

47+77 тау / тау кр1 77
.pdf2
Содержание
Содержание……………………………………………………………………………………….2
1.Контрольная работа №1…………………………………………………………………….3
1.1.Задача 1……………………………………………………………………………………3
1.2.Задача 2……………………………………………………………………………………8
1.3.Задача 3…………………………………………………………………………………..11
Список использованных источников……………………………………………………..20

3
1. Контрольная работа №1
1.1. Задача 1
Задание:
Определить весовую функцию g(t) и переходную функцию h(t) линейной САУ, состоящей из последовательного соединения апериодического идеального интегрирующего звеньев, по заданным параметрам ее передаточной функции:
|
|
K |
|
|
|
|
|
W(p) = |
|
, где K=2,0; T=0,7с. |
|
(1.1) |
|
||
p ×(T× p +1) |
|
|
|||||
Составить |
таблицу |
расчетных |
значений |
искомых |
в |
||
характеристик и построить их графики для временного интервала: t=0–5T с |
|
||||||
шагом дискретизации, равным |
0,5Т. Масштаб |
по оси |
ординат студентом |
||||
выбирается самостоятельно, исходя из того, что высота графика должна быть |
|
||||||
не менее 8–10см. |
|
|
|
|
|
|
|
Решение:
Известно, что изображение весовой функции L[g(t)] любой линейной САУ есть ни что иное, как ее передаточная функция:
2,0 |
|
L[g(t)]=W(p) = p ×(0,7 × p +1) . |
(1.2) |
Для отыскания оригинала весовой функцииg(t)=L-1[W(p)] разложим W(p)
на элементарные дроби, соответствующие передаточным функциям отдельных
звеньев |
системы |
САУ, и |
воспользуемся |
методом |
неопределенн |
|
коэффициентов |
для определения неизвестных статических коэффициентов |
|||||
усиления этих |
звеньев(коэффициенты А и В в знаменателе элементарных |
|||||
дробей): |
|
|
|
|
|
|
|
|
|
|
|
|
4 |
W(p) = |
= 2,0 |
A |
+ |
B |
. |
(1.3) |
|
(0,7 × p +1) |
|||||
|
p ×(0, 7 × p +1) |
p |
|
|
||
После приведения правой части выражения(1.3) к общему знаменателю можно приравнять числители левой и правой частей полученного уравнения:
A ×(0, 7 × p +1) + B × p p=× (0,7 ×A + B) + A 2,= 0 . |
(1.4) |
Приравнивая коэффициенты левой и правой частей уравнения(1.3) при одинаковых степенях р, получим систему двух уравнений из двух неизвестных:
ì |
A = 2,0 |
, откуда А=2,0; В=-0,7·А=-1,4. |
(1.5) |
í |
× A + B |
||
î0,7 |
= 0 |
|
|
Подставляя |
вычисленные значения коэффициентов А и |
В в уравнени |
|
(1.3), получим:
W(p) = |
2,0 |
= |
|
p ×(0,7 |
|
||
|
× p +1) |
||
æ |
1 |
|
=0,7 |
ö |
|
= 2,0 ×ç |
- |
÷ |
|||
|
|||||
è p |
|
(0,7 × p +1) |
ø |
||
2,0 |
- |
1,4 |
= |
|
(0,7 × p +1) |
||
p |
|
||
æ |
1 |
|
1,0 |
ö |
|
|
2,0 ×ç |
- |
÷. |
(1.6) |
|||
|
(p + (1 0,7)) |
|||||
è p |
|
ø |
|
|||
Переход от изображений элементарных функций f(p) в операторной форме записи к их оригиналам, как функций времениf(t), осуществляется, как правило, с использованием стандартных таблиц изображений, приводимых в справочной литературе. Заменив в правой части уравнения(1.6) изображения элементарных функций на их оригиналы, получим искомое выражение для весовой функции:
g(t) = 2,0 ×(1 - e-(1 0,7 )×t ) . |
(1.7) |
5
Задаваясь различными значениямиt, заполним таблицу расчетных
значений и построим график g(t).
Таблица 1.1
Расчетные значения искомых временных характеристик g(t)
Значения t, с |
Значения g(t) |
0.00 |
0.0000 |
0.35 |
0.7869 |
0.70 |
1.2642 |
1.05 |
1.5537 |
1.40 |
1.7293 |
1.75 |
1.8358 |
2.10 |
1.9004 |
2.45 |
1.9396 |
2.80 |
1.9634 |
3.15 |
1.9778 |
3.50 |
1.9865 |
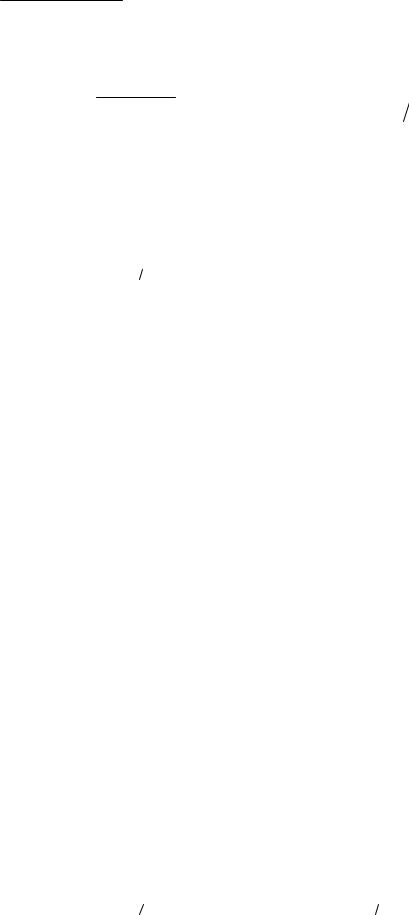
Рис. 1.1 – График функции g(t)
По известной весовой функцииg(t) можно найти переходную функцию
h(t), принимая во внимание, что:
h(t) = òg(t) ×dt . |
(1.8) |

6
Изображение L[h(t)] функции h(t) можно получить путем умножения передаточной функции W(p) исходной САУ на передаточную функцию1/р
идеального интегрирующего ,звеначто соответствует включени последовательно с САУ интегрирующего звена:
L[h(t)]=W(p) × |
1 |
= |
2,0 |
. |
(1.9) |
|
p |
p × p ×(0,7 × p +1) |
|||||
|
|
|
|
Разложим правую часть уравнения(1.9) на элементарные дроби с тем,
чтобы получить более простые изображения функций для нахождения оригиналов:
W(p) = |
= 2,0 |
A |
+ |
B |
+ |
C |
. |
(1.10) |
|
|
(0,7 × p +1) |
||||||
|
p × p ×(0,7 × p +1) |
p |
p × p |
|
|
|||
После приведения правой части выражения(1.10) к общему знаменателю приравняем числители левой и правой частей полученного уравнения:
A × p ×(0,7 × p +1) + B ×(0,7 × p +1) + C × p × p = 2,0 . |
(1.11) |
Приравнивая коэффициенты левой и правой частей уравнения(1.11) при одинаковых степенях р, получим систему трех уравнений из трех неизвестных:
ìB = 2,0
ï |
× B + A = 0 , откуда B=2,0; A=-0,7·B=-1,4; С=-0,7·A=0,98. |
(1.12) |
í0, 7 |
||
ï |
× A + C = 0 |
|
î0, 7 |
|
Подставляя вычисленные значения коэффициентов А, В и С в уравнение
(1.10), получим:
7
W(p) = |
2,0 = |
- |
1, 4 |
+ |
2, 0 |
+ |
0,98 |
= |
|
|
(0, 7 × p +1) |
||||||
|
p × p ×(0, 7 × p +1) |
|
p p × p |
|
||||
æ |
|
0,7 |
|
1 |
0,49 |
ö |
æ |
1 |
æ |
1 |
|
1 |
öö |
|
= 2,0×ç |
- |
|
+ |
|
+ |
= |
÷ |
2,0×ç |
|
- 0,7 ×ç |
|
- |
|
÷÷. (1.13) |
p |
p ×p |
|
|
(p + (1 0,7)) |
||||||||||
è |
|
|
|
(0,7 ×p +1) |
ø |
è p ×p |
è p |
|
øø |
|||||
Заменив в правой части уравнения(1.13) изображения элементарных функций на их оригиналы, получим выражение для переходной функции:
h(t) = 2,0 ×(t - 0,7 × (1 - e-(1 0,7 )×t )) . |
(1.14) |
Задаваясь различными значениямиt, заполним |
таблицу расчетных |
значений и построим график h(t). |
|
Таблица 1.2
Расчетные значения искомых временных характеристик h(t)
Значения t, с |
Значения h(t) |
0.00 |
0.0000 |
0.35 |
0.1491 |
0.70 |
0.5150 |
1.05 |
1.0124 |
1.40 |
1.5895 |
1.75 |
2.2149 |
2.10 |
2.8697 |
2.45 |
3.5423 |
2.80 |
4.2256 |
3.15 |
4.9156 |
3.50 |
5.6094 |
Этот результат можно получить путем непосредственного интегрирования
весовой функции:
t |
t |
|
h(t) = òg(x) ×dx = ò(1 - e-(1 0,7)×t ) ×dx = 2, 0 ×(t - 0,7 ×(1 - e-(1 0,7)×t )) . |
(1.15) |
|
0 |
0 |
|
8
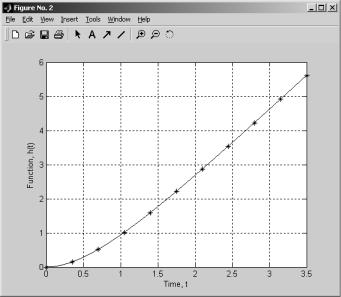
Рис. 1.2 – График функции h(t)
1.2. Задача 2
Задание:
Определить круговую частоту ω, с которой устройство САУ, состоящее из последовательно включенных двух апериодических и одного идеально интегрирующего звеньев, дает заданный сдвиг по фазе между выходным и входным сигналами. При этом следует определить амплитуду выходного сигнала Ym на данной частоте, если известна амплитуда входного сигналаXm.
Передаточная функция заданной САУ имеет следующий вид:
W(p) = |
|
K |
, где K=4,0; T1=0,4с; T2=0,04с. |
(1.16) |
p ×(T × p +1) ×(T × p +1) |
||||
|
1 |
2 |
|
|
Xm=5; φ=-140град.
Решение:
По передаточной функцииW(p), представленной в операторной форме,
найдем выражение для частотной передаточной функции W(jω) путем замены в выражении (1.16) оператора Лапласа р на комплексную переменную jω:

|
|
|
|
|
|
|
|
|
|
9 |
W( jω) = |
|
= |
K |
|
H(ω) ×ejφ(ω) , |
(1.17) |
||||
|
|
|
|
|||||||
|
|
jω ×(T1× jω +1) ×(T2 × jω +1) |
|
|||||||
H(ω) = |
|
|
|
K |
|
|
|
, |
(1.18) |
|
ω ×( |
|
|
)×( |
|
|
) |
||||
1 + (T1×ω)2 |
1 + (T2 ×ω)2 |
|||||||||
φ(ω) = -90° - arctg(T1× ω) - arctg(T2 × ω) , |
(1.19) |
где: Н(ω) – модуль частотной передаточной функции, представляющий собой амплитудно-частотную характеристику(АЧХ) системы САУ; φ(ω) –
аргумент частотной передаточной функции, представляющий собой фазочастотную характеристику (ФЧХ) системы САУ.
Задаваясь значениями круговой частоты ω с шагом1 – 2 рад/с определим
значения функции φ(ω), занесем их в таблицу расчетных значений и построим график ФЧХ, на котором проведем горизонтальную прямую через точку,
соответствующую заданному углу сдвига фаз φ, до пересечения с кривой ФЧХ.
Через найденную точку пересечения проведем вертикальную прямую
пересечения с осью частот, на которой отметим искомую круговую частоту ω,
и
которая дает заданный сдвиг фазы φ(ω)=φ. Подставляя найденное значение
и
круговой частоты ω в выражение для модуля Н)(ωчастотной передаточной
и
функции вычислим его значение Н(ωи).
Таблица 1.3
Расчетные значения ФЧХ системы автоматического управления
Значения ω, рад/с |
Значения φ(ω), град |
0.0000 |
-90.00000 |
5.0000 |
-164.7449 |
10.000 |
-187.7652 |
15.000 |
-201.5014 |
20.000 |
-211.5348 |
25.000 |
-219.2894 |
10
30.000 |
-225.4308 |
35.000 |
-230.3767 |
40.000 |
-234.4183 |
45.000 |
-237.7656 |
50.000 |
-240.5725 |
55.000 |
-242.9535 |
60.000 |
-244.9942 |
65.000 |
-246.7599 |
70.000 |
-248.3008 |
75.000 |
-249.6559 |
80.000 |
-250.8561 |
85.000 |
-251.9258 |
90.000 |
-252.8847 |
95.000 |
-253.7490 |
100.00 |
-254.5317 |
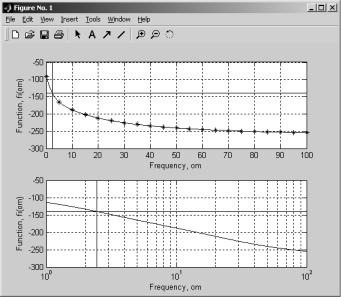
Рис. 1.3 – ФЧХ системы автоматического управления
Круговая частота ωи=2,44рад/с при φ(ωи)=φ=-140град, а Н(ωи)=1167,6·10-3
при той же круговой частоте. Затем определяем искомую амплитуду выходного сигнала, как:
Ym = H(ωи ) × Xm = 5,8382 , |
(1.20) |
Ym.дБ = 20 × log(Ym ) =15,3255 дБ. |
(1.21) |

11
1.3. Задача 3
Задание:
1. Построить асимптотическую логарифмическую амплитудно-частотную характеристику (ЛАЧХ) и логарифмическую фазочастотную характеристику
(ЛФЧХ) для линейной системы САУ, состоящей из четырех последовательно включенных звеньев.
Одного реального дифференцирующего звена с передаточной функцией:
W(p) = K1 × (T1× p +1) . |
|
|
|
|
|
(1.22) |
||
Двух |
апериодических |
звеньев |
первого |
порядка |
с |
передаточ |
||
функциями: |
|
|
|
|
|
|
|
|
W2 (p) = |
K2 |
и W3 |
(p) = |
K3 |
. |
|
|
(1.23) |
(T2 × p +1) |
(T3 × p +1) |
|
|
|||||
|
|
|
|
|
|
|
||
Одного идеального интегрирующего звена с передаточной функцией:
W4 (p) = K4 p . |
(1.24) |
По условиям задачи передаточная функция заданной линейной САУ имеет следующий вид:
W(p) = W1 (p) × W2 (p) × W3 (p) × W4 |
(p) = |
K×(T1× p +1) |
, |
(1.25) |
|||
p ×(T2 |
× p +1) |
×(T3× p +1) |
|||||
|
|
|
|
||||
где К=К1· К2·К3· К4=1,0; T1=0,80с; T2=5,00с; T3=0,20с.
2. Построить годограф АФЧХ W(jω) заданной САУ.