

256 |
Глава 7 |
пары кварцевых маятников, совершавших колебания в параллельных плоскостях на гиро
стабилизированной платформе) на большом надводном судне (±50-100мкм·с- 2 ) 1 >.
Создание и широкое использование морских гравиметров (разд. 7.3.2 -7.3.5) сделало маятниковые измерения на море нецелесообразными (устаревшими).
7.3.2.Рычажные пружинные системы
Начиная с середины 1950-х rr. рычажные пружинные весы (разд. 6.2.2), успешно при менявшиеся в сухопутных гравиметрах, стали приспосабливать для работ на море и испы тывать на подводных лодках. В 1957 г. начаты пробные измерения на надводных судах (морские гравиметры), а в 1958 г.- на самолетах (аэрогравиметры). Особенно широкое применение нашли крутильные пружинные весы (система Аскания) и астазированные ры чажные гравиметры (система Ла КостаРомберга).
Морская гравиметрическая система Kss5 (Bodenseewerk Geosystem GmbH, Ибер линген, Германия) содержит гравиметрический датчик с электронным управлени ем, гиростабилизированную платформу с электронным блоком управления, ис
точник питания и блок регистрации данных. Гравиметрический датчик Gss20 ра ботает по принципу гравиметров Аскания моделей Gsll/Gs\5 (разд. 6.5.2) и пред
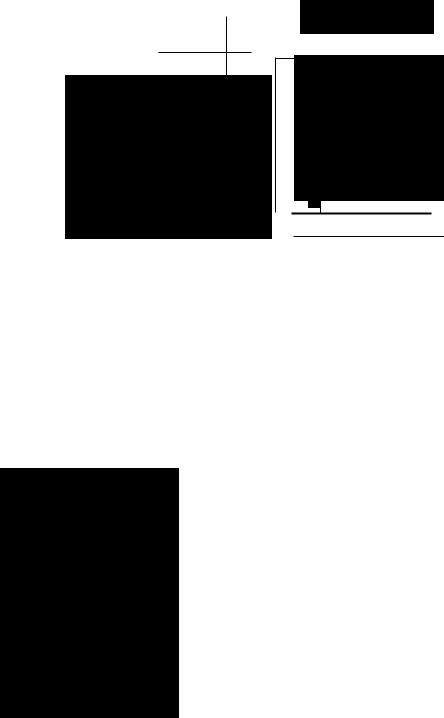
ставляет собой усовершенствованную упругую систему морского гравиметра Gss2 [234, 608] (рис. 7.10). Плоский алюминиевый рычаг (длина 0,3 м, период ко лебаний Т= 6 с) удерживается в положении равновесия горизонтальными спи ральными пружинами. Боковые смещения ограничены 8 проволочными растяж
ками из вольфрама, а повороты в значительной степени подавляются магнит
ным демпфированием. Фотоэлектрический сигнал положения рычага использует
ся для возврашения его в нулевое положение с помошью системы управления
(усилитель, шагавый сервомотор), микрометреиного винта и слабой измеритель
ной пружины; положение пружины непрерывно регистрируется (в аналоговой или цифровой форме). Интерфейс навигационной системы позволяет записывать всю информацию, необходимую для последующей обработки (кросс-каплинг, эф фект Этвёша). Для стабилизации двухосной платформы (0,95 х 0,72 х 0,76 м, 230 кг, диапазон наклонов ± 23 о, период колебаний 5 мин) используется верти кальный гироскоп фирмы Anschi.itz, подключенный к платформе через контур
системы регулирования и обеспечивающий долговременную точность ± 3' (при
горизонтальных ускорениях менее 0,3 g, 25 с). |
Общий |
вид системы показан на |
рис. 7.11. |
|
|
Диапазон измерений датчика Gss20 составляет |
70 000 |
мкм ·с- 2 , величина дрейфа |
нуль-пункта лежит в пределах 30 мкм ·с- 2 /мес. Ошибка измерений в стационарном поло
жении ± 1 мкм ·с- 2 , а в динамическом режиме в зависимости от состояния |
моря ± 10- |
||||
30 мкм · с- 2 • |
При обычных съемках с последующей обработкой (разд. 7.4.1) |
ошибки со |
|||
ставили ± 7 мкм ·с- 2 (штиль) и ± 10 мкм ·с- 2 (бурное море), ащ(t) = 0,15 |
- 0,8 м· с 2 |
||||
h(t) = |
0,025 - |
0,25 м. с- 2 . |
|
|
|
|
|
|
|
|
|
t> |
Отметим |
морские автоматизированные маятниковые nриборы конструкции |
|
ЦНИИГАнК: |
|
АМП-1 (1968 г.), главным образом для работы на nодводных лодках, АМП-2 (1971 |
г.) с цифровой |
||||
фильтрацией единичных nериодов колебаний маятников, а также донно-nоnлавковый nрибор ПДМ.
Маятниковые измерения на море служат nреимущественно как оnорные для контроля надводных гра виметров. - Прим. ред.
Измерения силы тяжести в труднодостуnных районах |
257 |
Рис. 7.10 (левый). Чувствительная система гравиметрического датчика Gss20 морского гравиметра
Kss5, фирма Bodenseewerk Geosystem GmbH, Иберлинген (1979 г.).
Рис. 7.11 (nравый). Морской гравиметр Kss5 с гироnлатформой, вертикальным гироскоnом и грави
метрическим датчиком. Gss20, фирма Bodenseewerk Geosystem GmbH, Иберлинген (1979 г.).
Аэроморской гравиметр Ла КостаРомберга [393] представляет собой сильнодемпфированную (воздушное демпфирование) и сильноастазированную
(почти неопределенное равновесие) модификацию сухопутного гравиметра Ла
КостаРомберга с ограничением боковых смещений рычага (разд. 6.5.4). До 1965 г. прибор устанавливался в кардановом подвесе, а направление мгновенной
вертикали определялось с помощью двух длиннопериодных l'rfаятников
(Т= 2 мин). С этим прибором при вертикальных ускорениях до 0,5 м ·с- 2 была
достигнута точность ± 40 мкм · с- 2 • С 1965 г. гравиметр стали устанавливать на
гироплатформе (гироскоп фирмы Honeywell 0,56 х 0,71 х 0,64 м, 70 кг, диапазон
наклонов ± 30°, регулируемый период колебаний от 4 до 17 мин, долговременная
точность не хуже ± 1').
Помимо гравиметрического датчика и гироплатформы система содержит электронный блок управления и блок регистрации (в аналоговой или цифровой форме, с магнитной записью) (рис. 7.12). Коромысло гравиметра медленно воз
вращается автоматической системой управления в нулевое положение с помощью микрометрениого винта и удерживающей пружины. Если в (7 .3) основную роль
будет играть демпфирующий член, после осреднения средняя величина силы тя-
жести составит |
- |
|
- |
|
|
|
g = |
2oz + J |
|
(7.27а) |
|
и с учетом (6. 74) |
при а "" 90° |
|
|
|
|
|
- |
- |
k |
- |
|
|
g = 2o.t |
+ - |
d. |
(7.27б) |
|
т
Среднее измеренное значение пол~чается, таким образом, по скорости движе ния рычага и среднему расстоянию d (от оси вращения до точки крепления пру-
жины). _
Для вычисления величины g по формуле (7 .27б) регистрируют отклонения ко ромысла и положение микрометрениого винта. Компьютер обрабатывает эти
258 |
Глава 7 |
Гориэ, ускор.
Гориэ. ускор.
~ Положение рычага
~
~
с
РегистрациR (магнит. лента, самописец)
Рис. 7.12. Схема аэроморского гравиметра Ла Коста - Ромберга [393].
результаты, а также фильтрует вертикальные ускорения (зависящие от состояния
моря) и вычисляет поправку за кросс-каплинг (по измерениям горизонтальных ускорений). Дополнительно может выполняться анализ взаимной корреляции
между показаниями гравиметра и скоростью судна или ускорениями; кроме того,
может быть введена поправка, устраняющая эту корреляцию. Можно использо
вать трехгироскопную инерциальную навигационную систему для вычисления по
правки Этвёша в реальном масштабе времени. С 1982 г. появилась возможность использовать микропроцессорвый блок управления и регистрации данных для
контроля положения осей гироплатформы и гравиметра, а также для регистра
ции гравиметрических данных и записи их на магнитную ленту [729]. На рис. 7.13 показан общий вид системы.
Рис. 7.13.
Аэроморской гравиметр Ла Коста - Ромберга с грави метрическим датчиком и блоком сбора и обработки данных (фотография nредоставлена фирмой La Coste
and Romberg Gravity Meters, lnc., Остин, Техас).

Измерения силы тяжести в труднодоступных районах |
259 |
Диапазон измерений аэроморского гравиметра составляет 120 000 мкм · с - 2 • |
Дрейф |
нуль-пункта практически линейный и не превышает 10 мкм ·с- 2 /мес. Статическая ошибка
±О, 1 мкм · с- 2 , ошибка в динамическом режиме ± 2,5 |
мкм · с- 2 в лабораторных условиях, |
|
на море- ± 1О мкм · с- 2 при ускорениях до 1 м · с- 2 • |
Прибор работает при вертикальных |
|
ускорениях до 5 м · с- 2 (Т = 7 |
с) и 10 м · с- 2 (Т = 3,5 с). На вертолете можно получить |
|
точность ± 20 мкм · с- 2 , ана |
самолете ±50100 мкм · с- 2 (разд. 7.4.2). |
|
В 1960-х гг. морские гравиметры были созданы в СССР (Институт физики Земли Ака демии наук) по принципу гравиметра Норгарда (разд. 6.5.1) с жидкостным демпфировани ем кварцевой системы и фотоэлектрической регистрацией. При работе с карданоным под
весом и осреднении за 5 - 1О мин получена точность ± 3080 мкм · с- 2 •>. В 1970-х rr.
в Китае (Государственное сейсмологическое бюро Института сейсмологии) был создан
гравиметр ZYZY с металлической пружиной (пружина нулевой длины, электрическая ин
дикация положения рычага, двойное термостатирование, вычислитель кросс-каплинга, ги
роплатформа); точность измерений с гравиметром (включая ошибки определения коорди
нат) составляет несколько мкм ·с- 2 [786]. С 1983 г. успешно используется система DZY-2.
7.3.3.Измерительные системы с вертикальной пружиной
В отличие от систем с горизонтальным рычагом (круговое движение центра
масс) гравиметры, в которых пробпая масса перемещается только по вертикали (разд. 6.2.1), свободны от эффекта перекрестной связи между вертикальными и горизонтальными ускорениями (разд. 7.2.3).
Аэроморская гравиметрическая система KssЗ0/31 (Bodenseewerk, Иберлинген,
Германия) состоит из гравиметрического датчика, гироплатформы и основного
электронного блока для гравиметра и гиростабилизации, который содержит про
цессор. и блок вывода информации (регистрация аналоговая и на магнитной лен
те) (рис. 7.14). Гравиметрический датчик GssЗO (ранее, с 1970 г., применялея морской гравиметр Аскания GssЗ) содержит неастазированную осесимметричную систему с массой, подвешенной на пружине (рис. Груз, изготовленный в
виде вертикальной трубки, удерживается пятью горизонтальными нитями, каж
дая из которых натянута пружиной, так что он может перемещаться без трения
лишь по вертикали.
Пружина, находящаяся внутри трубки, противодействует силе тяжести и со здает равновесие. Смещение груза воспринимается емкостным датчиком; после преобразования сигнала датчика в электронном блоке выходное напряжение бло
ка используется для приведения груза в нулевое положение и демпфирования вер тикальных возмушаюших ускорений. Компенсация и демпфирование осушествля
ются благодаря катушке на нижнем конце трубки, находяшейся в поле постоян
ного магнита. Изменения положения катушки порождают электрический ток,
пропорциональный изменению силы тяжести; сигнал поступает в блок накопле
ния данных. Измерительная система помещена в герметичный контейнер с двой
ным термостатированием и магнитным экраном. Пользователь может контро
лировать калибровочный коэффициент ( ±0,50Jo) с помошью дополнительной мае-
1> С 1974 г. московский завод «Нефтекип» выпускает надводный гиростабилизированный кварце
вый гравиметр ГМН конструкции ВНИИГеофизики, построенный по замкнутой схеме. Точность из
мерений ± 5 мкм · с- 2 при ускоренних до 0,3 м · с- 2 • - Прим. ред.
Измерения силы тяжести в труднодоступных районах |
261 |
Рис. 7.16 (левый). Гравиметрический датчик GssЗO и гироплатформа КТ 30 (фотография nредоставлена фирмой Bodeпseewerk Geosystem GmbH, Иберлинген).
Рис. 7.17 (правый). Аэроморская гравиметрическая система KssЗI с гироплатформой, гравиметриче ским датчиком GssЗO, подсистемой управления данными и принтером (фотография предо
ставлена фирмой Вodeпseewerk Geosystem GmbH, Иберлинген).
тов судна и движения по криволинейному маршруту. Последуюшей обработкой можно
уменьшить ошибку измерений еше на 400Jo. Прибор сохраняет работоспособность при вер
тикальных ускорениях до 4 мс- 2 •
Примерно в 1980 г. появился гравиметр Ла КостаРомберга с поступа
тельным перемещением пробной массы [395]. В этом приборе осесимметричный
цилиндрический груз удерживается в равновесии двумя наклонными пружинами
нулевой длины, прикрепленными к грузу с разных сторон (рис. 7.18). Груз связан с корпусом шестью горизонтальными тя1ами (5 жестких и одна упругая) и мо
жет перемещаться лишь по вертикали. Чувствительность этой сильно астазиро
ванной системы можно изменять с помощью упругой связи. Величина смешения
регистрируется емкостным датчиком, система приводится в нулевое положение
с помощью плоской пружины, которая связана с корпусом через микрометрен
ный винт и прикреплена к верхнему концу удерживающей пружины. Смещения
Ось
Рис. 7.18.
Принцип осесимметричного гравиметраЛа Коста - Ромбер
га [395].
262 |
Глава 7 |
груза остаются небольшими благодаря сильному жидкостному демпфированию
(силиконовая жидкость). В отличие от систем с горизонтальным рычагом (разд. 7.3.2) система с поступательным перемещением помимо отсутствия кросс
каплиига малочувствительна к ударам и вибрациям; более того, она имеет ряд
преимуществ при изготовлении и калибровке. Пробные измерения при различном
волнении моря показали точность не хуже ± 10 мкм · с- 2 [727] (разд. 7.4.1).
В 1980-х гг. в Уханьеком институте геодезии и геофизики Академии наук Ки тая была создана система с поступательным перемещением пробной массы (гра
виметр CHZ). Эта система аналогична осесимметричному гравиметру Ла Кос
таРомберга. Она может работать при вертикальных ускорениях до 5 м · с- 2
и горизонтальных ускорениях до 2 м · с- 2 • При сравнениях с системой Kss30
(разд. 7.3.2) расхождения в среднем составили ± 14 мкм ·с- 2 [791].
7.3.4.Струнные гравиметры
Гравиметры, основанные на принципе вибрирующей струны, по сравнению с пружинными при работе на подвижном основании имеют ряд преимуществ (ма лые размеры, большой динамический диапазон, малая чувствительность к сотря
сениям, простота |
цифровой |
обработки |
данных, |
малый кросс-каплинг) |
(разд. 6.1.4). Первый |
струнный |
гравиметр |
был создан |
Джильбертом в 1949 г. |
для работы на подводных лодках [218]. ПозЖе морские струнные гравиметры
разрабатывались и успешно применялись в Японии, США и СССР. Ошибки из
мерений составляли ± 1О - 20 мкм · с - 2 •
Морской надводный гравиметр Токио (TSSG), созданный в Геофизическом
институте Токийского университета, представляет собой систему с одной стру
ной. Струна из сплава бериллия и меди (длина 25 мм, |
ширина О, 1 мм, толщина |
0,01 мм, 15 г) совершает колебания в магнитном поле |
на резонансной частоте |
(около 2000 Гц), колебания поддерживаются с помощью обратной связи [687].
Горизонтальные перемещения исключаются благодаря четырем нитям, связыва ющим пробную массу с корпусом. Прибор установлен на платформе с верти кальным гироскопом. Частота измеряется в интервалах 5 или 100 с. После пре образования в величину ускорения выполняется цифровая низкочастотная филь
трация. С начала |
1960-х rr. гравиметр TSSG широко применялея при съемках |
в северо-западной |
части Тихого океана [628]. |
-Слабая nружина
Струна
Рис. 7.19.
Принцип струнного акселерометра МП (Массачусетсского тех нологического института) [770].