

47+77 тау / тау кр2 47
.pdf2
Содержание
Содержание……………………………………………………………………………………….2
1.Контрольная работа №2…………………………………………………………………….3
1.1.Задание 1…………………………………………………………………………………..3
1.2.Задание 2………………………………………………………………………………...10
Список использованных источников……………………………………………………..17
3
1. Контрольная работа №2
1.1. Задание 1
Задание:
В процессе выполнения задания 1 необходимо:
–построить структурную схему модели автоматического регулятор скорости движущегося объекта с использованием типовых звеньев САУ;
–вычислить параметры используемых типовых звеньев;
– осуществить |
исследование |
функционирования |
автоматическо |
|
регулятора |
скорости |
при воздействии заданных возмущающих факторо, |
||
используя для моделирования программный продукт МВТУ(Моделирование В |
||||
Технических |
Устройствах) или пакет |
программ«Simulink» математической |
||
среды «Matlab system». |
|
|
|
|
Для выполнения задания 1 необходимо использовать следующие исходные данные:
1)Vн=35 – значение скорости движения объекта на момент начал регулирования, км/ч;
2)Vз=55 – значение заданной скорости движения объекта, км/ч;
3)K1=0,008 – статический коэффициент усиления апериодического звена в основной цепи регулятора, характеризующий взаимосвязь между текущим
значением отклонения V фактической скорости Vф от заданнойVз и
величиной изменения Vр регулируемой скорости в установившемся режиме;
4)T1=0,10 – постоянная времени апериодического звена в основной цепи регулятора, характеризующая инерционность реализации управляющег воздействия, с;
5)T2=0,40 – постоянная времени апериодического звена в цепи обратной связи, характеризующая инерционность цепи обратной связи устройств автоматического регулирования, с;
6)A=3,0 – максимальное приращение Vв фактической скоростиVф от периодически изменяющегося внешнего возмущающего воздействия, км/ч.
4
Закон изменения фактической скорости Vф(t) движения объекта имеет вид
следующей функции:
Vф (t) = Vн + Vв (t) + Vр (t) , |
(1.1) |
где Vв(t) – изменение фактической скорости, вызванное периодически изменяющимся внешним возмущающим воздействием с амплитудойA, км/ч;
Vр(t) – изменение фактической скорости, вызванное регулирующим воздействием апериодического звена в основной цепи регулятора.
Используя приведенные структурные схемы модели автоматическог регулятора скорости с использованием программных средств Simulink и МВТУ,
студент должен:
–вычислить статический коэффициент усиления К2 цепи обратной связи;
–найти аналитическое выражение для передаточной функцииW(p)
замкнутой системы автоматического регулирования скорости (далее системы); |
|
|||||||
– используя программные средства Simulink или МВТУ, получить графики |
|
|||||||
переходной |
функции |
замкнутой |
системыh(t) |
и |
сделать |
выводы |
о |
|
устойчивости системы; |
|
|
|
|
|
|
||
– используя программные средства Simulink или МВТУ, получить графики |
|
|||||||
логарифмической |
амплитудночастотной L(lgω) |
и |
фазочастной (lgωφ) |
|
||||
характеристик замкнутой системы, и подтвердить сделанные ранее выводы об устойчивости замкнутой системы;
– произвести оценку основных показателей качества регулировани
скорости при изменении постоянной времени Т апериодического звена в цепи
2
обратной связи автоматического регулятора скорости в следующих пределах: T2.min=0,1·T2; T2.max=5,0·T2;
–вывести на печать графики h(t), Hp(ω) и φp(ω);
–привести краткое пояснение хода выполнения работы и сформулировать выводы по результатам исследований.
|
|
|
|
5 |
Решение: |
|
|
|
|
Составим |
математическую |
модель |
регулятора |
скорост |
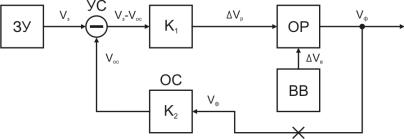
установившегося режима, используя структуру регулятора, представленную на
рисунке 1.1, для чего разорвем условно цепь обратной связи(на рисунке отмечено крестиком). Тогда для скорости на выходе блока ОР б справедливо по определению уравнение (1.1).
Рис. 1.1 – Структурная схема САР скорости для установившегося режима
Из схемы на рисунке 1.1 следует, что сигнал на входе блока ОР равен:
Vр |
= K1 ×(Vз - Vос ) , где Vос = K2 × Vф |
(1.2) |
Подставляя выражение для Vос в формулу для |
Vр, получим: |
|
Vр |
= K1 × (Vз - K2 × Vф ) . |
(1.3) |
В результате выражение для Vф примет окончательный вид:
Vф = Vн + Vв + K1 ×(Vз - K2 × Vф ) . |
(1.4) |
Последнее уравнение является математической моделью рассмотренного выше регулятора скорости и позволяет определить неизвестный параметрK2.
После несложного преобразования данное уравнение можно привести следующему виду:
|
|
|
|
|
6 |
V = |
K1 × Vз + Vн + Vв |
. |
(1.5) |
||
|
|||||
ф |
1 |
+ K1 |
× K2 |
|
|
|
|
||||
Решим полученное уравнение относительно переменнойK2, учитывая что в установившемся режиме, исходя из назначения самого регулятора, должно выполняться равенство: Vф=Vз, т.е.:
|
K1 × Vз + Vн + |
Vв |
|
|
|
|
Vн + |
Vв |
-1 |
|
|||
V = |
|
|
|
|
= Vз |
|
|
||||||
, откуда K |
2 |
=1 |
+ |
|
-37,64 . |
(1.6) |
|||||||
|
|
||||||||||||
з |
1 |
+ K1 |
× K2 |
|
|
|
|
K1 |
|
||||
|
|
|
|
|
|
|
|||||||
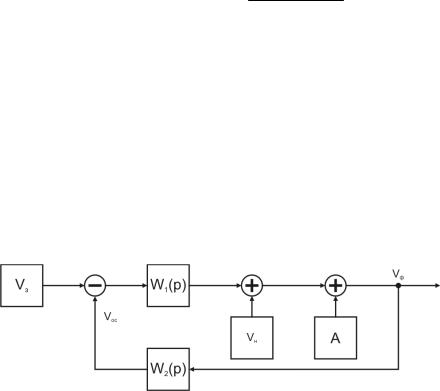
Так как состав и параметры типовых звеньев модели автоматическог регулятора скорости нами определены полностью, в том числе входные и выходные сигналы каждого звена, то можно приступить к построению структурной схемы модели САР, определению вида ее передаточной функции и последующему исследованию в соответствии с требованиями задания 1.
Рис. 1.2 – Структурная схема модели автоматического регулятора скорости в общем виде
Составим для структурной модели замкнутой САР аналитич
выражение для ее передаточной функцииW(p), для чего составим уравнение для фактической скорости на выходе системы:
Vф = (Vз - Vос ) × W1(p) + Vн + A . |
(1.7) |
Учитывая, что Vос = Vф × W2 (p) уравнение после подстановки примет вид:
|
7 |
Vф = (Vз - Vф × W2 (p)) × W1(p) + Vн + A . |
(1.8) |
Преобразуем полученное выражение к виду:
Vф ×(1 + W2 (p) × W1(p))= Vз × W1(p) + Vн + A , откуда |
(1.9) |
||||||||||||||||
V = |
Vз × W1 (p) + Vн + A |
. |
|
|
|
(1.10) |
|||||||||||
|
|
|
|
|
|
|
|
|
|||||||||
ф |
1 |
+ W2 (p) × W1 |
(p) |
|
|
||||||||||||
|
|
|
|||||||||||||||
Передаточная |
функция W(p) есть отношение выходной |
величиныVф к |
|||||||||||||||
входной Vз: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
V = |
Vз × W1 (p) + Vн + A |
, |
|
|
|
(1.11) |
|||||||||||
|
|
|
|
|
|
|
|
|
|||||||||
ф |
1 |
+ W2 (p) × W1 |
(p) |
|
|
||||||||||||
|
|
|
|||||||||||||||
или после подстановки получим окончательно: |
|
||||||||||||||||
|
|
|
|
|
K1 |
|
+ |
Vн + A |
|
|
|
|
|||||
|
|
|
|
T × p |
|
|
V |
|
|
||||||||
W(p) = |
|
|
+1 |
|
|
|
. |
(1.12) |
|||||||||
|
1 |
|
|
|
|
|
з |
||||||||||
1 + |
K2 |
× |
K1 |
||||||||||||||
|
|
|
|
||||||||||||||
|
|
T × p +1 |
|
T × p +1 |
|
|
|
||||||||||
|
|
2 |
|
|
|
1 |
|
|
|
|
|
||||||
Программа на языке Matlab:
clc; clear all;
Vn=35; Vz=55; K1=0.008; T1=0.10; T2=0.40; A=3.0; Tv=4.0*pi;
K2=1+((((Vn+A)/(Vz))-1)/(K1)); disp('Значение K2='); disp(K2);
sys1=tf([K1],[T1 1]); sys2=tf([K2],[T2 1]);
sys3=(sys1+((Vn+A)/(Vz)))/(1+sys1*sys2);
figure |
(1); |
step(sys3); |
hold |
off; |
grid |
on; |
figure |
(2); |
bode(sys3); |
hold |
off; |
grid |
on; |
figure (3); nyquist(sys3); hold off; grid on;

8
Рис. 1.3 – Переходная характеристика автоматического регулятора скорости
Из анализа приведенных графиков можно сделать следующие выводы:
1)система устойчива, так как переходной процесс имеет монотонный затухающий характер. Выходная величина стремится к единице и достигает значения 0,95 за время, равное 1,22с, что характеризует длительность переходного процесса;
2)фазовый угол находится в отрицательной области и имеет минимум на круговой частоте 1,90 рад/с, равный -11,9град.
Рис. 1.4 – ЛАЧХ и ЛФЧХ автоматического регулятора скорости
9
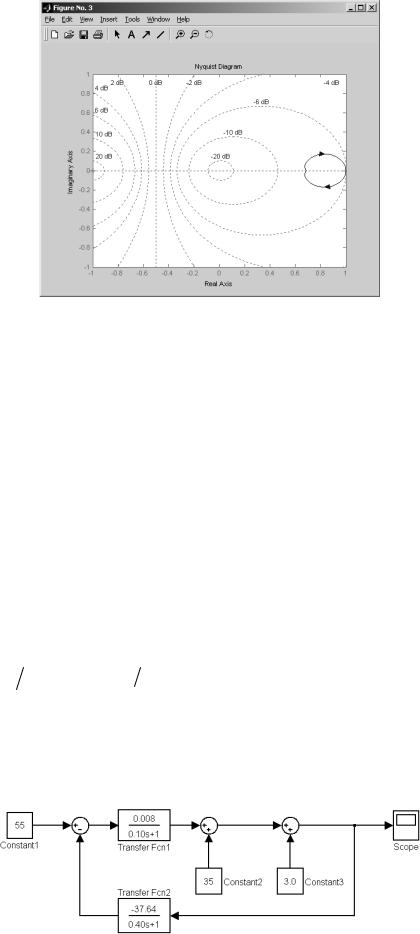
Рис. 1.5 – Годограф Найквиста автоматического регулятора скорости
Целью работы САР скорости локомотива является обеспечение фактической скорости движения равной заданной. К количественным критериям оценки качества регулирования САР относятся:
– максимальное абсолютное отклонение регулируемой скорости:
Vф = Vф - Vз = 55 - 55 = 0 км/ч; |
(1.13) |
– максимальное относительное отклонение регулируемой скорости:
δVф = ( Vф Vз ) ×100% = (0 55) ×100% = 0% ; |
(1.14) |
– время регулирования скорости: tр=4,0с.
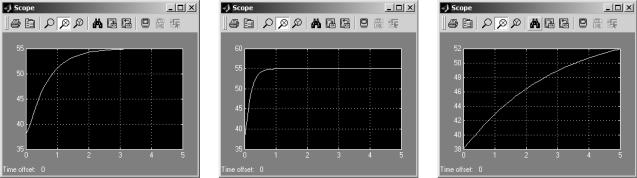
Рис. 1.6 – Структурная схема модели автоматического регулятора скорости в Simulink
10
а) |
б) |
в) |
Рис. 1.7 – График зависимости скорости движения локомотива от скорости: |
||
а) фактической; б) при T2.min=0,1·T2=0,040; в) при T2.max=5,0·T2=2,00 |
||
Вывод: |
|
|
При увеличении |
численного значения |
параметраT2 автоматического |
регулятора скорости, увеличивается время регулирования, а при уменьшении
соответственно |
уменьшается. На |
рисунке 1.7 представлены |
результаты |
требуемого эксперимента при разных значениях постоянной времени. |
|
||
1.2. Задание 2 |
|
|
|
|
Задание: |
|
|
|
|
В процессе выполнения задания 2 необходимо: |
|
|
||
– откорректировать |
структурную |
схему |
модели |
автоматическ |
регулятора скорости движущегося объекта с учетом переменного характера внешнего возмущающего воздействия;
– задать параметры используемых типовых звеньев; |
|
||
– осуществить |
исследование |
функционирования |
автоматическо |
регулятора скорости при воздействии заданных возмущающих факторов.
Для выполнения задания2 необходимо дополнительно использовать следующие исходные данные:
1) A=3,0 – амплитуда периодически изменяющегося по синусоидальному закону внешнего возмущающего воздействия:

|
11 |
Vв = A ×sin(2πt Tв ) , км/ч; |
(1.15) |
2) Tв=4π – период изменения внешнего возмущающего воздействия, с.
Решение: |
|
|
|
|
|
|
Для |
того |
чтобы |
система |
автоматического |
управления |
выпо |
качественно свои функции в условиях переменного внешнего возмущающего воздействия, она должна обладать свойствами САУ с комбинированны управлением, как по отклонению, так и по возмущению. Для построения модели САУ с комбинированным управлением статический коэффицие
усиления |
|
цепи |
обратной |
связи |
должен |
автоматически |
и |
|||||
(подстраиваться |
под |
изменяющиеся условия |
функционирования ) САУв |
|
||||||||
соответствии с выражением: |
|
|
|
|
|
|||||||
|
|
Vн + |
Vв |
-1 |
|
Vн + A ×sin(2πt Tв ) |
-1 |
|
|
|
||
|
|
|
|
|
|
|
|
|||||
K2 =1 + |
= |
Vз |
1 + |
= |
Vз |
|
-41,18 . |
(1.16) |
|
|||
|
K1 |
K1 |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|||
Следовательно, модель САУ должна содержать расчетный узел автоматическому вычислению текущего значения коэффициента2.
Соответственно, модель цепи обратной связи в структурной схеме модели САУ на рисунке 1.2 должна видоизмениться, а именно:
–иметь расчетный узел по вычислению коэффициента К2;
–иметь формирователь выходного сигналаVoc цепи обратной связи,
состоящий из множителя, реализующего следующую функцию перемножения:
Vос = K2 × Vф × |
1 |
. |
(1.17) |
T × p +1 |
|||
|
2 |
|
|
Модель расчетного узла по автоматическому вычислению коэффициента К2 может иметь следующий вид, представленный на рисунке 1.8: