

ТММ / Схема 09 - Кінематика
.doc
1 .
ВСТУП
.
ВСТУП
Курсовий проект на тему “Двигун внутрішнього згоряння ” виконано по варіанту 09.__, який розроблено на кафедрі ДМ та ПМ і видано до проектування 11 вересня 2014 року.
2. ПРИЗНАЧЕННЯ ТА ГАЛУЗЬ ЗАСТОСУВАННЯ
Кривошипно-повзунний механізм перетворює зворотно-поступальний рух повзуна у обертальний рух кривошипа. Передача руху від повзуна до кривошипа здійснюється через шатун. Цикл руху поршнів включає такти розширення, впуск, випуск стискування. На кривошипному валу сидить кулачок, штовхач якого приводе в дію діафрагму паливного насосу.
Передача руху на колеса здійснюється через коробку передач і редуктор заднього мосту. Коробка передач має планетарний редуктор і зовнішню ступінь зачеплення.
3.Технічна характеристика
Коефіцієнт нерівномірності руху: δ = 1/75
Хід поршня: S = 0,13 м
Максимальне стискання: P = 5,6 МПа
 4.
РОЗРАХУНКИ, ЩО ПІДТВЕРДЖУЮТЬ
РОБОТОСПРОМОЖНІСТЬ КОНСТРУКЦІЇ
4.
РОЗРАХУНКИ, ЩО ПІДТВЕРДЖУЮТЬ
РОБОТОСПРОМОЖНІСТЬ КОНСТРУКЦІЇ
4.1 Кінематичний аналіз двигуна внутрішнього згорання
Вихідні дані:
Швидкість поршня Vср = 8,6 м/с
Відношення λ = 0,2
Хід поршня S = 0,13 м
4.1.1. Структурний аналіз механізму
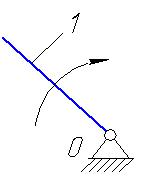
Основою виконуючого механізму двигуна внутрішнього згорання є трьох-ланковий кривошипно–повзунний механізм (рис. 1.)

Рис. 1. Кінематична схема механізму двигуна внутрішнього згорання
Механізм має 4 ланки. Одну нерухому (стояк) та 3 рухомих (рис. 1., табл.4.1.1).
 Таблиця
4.1.1
Таблиця
4.1.1
Таблиця рухомих ланок
|
Позначення |
Умовне зображення |
Назва |
|
1 |
|
Кривошип |
|
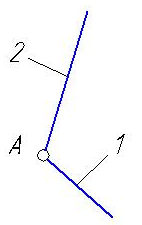
2 |
|
Шатун |
|
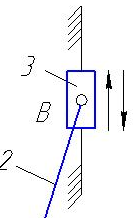
3 |
|
Повзун |

Ланки складають сім нижчих кінематичних пар V-го класу.
Таблиця 4.1.2
Таблиця кінематичних пар
|
Позначення |
Умовне зображення |
Клас |
Назва |
|
О1 (0; 1) |
|
V |
Нижча обертальна |
|
A (1; 2) |
|
V |
Нижча обертальна |
|
B (2; 3) |
|
V |
Нижча обертальна |
|
B (3; 0) |
V |
Нижча поступальна |
 Визначаємо
ступінь рухомості механізму за формулою
Чебишева:
Визначаємо
ступінь рухомості механізму за формулою
Чебишева:
W = 3 × n – 2 × p5 – p4,
де n – кількість рухомих ланок механізму;
p5., p4 – кількість кінематичних пар відповідного класу.
W = 3 × 3 – 2 × 4 – 0 = 9 – 8 = 1.
Розбиваємо механізм на групи Ассура і класифікуємо їх.
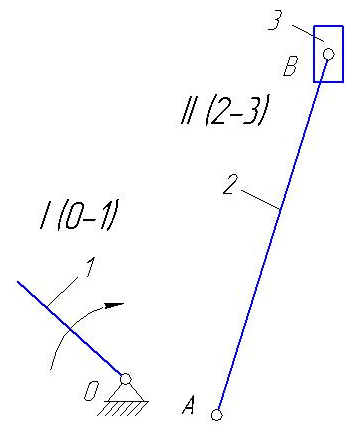
Формула будови механізму має вигляд:
I(0-1)®II(2-3)
Механізм відноситься до II класу.
4.1.2. Синтез механізму
Задачею геометричного синтезу механізму є визначення невідомих лінійних параметрів або координат нерухомих точок.
Визначаємо: число обертів кривошипа:
![]()
Радіус кривошипа:
![]()
Довжина шатуна:
![]()
 Побудову
механізму ведемо методом засічок, при
цьому масштабний коефіцієнт довжини
приймаємо:
Побудову
механізму ведемо методом засічок, при
цьому масштабний коефіцієнт довжини
приймаємо:
![]() ,
,
де ОА – довжина відрізка, який зображує кривошип на креслені, мм.
4.1.3. Побудова графіків переміщення, швидкостей та прискорень т. В
Для
побудови графіків переміщення, швидкостей
та прискорень т. В,
яка
належить повзуну, на осі абсцис відкладаємо
відрізок L,
мм,
що в масштабі
![]() буде часом одного повного оберту
кривошипа.
буде часом одного повного оберту
кривошипа.
![]() масштаб
часу, с/мм
масштаб
часу, с/мм
де
n
– частота обертання кривошипа,
![]()
![]() с/мм.
с/мм.
Поділимо
відрізок L
на
8 рівних частин і в точках поділу 0, 1, 2 …
8 відкладаємо вздовж осі ординат відрізки
0-1,0-2,0-3,0-4, які в масштабі
![]() (
(![]() )
зображають переміщення повзуна В
від крайнього лівого положення В0
1/8 оберту кривошипа. Сполучивши отримані
точки, дістанемо графік пройдених шляхів
SB
= SB(t).
)
зображають переміщення повзуна В
від крайнього лівого положення В0
1/8 оберту кривошипа. Сполучивши отримані
точки, дістанемо графік пройдених шляхів
SB
= SB(t).
Для побудови графіка швидкостей використовуємо метод графічного диференціювання. Для цього з’єднуємо хордами О1/, 1/2/..7/8, відповідні інтервали на графіку переміщень. Вибираємо полюсну відстань Н1 на продовженні осі абсцис із точки О1, проводимо промені паралельно відповідним хордам до перетину з віссю ординат. Із отриманих точок проводимо лінії паралельні осі абсцис. З’єднавши всі точки отримаємо графік швидкостей точки В . Масштаби графіка визначаємо за формулою:
![]() .
.
 Аналогічно
будуємо графік прискорень з графіка
швидкостей, використовуючи метод
графічного диференціювання. Масштаб
графіка прискорень визначаємо за
формулою:
Аналогічно
будуємо графік прискорень з графіка
швидкостей, використовуючи метод
графічного диференціювання. Масштаб
графіка прискорень визначаємо за
формулою:
![]() .
.
4.1.4. Побудова планів швидкостей
Кутова швидкість кривошипа:
![]()
Знайшовши кутову швидкість, шукаємо лінійну швидкість точки А, яка належить кривошипу.
Лінійна швидкість точки А:
![]()
де
![]() – кутова швидкість кривошипа;
– кутова швидкість кривошипа;
lOA – довжина кривошипа.
За векторними рівняннями будуємо плани швидкостей:
![]() ,
,
де
![]() – вектор абсолютної швидкості точки
B, направлений паралельно до осі ординат
(О
y);
– вектор абсолютної швидкості точки
B, направлений паралельно до осі ординат
(О
y);
![]() – вектор абсолютної швидкості точки
А, направлений перпендикулярно до
– вектор абсолютної швидкості точки
А, направлений перпендикулярно до
![]() в бік обертання кривошипа.
в бік обертання кривошипа.
![]() – вектор відносної швидкості точки BА,
направлений перпендикулярно
– вектор відносної швидкості точки BА,
направлений перпендикулярно
![]() .
.
З
врахуванням масштабу швидкості, на
плані швидкостей вектор
![]() будемо зображати відрізком pva:
будемо зображати відрізком pva:
![]() .
.
 Швидкість
точки S2
визначається за формулою:
Швидкість
точки S2
визначається за формулою:
![]() .
.
4.1.5. Побудова планів прискорень
Лінійне прискорення точки А.
![]() ,
,
де
![]() - кутова швидкість кривошипа;
- кутова швидкість кривошипа;
![]() - довжина кривошипа.
- довжина кривошипа.
За векторними рівняннями будуємо плани прискорень для 1-го та 5-го положення механізму:
![]()
де
![]() - вектор абсолютного прискорення точки
B;
- вектор абсолютного прискорення точки
B;
![]() - вектор абсолютного прискорення точки
А;
- вектор абсолютного прискорення точки
А;
![]() - вектор відносного прискорення точки
А3,
направлений перпендикулярно
- вектор відносного прискорення точки
А3,
направлений перпендикулярно
![]() ;
;
![]() - вектор абсолютного нормального
прискорення точки А,
направлений
паралельно
- вектор абсолютного нормального
прискорення точки А,
направлений
паралельно
![]() ;
;
З
врахуванням масштабу прискорень, на
плані прискорень вектор абсолютного
прискорення
![]() будемо зображати відрізком pаa:
будемо зображати відрізком pаa:
![]() .
.
Визначаємо нормальні складові прискорень:
![]() ,
,
![]() .
.
Швидкість точки S2 визначається за формулою:
![]() .
.
 Кутове
прискорення шатуна визначаємо за
формулою:
Кутове
прискорення шатуна визначаємо за
формулою:
![]() ,
,
![]() .
.
Заносимо до таблиці визначені кінематичні параметри механізму
Таблиця 4.1.3
|
Значення швидкостей |
№ положення |
|||||||
|
0 (8) |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
|
|
0 |
0,015 |
0,058 |
0,107 |
0,130 |
0,107 |
0,058 |
0,015 |
|
|
0 |
8,3 |
12,7 |
10,5 |
0 |
10,5 |
12,7 |
8,3 |
|
|
13,5 |
9,6 |
0,75 |
9,6 |
13,5 |
9,6 |
0,75 |
9,6 |
|
|
4,7 |
9,4 |
13 |
10,7 |
4,7 |
10,7 |
13 |
9,4 |
|
|
3118 |
1881 |
459,5 |
1887 |
3118 |
1887 |
459,5 |
1881 |
|
|
- |
2040,5 |
- |
- |
- |
2043,2 |
- |
- |
|
|
4,38 |
3,12 |
0,24 |
3,12 |
4,38 |
3,12 |
0,24 |
3,12 |