

47
сле разделения переменных к интегралу ∫(y4 +C1 )−1/ 2 dy от так
называемого дифференциального бинома [15], который в данном случае вообще не выражается через элементарные функции.
В качестве практического примера применения метода понижения порядка рассмотрим задачу об осесимметричном изгибе упругих круговых пластин.
2.1.1. Осесимметричный изгиб круговой пластины
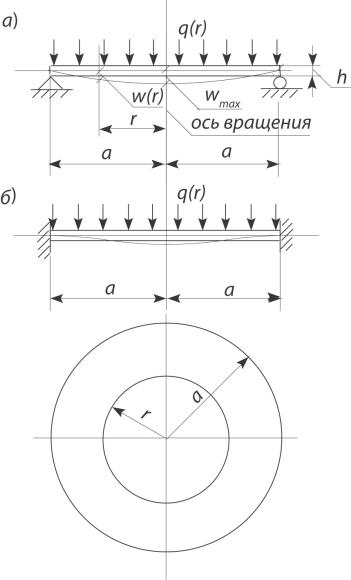
Пусть тонкая упругая круговая пластина радиуса a и толщиной h нагружена внешним равномерно распределëнным давлением (рис. I.6). Случай а) соответствует свободному опиранию на внешнем контуре, случай б) – жëсткому защемлению.
Рис. I.6

48
Как известно, дифференциальное уравнение осесимметричного изгиба тонкой упругой круговой пластины может быть записано в виде [17, 21]
1 d |
|
d 1 d |
|
dw |
|
q |
|
|
|||
|
|
r |
|
|
|
r |
|
= |
|
, |
(2.32) |
|
|
|
|
D |
|||||||
r dr |
dr r dr |
dr |
|
|
|
||||||
где
w-прогиб пластины, r - текущий радиус, q - интенсивность внеш-
него поперечного давления, |
D -цилиндрическая жëсткость пл а- |
||||
стины, равная D = |
|
Eh3 |
|
(E,µ-соответственно модуль упру- |
|
12(1− µ2) |
|||||
|
|
||||
гости и коэффициент Пуассона8 материала пластины). Уравнение (2.32) представляет собой неоднородное линей-
ное дифференциальное уравнение 4-го порядка с переменными коэффициентами и может быть проинтегрировано методом понижения порядка.
Действительно, последовательно интегрируя уравнение
|
|
|
|
|
|
|
|
|
|
|
|
d |
|
|
d 1 |
d |
dw |
|
qr |
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
|
|
|
|
|
|
r |
|
|
= |
|
, |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dr |
|
|
|
D |
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
dr |
r dr |
dr |
|
|
|
|
|
|
|
|
|||||||||||||||
получим после первого интегрирования: |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
d |
1 d |
|
dw |
∫ |
qr |
|
|
|
|
|
|
|
|
|
|
d |
1 d |
dw |
|
1 |
|
∫qrdr + |
a |
|
||||||||||||
r |
|
|
|
r |
|
= |
|
|
dr + a , |
|
|
|
|
|
|
r |
|
|
= |
|
|
|
. |
||||||||||||||
|
|
D |
|
|
|
|
|
|
Dr |
r |
|||||||||||||||||||||||||||
|
dr r dr |
dr |
|
|
|
|
|
|
|
|
|
|
|
dr r dr |
dr |
|
|
|
|||||||||||||||||||
Повторное интегрирование даëт |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
1 d |
|
dw |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
r |
|
|
|
|
= |
∫ |
|
|
∫qrdr dr + a ln r +b, |
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
Dr |
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
r dr |
|
dr |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
d |
dw |
|
|
|
r |
|
dr |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
r |
|
|
|
= |
|
|
|
∫ |
∫qrdr dr + ar ln r +br. |
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
D |
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
dr |
dr |
|
|
|
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
Интегрируя третий раз и учитывая, что ∫r ln rdr = |
r2 |
|
1 |
|
2 |
ln r − |
2 |
, |
|
|
|
|
8 П у а с с о н Симеон Дени (21.06.1781 – 25.04.1840) – французский математик, механик и физик.

|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
49 |
|
|
|
|
|
|
|
|
|
|
|
|
|
получим |
dw |
|
|
r |
|
dr |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
r |
dr |
= |
∫ |
|
|
∫ |
r |
∫qrdr dr + a∫r ln rdr +b∫rdr +c, |
||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||
|
|
|
D |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
dw |
|
1 |
|
∫rdr |
∫ |
dr |
∫qrdr + |
ar |
|
|
1 |
|
br |
|
c |
|
|||||||||||||
|
|
|
= |
|
|
|
|
|
|
|
ln r − |
|
+ |
|
|
+ |
|
. |
||||||||||||
|
dr |
|
Dr |
|
r |
|
2 |
2 |
r |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
||||||||||
Интегрируя это уравнение первого порядка, находим |
||||||||||||||||||||||||||||||
w = |
1 |
∫dr |
∫rdr∫dr |
∫qrdr + |
ar2 |
ln r + r2 |
b −a |
+c ln r + d. |
||||||||||||||||||||||
D |
|
|
||||||||||||||||||||||||||||
|
|
|
|
r |
|
|
|
|
|
r |
|
|
|
|
|
|
4 |
|
|
|
|
4 |
|
|
|
|
|
|||
Заменяя постоянные интегрирования |
|
a,b,c,d новыми по- |
||||||||||||||||||||||||||||
стоянными: |
C = d, |
|
C |
2 |
= |
b −a |
, |
C |
3 |
= c, C |
4 |
|
= a , |
получим окон- |
||||||||||||||||
|
|
|
||||||||||||||||||||||||||||
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
чательное выражение для общего решения в принятой в теории пластин форме
w = C +C r2 +C |
|
ln r +C r2 ln r + |
1 |
|
dr |
|
rdr |
|
dr |
|
qrdr. (2.33) |
|
|
D ∫ |
r |
∫ |
∫ |
r |
∫ |
||||||
1 |
2 |
3 |
4 |
|
|
|||||||
|
|
|
|
|
|
|
|
|
||||
Если внешнее поперечное давление |
q = const, |
то последнее |
||||||||||
слагаемое в формуле (2.33), представляющее собой частное решение неоднородного уравнения (2.32), приводится к виду
Dq ∫drr ∫rdr∫drr ∫rdr = Dq ∫drr ∫rdr∫2r dr = Dq ∫drr ∫r43 dr =
= |
q |
∫r3 |
dr = |
qr4 |
. |
4D |
|
||||
|
4 |
|
64D |
||
Окончательно прогиб круговой пластины, нагруженной равномерно распределëнным поперечным давлением, будет равен
w = C +C |
r2 +C |
ln r +C |
r2 ln r + |
qr4 |
. |
(2.34) |
|
|
|||||||
1 |
2 |
3 |
4 |
|
64D |
|
|
|
|
|
|
|
|
||
Можно показать, что внутренние силовые факторы: радиальный изгибающий момент M r и поперечная сила Qr выражают-
ся через прогиб по формулам [17, 21]:
|
|
|
|
2 |
w |
|
µ dw |
|
|
|
d |
|
|
2 |
w |
|
|
|
||
M |
r |
− D d |
|
+ |
, |
Q |
= D |
d |
|
+ 1 dw |
. |
(2.35) |
||||||||
|
|
2 |
|
|
|
|
2 |
|||||||||||||
|
|
dr |
|
r dr |
|
r |
|
|
|
dr |
r dr |
|
|
|||||||
|
|
|
|
|
|
|
|
dr |
|
|
|
|||||||||
50
С учетом (2.34) выражения (2.35) приводятся к виду
|
|
|
|
|
|
1 |
|
|
|
|
|
|
M r = −D 2(1+ µ)C2 |
−(1− µ)C3 |
|
|
|
+C4[3 + µ + 2(1+ µ)ln r] + |
|||||||
r |
2 |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
(2.36) |
||
|
3 + µ |
|
|
|
|
|
1 |
|
qr |
|
||
|
qr |
2 |
Qr = 4C4 D |
|
|
|
||||||
+ |
|
|
, |
|
|
+ |
|
. |
|
|||
16D |
|
r |
2 |
|
||||||||
|
|
|
|
|
|
|
|
|
||||
Произвольные постоянные, входящие в общее решение |
||||||||||||
(2.34), определяются далее из граничных условий. |
|
|||||||||||
А) В случае свободного опирания при r = a |
прогиб и ради- |
|||||||||||
альный изгибающий момент равны нулю: |
|
|||||||||||
|
|
|
|
|
w = M r |
= 0. |
(2.37) |
|||||
Ещë два условия для определения произвольных постоянных следуют из рассмотрения условий в центре пластины (при
r = 0).
Во-первых, из условия ограниченности прогиба в центре необходимо принять
C3 = 0 |
(2.38) |
(так как при r → 0 ln r неограниченно возрастает, а прогиб w r=0
должен быть конечной величиной).
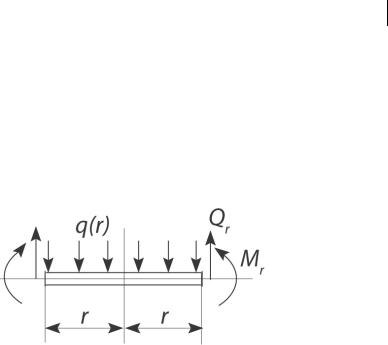
Во-вторых, выделяя из пластинки круг малого радиуса r и заменяя действие отброшенной части внутренними силовыми факторами – изгибающим моментом и поперечной силой, равномерно распределëнными по контуру сечения, из условия равновесия выделенной части пластины (см. рис. I.7) получим формулу для Qr :
Рис. I.7 |
|
= qr . |
|
|
2πrQ =πr2q , |
|
Q |
(2.39) |
|
r |
|
r |
2 |
|
Приравнивая выражения (2.36) и (2.39), находим
C4 = 0. |
(2.40) |
51
С учетом (2.38), (2.40) выражения (2.34) и (2.36) примут вид
w = C1 +C2r |
2 |
+ |
qr4 |
. |
|
|
|
3 + µ |
|
2 |
|
|
|
M r = −D 2(1 |
+ µ)C2 |
+ |
|
qr |
|
, |
|||
|
64D |
16D |
|
||||||||
|
|
|
|
|
|
|
|
|
|
Теперь из граничных условий на внешнем контуре пластины получим систему уравнений для определения постоянных интегрирования C1 и C2 :
C |
+C |
a2 |
+ |
qa4 |
|
= 0, |
|
|
||||
|
|
|
|
|||||||||
|
1 |
2 |
|
|
|
64D |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
3 + |
µ |
|
|
|
||
|
|
|
|
|
+ |
qa |
2 |
= 0, |
||||
2(1+ µ)C2 |
16D |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|||
из которой следует |
|
5+ µ qa4 |
|
|
|
|
|
|
3 + µ qa2 |
|
|
|||||||||
C |
= |
, |
C |
|
= − |
. |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
1+ µ 64D |
|
1+ µ |
|
32D |
|
|||||||||||||||
1 |
|
|
|
|
2 |
|
|
|
|
|
||||||||||
Поэтому прогиб в произвольной точке свободноëртойоп |
||||||||||||||||||||
круговой пластины будет определяться формулой |
|
|
||||||||||||||||||
|
|
|
5 |
+ µ |
|
3 + µ r |
2 |
|
r |
4 |
|
qa4 |
|
|||||||
w(r) = |
|
|
|
−2 |
|
|
|
|
|
+ |
|
|
|
|
|
, |
||||
1 |
+ µ |
1 |
|
|
|
64D |
||||||||||||||
|
|
|
|
+ µ a |
|
|
a |
|
|
|
||||||||||
а его максимальное значение в центре пластины (при r = 0) равно
w |
= |
5+ µ |
|
qa4 |
= 0,696 |
qa4 |
(при µ = 0,3). |
|
|
|
|||||
max |
|
1+ µ |
|
64D |
|
Eh3 |
|
|
|
|
|
|
Б) Для жестко защемлëнной по внешнему контуру круговой пластины условия в центре, очевидно, будут такими же, как и для свободно опëртой пластины, а на внешнем контуре должны быть равны нулю прогиб и угол поворота сечения:
w = dw |
= 0 |
при r = a. |
||||
dr |
|
|
|
|
|
|
Поэтому, по-прежнему, C3 = C4 |
= 0, а для определения C1 и |
|||||
C2 получаем систему уравнений |
|
|
|
|
|
|
C +C |
a2 + |
qa4 |
= 0, |
|||
|
||||||
1 |
2 |
|
|
|
64D |
|
|
|
|
|
|
|
|
|
|
|
qa3 |
|
|
|
|
|
|
|
|
|
|
2C2a |
+ |
|
|
|
= 0, |
|
16D |
|
|||||
|
|
|
|
|||
52
из которой находим
C |
= |
qa4 |
, C |
|
= − |
qa2 |
. |
64D |
|
32D |
|||||
1 |
|
|
2 |
|
|
В результате зависимость прогиба защемлëнной пластины от радиуса будет определяться выражением
|
r 2 |
|
qa4 |
|
||
w(r) = 1 |
− |
|
|
|
|
, |
|
64D |
|||||
|
a |
|
|
|||
а максимальное значение прогиба в центре пластины будет равно
w |
= |
qa4 |
= 0,171 |
qa4 |
(при µ = 0,3). |
|
64D |
Eh3 |
|||||
max |
|
|
|
2.2. Линейные однородные дифференциальные уравнения n-го порядка. Общие свойства решений
Линейным дифференциальным уравнением n - го порядка называется уравнение
y(n) + a1 (x)y(n−1) + a2(x)y(n−2) + + an−1 (x)y′+ an (x)y = f (x), (2.41)
содержащее неизвестную функцию и все её производные до n-го порядка включительно в первой степени. Если все коэффициенты уравнения постоянны: ai = const (i =1,2,...,n), то оно называется
линейным дифференциальным уравнением с постоянными коэффициентами. Если хотя бы один из коэффициентов ai является
функцией от x, то уравнение (2.41) будет уравнением с переменными коэффициентами.
Если правая часть уравнения f (x) ≡ 0, то уравнение (2.41) принимает вид
y(n) + a1 y(n−1) + a2 y(n−2) + + an−1 y′+ an y = 0,
и называется линейным однородным дифференциальным уравнением, в противном случае – линейным неоднородным.
Левая часть уравнения (2.41) называется линейным диф-
ференциальным оператором и обозначается через
Ln (y) = y(n) + a1 y(n−1) + a2 y(n−2) + + an−1 y′+ an y. |
(2.42) |
53
С учетом обозначения (2.42) линейное однородное дифференциальное уравнение n - го порядка может быть записано в компактной форме:
Ln (y) = 0. |
(2.43) |
Свойства оператора Ln (y).
1. Ln (Cy) = CLn (y), где C – некоторое число. Это свойство назы-
вают свойством однородности оператора.
2. Ln (y1 + y2) = Ln (y1 )+ Ln (y2) - это свойство называют свойством
аддитивности оператора.
|
n |
|
n |
3. Ln |
∑Ck yk |
= ∑Ck Ln (yk ), то есть оператор, взятый от линей- |
|
k=1 |
|
k=1 |
|
ной комбинации функций, равен линейной комбинации операторов, взятых от этих функций (напомним, что линейной комбинацией функций называется сумма произведений функций на различные постоянные числа, то есть выражение вида С1 y1 +C2 y2 + +Cn yn ).
Используя свойства оператора Ln (y), легко показать, что
справедливы следующие свойства решений линейного однородного дифференциального уравнения:
1. Если функция y(x) является решением линейного однородного дифференциального уравнения Ln (y) = 0, то функция Cy(x), где C – произвольная постоянная, также является решением этого уравнения.
2.Если функции y1 (x) и y2(x) являются решениями линейного однородного дифференциального уравнения Ln (y) = 0, то сум-
ма функций y1 (x)+ y2(x) также является решением этого уравнения.
3.Если y1 (x), y2(x), , ym (x)- какие либо частные решения урав-
нения Ln (y) = 0, то любая их линейная комбинация с произ-
m
вольными коэффициентами ∑Ci yi также будет решением
i=1
этого уравнения.
54
Действительно, на основании свойств однородности и аддитивности линейного дифференциального оператора можно записать:
m |
|
= Ln (C1 y1 )+ Ln (C2 y2)+...+ Ln (Cm ym ) = C1Ln (y1 )+ |
Ln ∑Ci yi |
||
i=1 |
|
|
+C2Ln (y2)+...+Cm Ln (ym ).
Так как функции y1 (x), y2(x), , ym (x) являются частными решениями уравнения Ln (y) = 0, то все слагаемые в правой части
|
m |
|
= 0. Сле- |
последнего равенства равны нулю, поэтому Ln |
∑Ci yi |
||
|
i=1 |
|
|
m
довательно, ∑Ci yi также является решением уравнения.
i=1
Последнее свойство называется принципом суперпозиции (наложения) решений линейных однородных дифференциальных уравнений n - го порядка.
Заметим также, что линейное однородное дифференциальное уравнение Ln (y) = 0 всегда имеет тривиальное решение
y ≡ 0.
В теории линейных дифференциальных уравнений важную роль играют понятия линейной независимости и линейной зависимости функций.
Пусть имеется система функций y1 (x), y2(x), , yn (x), определëнных на некотором интервале (a,b), и пусть C1, C2, , Cn - различные действительные числа.
Система функций называется линейно независимой, если линейная комбинация этих функций С1 y1 +C2 y2 + +Cn yn = 0
тогда и только тогда, когда все коэффициенты линейной комбинации C1 = C2 =...= Cn = 0. В противном случае система функций
линейно зависима.
Если система функций линейно зависима, то по крайней мере одна из них является линейной комбинацией других. Если,
например, C1 ≠ 0, то из условия С1 y1 +C2 y2 + +Cn yn = 0 следует