

КУРСОВЫЕ_ТАУ / РЕГУЛЯТОР_ВОЗБУЖДЕНИЯ_ГЕНЕРАТОРА
.docx
Система стабилизации напряжения генератора
Принцип работы системы поясняет рис. 20. Объект управления состоит из генератора (1) и возбудителя (2), роторы которых вращаются дизелем (ДВ). Напряжение на шинах генератора Uг зависит от напряжения U2 в обмотке возбуждения (ОВВ) возбудителя, тока Iн через сопротивление нагрузки Rн и частоты вращения ω роторов возбудителя и генератора.
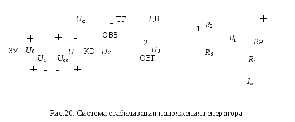
В системе используется принцип регулирования по отклонению (U0–Uoc) и по возмущающим воздействиям (ω, Iн). Частота вращения ω измеряется тахогенератором (ТГ). Резистор R1 введен для измерения тока нагрузки, делитель R2 – R3 –для измерения напряжения генератора. Сигналы U0, Ui, Uос, Uω представляют, в определенном масштабе, значения заданного задающим устройством (ЗУ) напряжения генератора, тока нагрузки, напряжения на шинах генератора, скорости вращения дизеля соответственно. Источники этих сигналов соединены последовательно, результат их суммирования – напряжение U1, подаваемое через корректирующий элемент (КЭ) на обмотку ОВВ. В номинальном статическом режиме работы генератора, т.е. при постоянных номинальных значениях U0, Iн, ω, на обмотки возбуждения возбудителя и генератора подаются номинальные значения напряжений U2 и U3, при этом напряжение генератора Uг равно заданному значению. Если увеличить задающее воздействие U0, увеличится напряжение U1 и, соответственно, напряжение генератора Uг. Если увеличится ток нагрузки Iн, то уменьшатся напряжение генератора Uг и сигнал обратной связи по напряжению Uос, но увеличится сигнал Ui коррекции напряжения генератора по току нагрузки. При правильном выборе параметров системы влияние тока нагрузки на напряжение генератора в статическом режиме будет полностью скомпенсировано.
Влияние изменения скорости вращения дизеля на напряжение генератора компенсируется (в статическом режиме) введением сигнала Uω с тахогенератора в цепь формирования напряжения U1.
Уравнения динамики элементов системы
Приведенные ниже уравнения записаны относительно отклонений переменных от их значений, соответствующих номинальному режиму работы.
|
Генератор:
|
 .
.
|
Возбудитель:
|
 .
.
Корректирующий элемент:
|
|

Корректирующий элемент реализует пропорционально-дифференциальный закон управления, kд и kп – коэффициенты при дифференциальной и пропорциональной составляющих управляющего воздействия U2.
Цепь обратной связи по напряжению: Uoc = koc Ur.
Цепь коррекции напряжения генератора по току нагрузки: Ui = ki Iн.
Цепь коррекции напряжения генератора по скорости вращения дизеля: Uω=kωω.
Пример составления передаточных функций
в системе с управлением по отклонению и возмущению
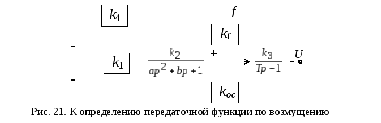
Передаточная функция системы (рис. 21), устанавливающая зависимость регулируемой переменной (U) от возмущающего воздействия (f), составляется по правилам, указанным во введении.
«Прямая» цепь от входа до выхода помечена на рис. 21 пунктирными стрелками. Передаточная функция «прямой» цепи
В
статике (р =
0)

Передаточная функция «разомкнутой» системы – произведение передаточных функций всех элементов, образующих контур управления:
В
статике (р
= 0)

Статическая характеристика

Характеристическое уравнение «замкнутой» системы получаем, приравняв к нулю сумму числителя и знаменателя передаточной функции «разомкнутой» системы:

Т а б л и ц а 5. Параметры системы стабилизации напряжения генератора
|
параметры |
номера вариантов заданий |
|||||||||
|
75-77 |
78-80 |
81- 83 |
84- 86 |
87-89 |
90, 91 |
92, 93 |
94, 95 |
96, 97 |
98, 99 |
|
|
Т1 |
0.2 |
0.2 |
0.2 |
0.4 |
0.5 |
0.5 |
0.5 |
1 |
2 |
2 |
|
Т2 |
0.1 |
0.1 |
0.2 |
0.2 |
0.2 |
0.2 |
0.1 |
0.3 |
0.5 |
0.3 |
|
Т3 2 |
0.01 |
0.02 |
0.04 |
0.08 |
0.03 |
0.06 |
0.015 |
0.09 |
0.65 |
0.06 |
|
k1 |
2 |
3 |
4 |
5 |
2 |
3 |
3 |
4 |
5 |
2 |
|
k2 |
1 |
2 |
1 |
2 |
1 |
2 |
2 |
4 |
5 |
2 |
|
kf1 |
1 |
1.5 |
0.8 |
2 |
1.2 |
1 |
1.5 |
0.6 |
1 |
1 |
|
kf2 |
0.1 |
0.2 |
0.3 |
0.1 |
0.15 |
0.25 |
0.1 |
0.2 |
0.1 |
0.1 |
Задания
1. Представьте схему системы (рис. 20) и отметьте на ней объект управления, измерительные элементы, регулируемую величину, задающее, управляющее и возмущающие воздействия.
Запишите передаточные функции всех элементов и составьте структурную схему системы.
2. Приведите статические и переходные характеристики звеньев, описывающих возбудитель и генератор, с учетом конкретных значений параметров Вашего варианта. Если звено колебательное, укажите значения параметра затухания, перерегулирования и периода собственных колебаний.
3. Получите аналитические выражения статических характеристик Uг(U0), Uг(Iн) и Uг(ω). Определите параметры koc, ki, kω как функции параметра kп, при которых нет статической ошибки, т.е. Uг=U0 независимо от значений ω и Iн. В связи с тем, что в системе стабилизации задающее воздействие постоянно и его можно подобрать так, чтобы регулируемая величина, в отсутствие возмущений, была равна номинальному значению при любом значении koc, при выполнении последующих заданий считайте, что koc= 1.
4. Запишите характеристическое уравнение системы и условие устойчивости по критерию Гурвица. В плоскости параметров kд (абсцисса) и kп (ордината) постройте границу области устойчивости для Вашего варианта системы.
5. Проведите исследование системы на математической модели в следующем объеме:
а) проверьте правильность построения границы области устойчивости. Представьте переходную характеристику Uг(t) при параметрах kд, kп, соответствующих одной из точек (любой) на границе устойчивости,
б) в области устойчивости укажите область параметров kд, kп, обеспечивающих удовлетворительное качество регулирования, и численные значения показателей качества. Представьте переходную характеристику Uг(t) при оптимальных, по Вашему мнению, параметрах,
в) подтвердите правильность расчета параметров ki, kω осциллограммами переходного процесса Uг(t) при ступенчатых изменениях тока нагрузки и скорости вращения дизеля для двух случаев: с управлением только по отклонению и с управлением по отклонению и по возмущающим воздействиям Iн, ω.