямолинейном движении точки, если вдоль ее траектории направить ось Ox, движение будет определяться одним уравнением (законом прямолинейного движения точки):
x = x(t).
Естественный способ задания движения точки
Е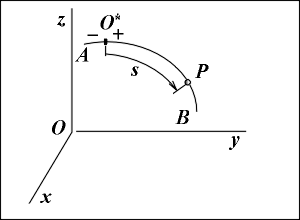 стественным
способом задания
движения точки удобно пользоваться в
тех случаях, когда траектория движущейся
точки заранее известна.
стественным
способом задания
движения точки удобно пользоваться в
тех случаях, когда траектория движущейся
точки заранее известна.
Пусть кривая АВ является траекторией точки Р при ее движении относительно системы отсчета Oxyz. Выберем на этой траектории какую-нибудь фиксированную точку O*, которую примем за начало отсчета, и установим на траектории положительное и отрицательное направления отсчета (как на координатной оси). Тогда положение точки Р на траектории будет однозначно определятьсякриволинейной (дуговой) координатой s, которая равна расстоянию от точки O* до точки Р, измеренному вдоль дуги траектории и взятому с соответствующим знаком.
При движении точка Р перемещается по траектории и, следовательно, координата s будет с течением времени изменяться. Чтобы знать положение точки Р на траектории в любой момент времени, надо знать зависимость
s = s(t).
Это уравнение и выражает закон движения точки вдоль траектории.
Таким образом, чтобы задать движение точки естественным способом, надо знать:
-
траекторию точки;
-
начало отсчета на траектории с указанием положительного и отрицательного направлений отсчета;
-
закон движения точки вдоль траектории в виде s =s(t).
Заметим, что координата s определяет положение движущейся точки, а не пройденный ею путь.
Например, пусть точка Р начинает движение из начала отсчета O* в положительном направлении, доходит до некоторого положения, останавливается и затем перемещается в обратном направлении. Тогда до остановки точки координата s и пройденный ею путь будут совпадать, а после остановки будут отличаться, так как координата s будет уменьшаться, а пройденный путь по-прежнему будет увеличиваться.