

2.1.3.4. Построение систем оповещения о приближении поездов к переездам и бригад работающих на путях
Для решения данной задачи необходимо организовать канал радиосвязи поезд - устройство АПС. Системы автоматической переездной сигнализации получают информацию о дислокации подвижной единицы в момент достижения зоны оповещения. Зона оповещения определяется из расчёта длины поезда, длины тормозного пути, максимальной скорости движения, требуемого времени на освобождение автотранспортом переезда. Переезд оборудуется сигналами прикрытия. При получении извещения сигналы прикрытия автоматически открываются, а после проследования поезда закрываются. Целесообразно предусмотреть передачу информации о разрешении проследования переезда самостоятельной подвижной единицей после срабатывания АПС. Благодаря оснащению переезда сигналами прикрытия начало зоны оповещения можно варьировать в зависимости от реальной скорости движения самостоятельно подвижной единицей. За счёт изменения координат начала зоны прикрытия, увеличивается пропускная способность переезда.
Бригада, работающая на пути, оснащается АП СРНС ГЛОНАСС/GPS и радиостанцией, работающей в выделенной полосе частот. В ЭВМ локомотива вычисляются приращения координат между бригадами, работающими на пути с учётом номера пути, по которому осуществляется движение и локомотивом. При достижении минимального приращения между участниками движения и бригад, работающих на пути, (установленного для данного участка пути при определённой скорости проследования и видов работ) на локомотиве происходит оповещение. Та же схема реализуется и в аппаратуре бригад, работающих на путях.
2.1.3.5 Определение расстояний между локомотивами (системы интервального регулирования)
Локомотив постоянно ретранслирует в выделенной полосе частот собственные координаты, информацию о длине состава и принимает данную информацию от других локомотивов.
В ЭВМ локомотива вычисляются приращения координат между участниками движения с учётом номера пути, по которому осуществляется движение.
2.1.3.6 Построение системы единого времени для устройств жат и связи с погрешностью не более 10" с
Навигационные приёмники СРНС ГЛОНАСС/GPS вырабатывают сигналы точного всемирного координированного времени (UTC) (атомный стандарт частоты) с погрешностью не более 10"6 с. Что можно использовать при синхронизации работы различных устройств ЖАТ и связи.
Данная концепция дает однозначный ответ на возможность применения спутниковой системы, в том числе ,
Решение эффективности способом реализации возможность использования уже существующих навигационных систем
Алгоритм включая уже существующие устройства УФК
3. Новые технологии сортировочного процесса
Комплексный подход к автоматизации и механизации управления технологическим процессом сортировочной станции потребовал существенного пересмотра принципов создания технических средств и систем управления. От локальных устройств, автоматизирующих отдельные операции и включаемых операторами на время выполнения этих операций, осуществлён переход к непрерывно функционирующим системам управления технологическими цепочками, которые охватывают процедуры расформирования и формирования составов от входной до выходной горловины станции. Управление осуществляется на основе непрерывного потока информации от датчиков с контролем их функционирования и логической защитой от сбоев, что позволяет снизить влияние человеческого фактора и повысить безопасность технологического процесса.
Текущие значения параметров технического оборудования и движения вагонов определяются рядом случайных факторов: скоростью и направлением ветра, наличием механических препятствий, техническим состоянием устройств подвижного состава, которые не всегда можно учесть заранее. Поэтому сортировочный процесс по праву относится к нестационарным процессам, показатели которого должны оцениваться вероятностыми значениями, а модели объектов управления и алгоритмы принятия решений должны учитывать статистический характер контролируемых параметров и конечных результатов. С учётом влияния текущего состояния исполнительных устройств и датчиков на результаты управления, все технические средства имеют контроль исправности, включая правильность установки. А количество и размещение датчиков позволяет системам управления выявлять отказы и сбои отдельных устройств в автоматизированном режиме.
Наиболее значительными для обеспечения безопасности сортировочного процесса являются контроль свободности/занятости стрелочного участка и тормозной позиции. А также положение отцепа на стрелке или вагонном замедлителе. Для решения этих задач разрабатывается идеология комплексированной защиты, основанная на контроле одного показателя с помощью датчиков различной физической природы. Последние дополняют и проверяют друг друга с учётом возможностей систем управления по логической обработке поступающих внешних сигналов. Управляющие вычислительные комплексы систем управления строятся с учётом обеспечения безопасности функционирования аппаратно-программных средств. Это предполагает наличие двухканальной архитектуры с безопасной схемой сравнения или мажоритарного резервирования, позволяющих обнаруживать ошибки и парировать сбои, как собственного оборудования, так и напольных устройств.
Современные системы управления сортировочными процессом должны предусматривать автоматические режимы реконфигурации при опасности возникновения нештатных ситуаций с возможностью их ручной коррекции. Качество управления должно обеспечиваться автоматической адаптацией системы управления к меняющимся неконтролируемым параметрам и состоянию технических средств с учётом результатов управления.
Помимо удаленного мониторинга работы своих устройств, управляющие системы имеют возможность приёма исходной информации (программы роспуска, сортировочного листка, предупреждений, директив) от устройств информационно-планирующего уровня и передачи в обратном направлении автоматически регистрируемых в режиме реального времени результатов выполнения технологических операций.
Обеспечение безопасности технологического процесса при организации информационного обмена с верхним уровнем технических средств управления сортировочной станцией, к которым не предъявляются требования безопасности, предусматривает обязательное оснащение информационного стыка между уровнями управления, системой однонаправленных шлюзов, исключающих несанкционированное вмешательство из вне в процесс управления.
Системы управления отдельными технологическими операциями оснащаются встроенными устройствами контроля и диагностики, анализирующими сигналы управления всеми объектами, документирующими режимы функционирования постовых и напольных устройств, включая действия оперативного и обслуживающего персонала. Для этого созданы специализированные АРМы, которые дополняют управляющие системы или накладываются на действующие релейные устройства. Использование таких устройств позволяет сделать шаг вперед к переходу от профилактических к ремонтно - восстановительным методам обслуживания устройств.
Уже сегодня Комплексная система КСАУ СС обеспечивает:
- создание единой базы данных для всех служб, участвующих в технологическом процессе сортировочной станции, с выделением АРМов различной ориентации (техконторы, ШЧ, ТЧ и т.д.);
- распространение зоны автоматизации управления движением вагонов и локомотивов с сортировочной горки на всю территорию станции и создания системы мониторинга и накопления вагонов в сортировочном парке станции;
- автоматизацию документооборота и ввода исходных параметров входного потока (описателя отцепов) за счёт взаимодействия с АСОУП СС и ДЦ, стыковки с перегонными системами (ДК, СПДЛП) и системами считывания номеров вагонов (САИ);
- совершенствование структуры на базе модульных подсистем реального времени, объединённых скоростными каналами передачи информации, непосредственно связанных, с одной стороны с исполнительными устройствами, в том числе и по радиомодемам, а с другой - с системой управления движением верхнего уровня.
Настоящий эффект не может быть получен от модернизации по частям. Рассматриваемые задачи базируются на системных принципах. Это уже не только совершенствование устройств механизации и автоматизации на горке. Создана основа для реализации современных сортировочных комплексов на базе интегральной автоматизации станционных процессов и использования устройств автоматики в качестве источника точной информации в реальном масштабе времени для функционирования автоматизированных систем управления разного уровня.
Комплексная система управления сортировочной станцией на уровне автоматизации управления технологическими операциями, реализует следующие функции с использованием напольных и постовых технических средств, алгоритмов, систем и их взаимодействия:
Автоматизацию технологических операций: надвига и роспуска составов; управление маршрутами движения локомотивов и вагонов в свободном скатывании; управление торможением и регулирование скорости скатывания отцепов, обеспечивающего интервальное движение на спускной части горки и прицельное торможение на путях сортировочного парка.
Диагностический контроль с прогнозированием на уровне напольных устройств, постового оборудования и функциональных систем;
Диагностические функции реализуются как автономно в напольных и постовых устройствах, посредством встроенного и внешнего тестирования, так и на уровне тестирования системных и функциональных алгоритмов и приобретают категорию управленческих.
Обеспечение безопасности роспуска и формирования составов производится как на уровне технических, функциональных средств, так и на уровне алгоритмических. Системная и алгоритмическая избыточность используется для реализации реконфигурированных алгоритмов управления в нештатных ситуациях для парирования и предотвращения опасных ситуаций.
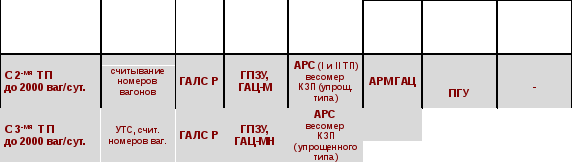
Рекомендации по оснащённости сортировочных станций в зависимости от их перерабатывающей способности приведены в таблице 1, где ГАЦ-М – микропроцессорная горочная автоматическая централизация; КТС ОДУ СГ – комплекс технических средств оперативно-диспетчерского управления сортировочной горкой - горочный микропроцессорный пульт; ГПЗУ (КВГ)- горочное программно-задающее устройство (контроллер вершиной горки); ГАЛС - горочная автоматическая локомотивная сигнализация с передачей информации по радиоканалу и управлением локомотивами; УУПТ - устройство управления прицельным торможением; КСАУ КС - комплексная система автоматизации вагонного управления компрессорной станцией.

Т









аблица
1.
7. 2. Перспективные технологии повышения безопасности движения и маневровой работы на станции
Анализ столкновений, произошедших в 2005 – 2006 г.г. на станциях Северной ж.д. и Горьковской ж.д. показал, что все они были обусловлены одинаковыми причинами:
не наблюдение за показаниями светофоров,
не соблюдение скоростного режима,
отсутствие у машиниста информации о расстоянии до запрещающего сигнала или тупиковой призмы.
В настоящее время разработана технология повышения безопасности на базе, которой разработаны технические средства Маневровой автоматической локомотивной сигнализации (МАЛС), а также станционные устройства многоуровневой системы управления и обеспечения безопасности (МС), позволяющие взаимодействовать с маневровыми (оборудованными МАЛС) и поездными локомотивами (оборудованными КЛУБ-У) по цифровому радиоканалу.
Ниже, на основе разбора столкновений, произошедших на станциях Лоста, Ярославль – Главный Северной ж.д., ст. Балезино Горьковской ж.д. проведено моделирование использования технологии повышения безопасности движения на основе МАЛС и МС.
Разбор столкновения произошедшего на станции Лоста Северной ж.д. 27.10.2005 года.
Пpиоритеты хозяйств в КСАУ СП.
|
Функция |
По службе Д |
По службе Ш, Т |
|
1 |
2 |
3 |
|
1.ГАЛС Р |
1.1 Контроль за соблюдением технологии обработки составов: закрепление , ограждение. |
1.1 Обеспечение безопасности надвига и роспуска за счёт непрерывной цепи управления ДСП-ДСПГ- машинист локомотива |
|
1.2 Мониторинг перемещений вагонов и локомотивов. |
1.2. Автоматическая корректировка скорости при нагонах и малых интервалах. | |
|
1.3 Заполнение путей парков станции наличие проходов |
1.3 Улучшение видимости (локомотивный светофор) | |
|
1.4 Пономерной учёт башмаков. |
1.4 Исключение проезда запрещающего сигала, взрезов стрелки, соударении при манёврах, подтягивании, попутном надвиге. | |
|
1.5 Контроль за работой маневровых локомотивов со стороны ДСП (скорость, направление движения) |
1.5 Контроль состояний приборов централизации, ГАЛС Р, действий ДСП и маневрового локомотива. | |
|
1.6 Расчленённый простой локомотивов, вагонов |
1.6 Контроль скоростного режима | |
|
1.7 График исполненной работы станции |
1.7 Протоколирование, регистрация, архив. Послеситуационный анализ на основе воспроизведения ситуации. | |
|
1.8 Электронный журнал. |
1.8 Послеситуационный анализ с воспроизведением. | |
|
1.9 Ввод предупреждения и их соблюдение. |
1.9 Увязка роспусков с возможностью снижения давления в магистрали в перерывах. | |
|
1.10 Совмещённый протокол: скоростемерная лента, приборы ЭЦ, маршруты, сигналы в реальном времени |
1.10 Экономия дизельного топлива | |
|
1.11 Минимизация времени надвига – надвиг с переменной скоростью |
1.11 Расчёт тормозной кривой | |
|
2. КВГ |
2.1Контроль правильности расцепа |
2.1 Задание допустимой скорости роспуска |
|
2.2 Синхронизация маршрутов с ходом роспуска |
2.2 Перекрытие сигнала и снижение скорости при сбоях и нагонах | |
|
2.3 Синхронизация скоростей с ходом роспуска |
2.3 Применение малопроводной и энергосберегающей схемы указателей количества вагонов | |
|
2.4 Управление расцепщиками, в том числе, при неправильном расцепе. |
| |
|
2.5 Снижение нагрузки на ДСПГ по управлению локомотивом и расцепщиками |
| |
|
3. ГАЦ |
3.1 Реализация программы роспуска |
3.1 Наличие автоматического и маршрутного режимов. |
|
3.2 Предварительная установка маршрутов |
3.2 Защита стрелочных участков от перевода стрелок под вагонами, в том числе и длиннобазных. | |
|
3.3 Контроль исполненного роспуска |
3.3 Автоматическая синхронизация потока отцепов и маршрутов по счётчикам осей. | |
|
3.4 Контроль манёвров на горке |
3.4 Программный автовозврат | |
|
3.5 Восстановление маршрута при ликвидации нагона |
3.5 Контроль и предотказная диагностика напольных и постовых устройств. | |
|
3.6 Контроль негабарита при установке маршрута. |
3.6 Автоматическое измерение токов и напряжений | |
|
3.7 Исключение маршрута на путь, занятый локомотивом |
3.7 Послеситуационный анализ с воспроизведением | |
|
3.8 Оперативная коррекция маршрутов |
3.8 Исключение перевода стрелок при угрозе боковых ударов | |
|
3.9 Возможность автоматического формирования программы для повторного роспуска. |
3.9 Автоматическая реконфигурация системы управления при сбоях и отказах устройств. | |
|
3.11 Трансляция описателя отцепа |
3.11 Резервированная система управления | |
|
3.12 Безбумажная технология |
| |
|
3.13 Исключение зависимости от погодных условий |
| |
|
3.14 Мониторное отображение процесса |
| |
|
3.15 Вывод на экран диагностических сообщений |
| |
|
4. УУПТ и КЗП
|
4.1 Интервальное и прицельное вытормаживание на трёх тормозных позициях. |
4.1 Автоматизированное вытормаживание отцепов на всех трёх тормозных позициях. |
|
4.2 Поосный учёт распределения веса |
4.2 Определение ходовых свойств отцепов | |
|
4.3 Определение заполнения путей и длины окон |
4.3 Учёт метеоусловий | |
|
4.4 Безопасное проталкивание |
4.4 Наличие обратной связи по датчику давления | |
|
4.5 Мониторный контроль весовой категории и текущей скорости движения. |
4.5 Наличие плавной шкалы управления. | |
|
4.6 Исключение из техпроцесса башмачников и операторов резервных постов управления |
4.6 Наличие обратной связи по результатам скатывания (КЗП) | |
|
4.7 Контроль профиля в сортировочном парке |
4.7 применение плавных, адаптивных методов торможения с подстройкой под особенности замедлителя. | |
|
4.8 Двухпозиционное вытормаживание отцепов при накоплении выше III тормозной позиции. |
4.8 Учёт результатов торможения отцепа на верхних тормозных позициях для выбора управления на нижних тормозных позициях. | |
|
4.9 Учёт особых признаков вагонов при вытормаживании отцепов |
4.9 Повышение надёжности управления введением комплексирования датчиков на тормозной позиции (РИС, УСО, РЦ, весомер) | |
|
4.10 Исключение затормаживания локомотивов в автоматическом режиме. |
4.10 Выбор траектории торможения (интервального регулирования) исходя из параметров: длина тормозного пути, интенсивность торможения | |
|
|
4.11 Применение алгоритмов разделения отцепов на ТП из двух независимо управляемых замедлителей | |
|
|
4.12 Применение энергосберегающих алгоритмов вытормаживания отцепов | |
|
|
4.13 Контроль и предотказная диагностика напольных и постовых устройств. | |
|
|
4.14 Анализ ситуации с возможностью воспроизведения последовательных событий в режимах переменного времени (ускорение и замедление) | |
|
|
4.15 Аварийное вытормаживание при сбоях и отказах устройств | |
|
|
4.16 Резервирование системы управления. | |
|
5 КСАУКС |
5.1 Автоматическое поддержание давления в магистралях при роспуске |
5.1Автоатическое управление компрессорными установками и компрессорной станцией |
|
|
5.2 Непрерывный контроль давления и его индикация на мониторе |
5.2 Аварийная остановка компрессорных установок |
|
|
5.3 Предупреждение роспуска (перекрытие сигнала) при снижении давления ниже допустимого |
5.3 Автоматическое включение и выключение компрессорных установок при изменениях давления |
|
|
|
5.4 Протоколирование и архивация |
|
|
|
5.5 Сокращение расходов энергии на вытормаживание |
|
|
|
5.6 Снижение давления при утечках между роспусками. |