

ТММ / Кінематика 8 схеми
.doc1. ВСТУП
Курсовий проект на тему “Двигун внутрішнього згоряння ” виконано по варіанту 08.__, який розроблено на кафедрі ДМ та ПМ і видано до проектування "04" вересня 2014 року.
2. ПРИЗНАЧЕННЯ ТА ГАЛУЗЬ ЗАСТОСУВАННЯ
Кривошипно-повзунний механізм 1-2-3 двигуна перетворює зворотньо - поступальний рух поршня у обертальний рух кривошипа. Передача руху від поршня до кривошипа через шатун. Цикл руху поршня включає такт розширення та такт стиску. На кривошипі закріплений кулачок, плоский штовхач якого приводе в дію діафрагму паливного насосу, який подає паливо до форсунок циліндра.
Передача руху на ведучі колеса здійснюється через коробку передач на редуктор заднього моста. Коробка передач має зовнішню ступінь та планетарну передачу.
3.Технічна характеристика
Коефіцієнт нерівномірності руху: δ = 1/90
Хід поршня: S = 0,23 м
Максимальне стискання: P = 3,8 МПа
4. РОЗРАХУНКИ, ЩО ПІДТВЕРДЖУЮТЬ РОБОТОСПРОМОЖНІСТЬ КОНСТРУКЦІЇ
4.1 Кінематичний аналіз двигуна внутрішнього згорання
Вихідні дані:
Швидкість поршня Vср = 6,8 м/с
Відношення λ = 0,22
Хід поршня S = 0,13 м
4.1.1. Структурний аналіз механізму
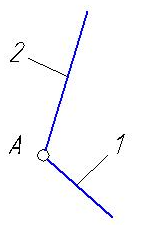
Основою виконуючого механізму двигуна внутрішнього згорання є трьох-ланковий кривошипно-повзунний механізм (рис. 1.)
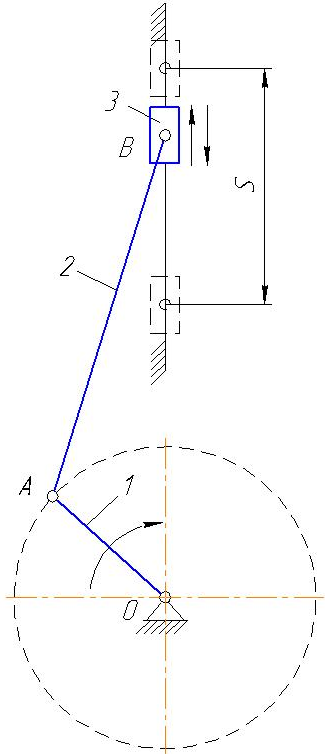
Рис. 1. Кінематична схема механізму двигуна внутрішнього згорання
Механізм має 4 ланки. Одну нерухому (стояк) та 3 рухомих (рис. 1., табл.4.1.1).
Таблиця 4.1.1
Таблиця рухомих ланок
|
Позначення |
Умовне зображення |
Назва |
|
1 |
|
Кривошип |
|
2 |
|
Шатун |
|
3 |
|
Повзун |

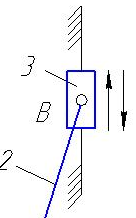
Ланки складають сім нижчих кінематичних пар V-го класу.
Таблиця 4.1.2
Таблиця кінематичних пар
|
Позначення |
Умовне зображення |
Клас |
Назва |
|
О1 (0; 1) |
|
V |
Нижча обертальна |
|
A (1; 2) |
|
V |
Нижча обертальна |
|
B (2; 3) |
|
V |
Нижча обертальна |
|
B (3; 0) |
V |
Нижча поступальна |
Визначаємо ступінь рухомості механізму за формулою Чебишева:
W = 3 × n – 2 × p5 – p4,
де n – кількість рухомих ланок механізму;
p5., p4 – кількість кінематичних пар відповідного класу.
W = 3 × 3 – 2 × 4 – 0 = 9 – 8 = 1.
Розбиваємо механізм на групи Ассура і класифікуємо їх.

Формула будови механізму має вигляд:
I(0-1)®II(2-3)
Механізм відноситься до II класу.
4.1.2. Синтез механізму
Задачею геометричного синтезу механізму є визначення невідомих лінійних параметрів або координат нерухомих точок.
Визначаємо: число обертів кривошипа:
![]()
Радіус кривошипа:
![]()
Довжина шатуна:
![]()
Побудову механізму ведемо методом засічок, при цьому масштабний коефіцієнт довжини приймаємо:
![]() .
.
4.1.3. Побудова графіків переміщення, швидкостей та прискорень т. В
Для
побудови графіків переміщення, швидкостей
та прискорень т. В,
яка
належить повзуну, на осі абсцис відкладаємо
відрізок L,
мм,
що в масштабі
![]() буде часом одного повного оберту
кривошипа.
буде часом одного повного оберту
кривошипа.
![]() масштаб
часу, с/мм
масштаб
часу, с/мм
де
n1
– частота обертання кривошипа,
![]()
![]() с/мм.
с/мм.
Поділимо
відрізок L
на
8 рівних частин і в точках поділу 0, 1, 2 …
8 відкладаємо вздовж осі ординат відрізки
0-1,0-2,0-3,0-4, які в масштабі
![]() (
(![]() )
зображають переміщення повзуна В
від крайнього лівого положення В0
1/8 оберту кривошипа. Сполучивши отримані
точки, дістанемо графік пройдених шляхів
SB
= SB(t).
)
зображають переміщення повзуна В
від крайнього лівого положення В0
1/8 оберту кривошипа. Сполучивши отримані
точки, дістанемо графік пройдених шляхів
SB
= SB(t).
Для побудови графіка швидкостей використовуємо метод графічного диференціювання. Для цього з’єднуємо хордами O1/, 1/2/..7/8 відповідні інтервали на графіку переміщень. Вибираємо полюсну відстань Н1 на продовженні осі абсцис із точки О1, проводимо промені паралельно відповідним хордам до перетину з віссю ординат. Із отриманих точок проводимо лінії паралельні осі абсцис. З’єднавши всі точки отримаємо графік швидкостей точки В. Масштаби графіка визначаємо за формулою:
![]() .
.
Аналогічно будуємо графік прискорень з графіка швидкостей, використовуючи метод графічного диференціювання. Масштаб графіка прискорень визначаємо за формулою:
![]()
4.1.4. Побудова планів швидкостей
Кутова швидкість кривошипа:
![]()
де n1 - частота обертів кривошипа.
Знайшовши кутову швидкість, шукаємо лінійну швидкість точки А, яка належить кривошипу.
Лінійна швидкість точки А:
![]()
де
![]() – кутова швидкість кривошипа;
– кутова швидкість кривошипа;
lOA – довжина кривошипа.
За векторними рівняннями будуємо плани швидкостей:
![]() ,
,
де
![]() – вектор абсолютної швидкості точки
B,
направлений паралельно до осі ординат
(
– вектор абсолютної швидкості точки
B,
направлений паралельно до осі ординат
(![]() ||
Oy);
||
Oy);
![]() – вектор абсолютної швидкості точки
А,
направлений перпендикулярно до
– вектор абсолютної швидкості точки
А,
направлений перпендикулярно до
![]() в бік обертання кривошипа
(
в бік обертання кривошипа
(![]() ┴
OA).
┴
OA).
![]() – вектор відносної швидкості точки BА,
направлений перпендикулярно
– вектор відносної швидкості точки BА,
направлений перпендикулярно
![]() (
(![]() ┴
AB).
┴
AB).
З
врахуванням масштабу швидкості, на
плані швидкостей вектор
![]() будемо зображати відрізком pva:
будемо зображати відрізком pva:
![]() .
.
Швидкість точки S2 визначається за формулою:
![]() .
.
4.1.5. Побудова планів прискорень
Лінійне прискорення точки А.
![]() ,
,
де
![]() - кутова швидкість кривошипа;
- кутова швидкість кривошипа;
![]() - довжина кривошипа.
- довжина кривошипа.
За векторними рівняннями будуємо плани прискорень для 1-го та 5-го положення механізму:
![]()
де
![]() - вектор абсолютного прискорення точки
B;
- вектор абсолютного прискорення точки
B;
![]() - вектор абсолютного прискорення точки
А;
- вектор абсолютного прискорення точки
А;
![]() - вектор відносного прискорення точки
А3,
направлений
перпендикулярно
- вектор відносного прискорення точки
А3,
направлений
перпендикулярно
![]() ;
;
![]() - вектор абсолютного нормального
прискорення точки А,
направлений
паралельно
- вектор абсолютного нормального
прискорення точки А,
направлений
паралельно
![]() ;
;
З
врахуванням масштабу прискорень, на
плані прискорень вектор абсолютного
прискорення
![]() будемо зображати відрізком pаa:
будемо зображати відрізком pаa:
![]() .
.
Визначаємо нормальні складові прискорень:
![]() ,
,
![]() .
.
Швидкість точки S2 визначається за формулою:
![]() .
.
Кутове прискорення шатуна визначаємо за формулою:
![]() ,
,
![]() .
.
Заносимо до таблиці визначені кінематичні параметри механізму
Таблиця 4.1.3
|
Значення швидкостей |
№ положення |
|||||||
|
0 (8) |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
|
|
0 |
0,015 |
0,058 |
0,107 |
0,13 |
0,107 |
0,058 |
0,015 |
|
|
0 |
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
- |
|
- |
- |
- |
|
- |
- |
|
|
|
|
|
|
|
|
|
|