Портнов лекция 2 / Л2
.docЛ2 СМ
2013-09-10
|
1.2. Структурний аналіз плоских стержневих систем. Представлення стержневої системи у вигляді системи шарнірно з’єднаних жорстких дисків. Структурний аналіз плоских стержневих систем. Дослідження геометричної незмінності стержневих систем. Умова статичної визначеності стержневих систем. Властивості статично визначених стержневих систем. |
2 |
Кінематичний аналіз споруд |
2 1* |
Кінематичний аналіз схем 2 години (5 годин) |
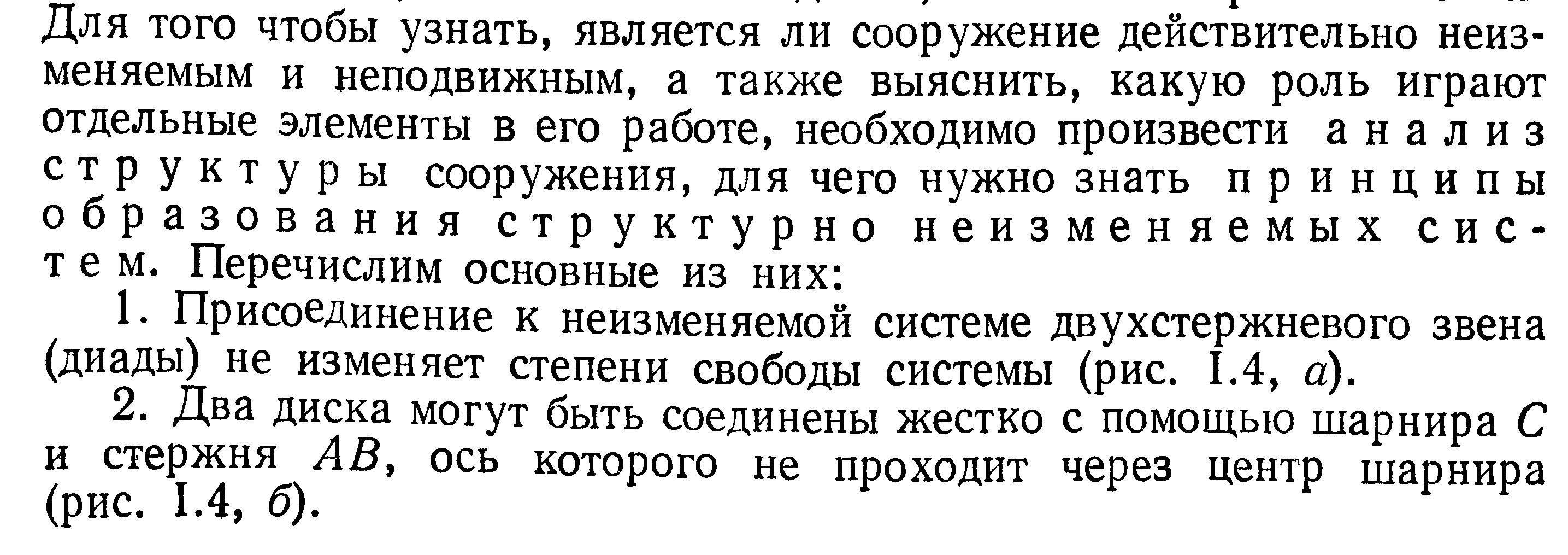
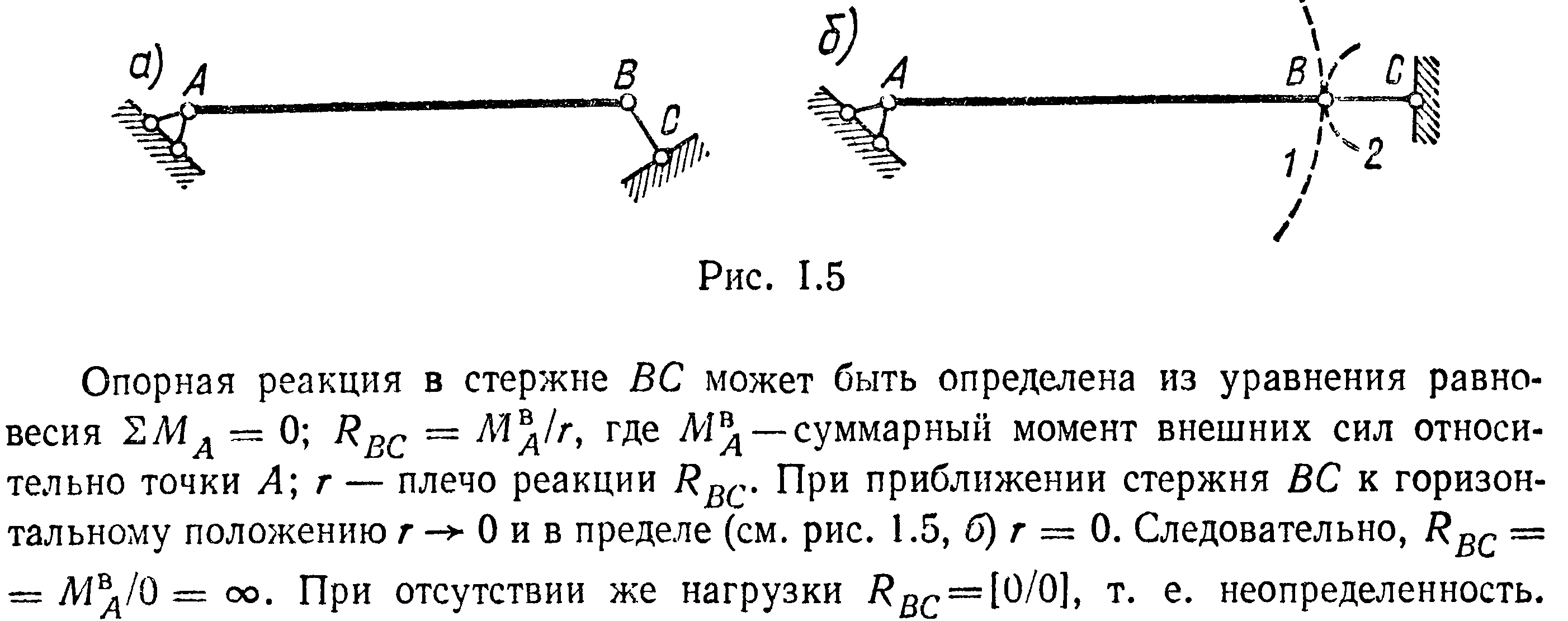
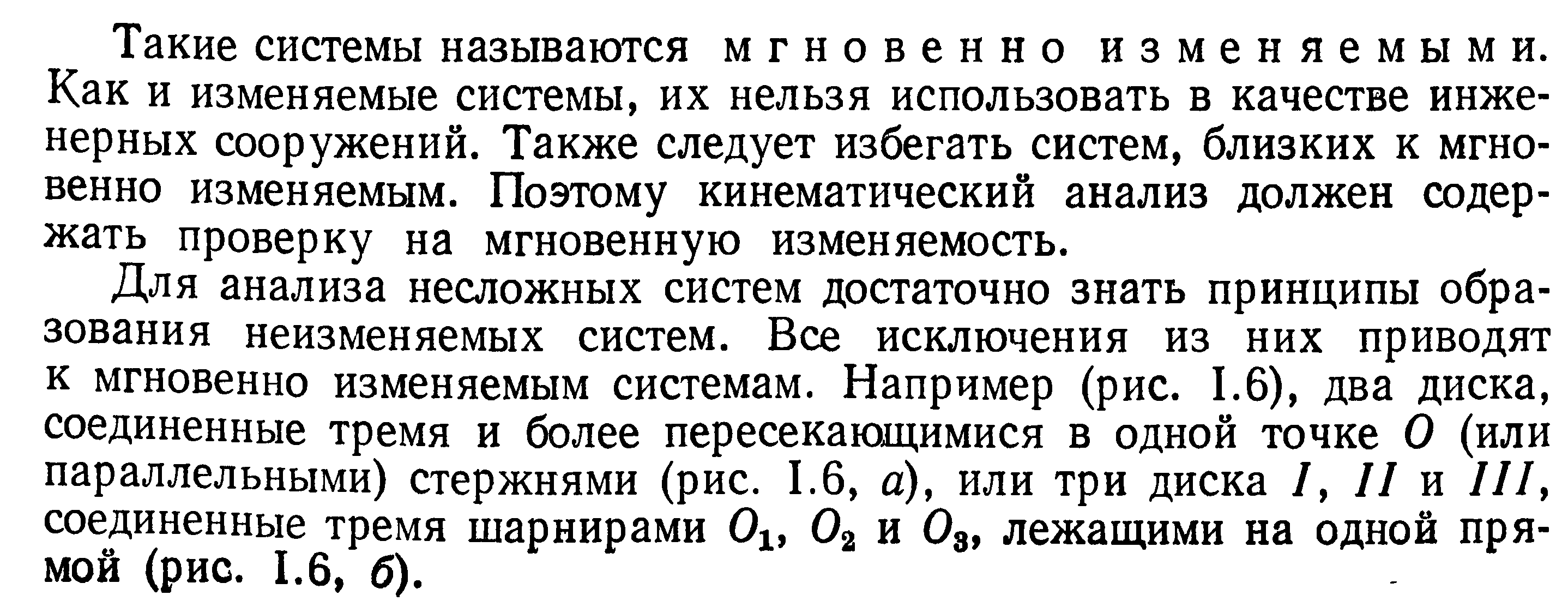
Начинать расчёт сооружения имеет смысл лишь тогда, когда установлено, что он вообще может быть выполнен методами строительной механики. Поэтому необходима предшествующая расчёту оценка расчётной схемы рассматриваемой системы, называемая кинематическим анализом сооружения (системы).
К и н е м а т и ч е с к и й а н а л и з – это исследование расчётной схемы сооружения, выполняемое до начала расчёта с целью определения кинематического качества системы (геометрической неизменяемости, мгновенной изменяемости или геометрической изменяемости), а в случае геометрической неизменяемости системы – для выявления её статической определимости или неопределимости.
Кинематический анализ позволяет своевременно обнаружить системы, расчёт которых либо вообще невозможен методами механики деформируемых тел – геометрически изменяемые системы, либо может выполняться с использованием особых подходов – системы мгновенно изменяемые. Кроме того, в результате кинематического анализа выясняется, как именно предстоит рассчитывать систему – достаточно ли для определения усилий в системе одних только уравнений статики (в случае статически определимой системы) или необходимо рассматривать все три стороны задачи расчёта деформируемой системы – статическую, геометрическую и физическую (если система статически неопределимая).
Сооружение, выполненное из отдельных элементов, может воспринимать любую нагрузку только в том случае, если оно сохраняет свою форму и положение. Другими словами, сооружение должно быть неподвижным и геометрически неизменяемым.
Подвижность сооружения характеризуется его степенью свободы, т. е. числом геометрических параметров, которые характеризуют положение элементов сооружения на плоскости или в пространстве. Геометрически неизменяемыми называются такие сооружения, форма которых не может изменяться без деформации их отдельных элементов.
При анализе расчетных схем сооружений важны следующие понятия: геометрическая неизменяемость, диск, кинематическая связь, степень свободы, степень статической неопределимости. Отдельные геометрически неизменяемые плоские элементы сооружения называются дисками. Каждый брус или стержень можно рассматривать как диск.
Диск имеет на плоскости три степени свободы: он может перемещаться поступательно в двух направлениях и поворачиваться вокруг любой точки. Для обеспечения неподвижности диска на него нужно наложить три связи. Связи чаще всего накладывают в виде опорных стержней и шарниров. Стержень лишает диск одной степени свободы, т. е. препятствует перемещению диска в направлении стержня. Шарнир лишает диск двух степеней свободы, т. е. возможности перемещаться в двух направлениях, оставляя возможность поворачиваться.
Шарнир может быть простым и кратным. Простой шарнир соединяет два диска, кратный шарнир соединяет n дисков и эквивалентен п-1 простым шарнирам, где п – число соединяемых дисков.
Обозначим степень свободы системы (степень подвижности) W, число дисков — Д, число простых шарниров – Ш, число опорных стержней –C0. Тогда степень свободы всей системы выразится так:
W = 3 × Д – 2 × Ш - C0.
Анализ результатов, полученных по этой формуле, дает следующее:
При W > 0 система подвижная, не имеет достаточного количества связей и поэтому явно геометрически изменяема.
При W = 0 система обладает достаточным количеством связей и может быть неподвижной и геометрически неизменяемой.
При W < 0 система обладает лишними связями и может быть неподвижной и геометрически неизменяемой.
Однако во втором и третьем случаях систему можно считать пригодной для сооружения только при правильном размещении связей, т. е. нельзя ограничиваться определением степени свободы
Для шарнирно-стержневых систем (ферм), т. е. систем, состоящих из стержней, соединенных между собой по концам шарнирами (причем каждый стержень прикрепляется к соседним только двумя шарнирами), степень свободы может быть определена по более простой формуле:
W = 2У-С-С0
где У — число узлов фермы; С — число внутренних стержней фермы; С0 — число опорных стержней. Эта формула получена исходя из того, что каждый узел, как точка, имеет на плоскости две степени свободы, а каждый стержень, соединяющий два узла, или опорный эквивалентны одной связи, так как налагает на координаты этих точек единственное условие — постоянство расстояния.