

Курс раб / 14-21
.doc
1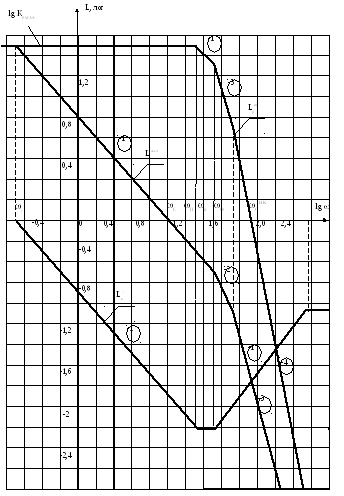 4
4
Рис. 3. К построению ЛАЧХ: некорректированной САУ LРНК,
желаемой LРЖЕЛ и коррекции LК'
15
Тогда согласно (3.4),
|Lв(с)- Lн(с)|=|lg d –2 lg С +lg Ф - 3 - 1| 3 ,
отсюда ![]() .
(3.6)
.
(3.6)
Частота С желаемой ЛАЧХ принимается равной наименьшему из значений, рассчитанных по (3.5) и (3.6). Например, для рис. 3: по (3.5)
lg С 1,7-0,75=0,95; по (3.6) lg С (1,45+1,7-1)/2=1,075.
Выбираем lg С=0,95 (С=100,95=8,91 с-1).
По приведенной выше методике может быть определена частота С и построена желаемая ЛАЧХ LРЖЕЛ() и иной конфигурации.
Динамическая составляющая ЛАЧХ LК!() корректирующего устройства (коэффициент КI учтен в КР МАКС) получается путем вычитания зависимости LРНК() из LРЖЕЛ(), т.е.
LК!()= LРЖЕЛ()-LРНК().
Полная ЛАЧХ корректирующего устройства
LК()=lg К1 + LК!().
В качестве схемотехнической реализации корректирующего устройства может быть рекомендован операционный усилитель, включенный по схеме рис. 4 а. Используя методику, изложенную в первой части задания, нетрудно получить передаточной функции в виде
![]()
![]() .
(3.7)
.
(3.7)
При различных вариациях параметров можно реализовать различные виды коррекции:
-
опережающую (рис. 4 б) – при С3=0;
-
запаздывающую (рис. 4 в) – при С2=0;
-
комбинированные: (рис. 4 г) – при T3>T4>T1>T2;
(рис. 4 д) – при T1>T2>T3>T4.
Постоянные времени числителя передаточной функции (3.7) соответствуют частотам сопряжения аппроксимированной ЛАЧХ LК() с положительным переходом, т.е. наклона с –1 на 0 или с 0 на +1, а знаменатель соответствует частотам сопряжения участков LК() с отрицательным переходом, т.е. с 0 на –1 или с +1 на 0, если следовать по LК() в сторону возрастания частот.
Рассматриваемому примеру соответствует коррекция вида, указанного на рис.4 д. Частота сопряжения 1=1/Т1; 2=1/Т2; 3=1/Т3 и 4=1/Т4 легко получаются, если взять антилогарифм (десятичный) абсцисс, приведенных на рис. 3. По (3.7) можно составить систему пяти уравнений (четыре постоянные и К1=R6/R4 c шестью неизвестными параметрами). Поэтому один из параметров
16

Рис. 4. К расчету корректирующего устройства:
а – принципиальная схема;
б…д – ЛАЧХ при различных параметрах
необходимо определить. Рекомендуется задать значение С2=1 мкФ, а остальные параметры получить из решения системы уравнений.
Для построения по п. 3.5 задания точных ЛАЧХ замкнутой системы удобно преобразовать исходную структурную схему (с уже известной
17
передаточной функцией корректирующего устройства) от вида рис. 5 а к виду рис. 5 б.

Рис. 5. Преобразование исходной структурной схемы
Таким образом, построение ЛЧХ по любому возмущающему воздействию UC или МС сводится к построению ЛЧХ по задающему воздействию UЗАД двух встречно-параллельно соединенных звеньев с передаточными функциями W1(P) и W2(P) и затем последовательно соединенного звена с передаточной функцией WИ(P) и W!М(P).
При построении ЛЧХ звеньев с передаточными функциями W1(P), WИ(P) и W!М(P) следует учитывать, что анализ динамических свойств САУ ведется для отклонений переменных от заданного установившегося режима, т.е. коэффициент передачи тиристорного преобразователя следует брать равным КП ЗАД (см. методические указания к первой части).
Для построения результирующей ЛЧХ встречно-параллельного соединения звеньев можно воспользоваться следующей методикой.
Пусть имеются встречно – параллельно соединенные звенья с передаточной характеристикой прямого канала W1(P) и W2(P) звена отрицательной обратной связи (рис. 6 а). Таким образом, известны АФЧХ прямого канала W1(j)=A1()e j1() и соответственно ЛЧХ – L1() и 1(), АФЧХ обратной связи W2(j)=A2()e j2() и соответственно ЛЧХ – L2() и 2().
18
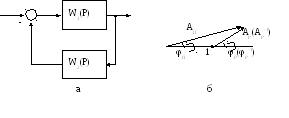

Рис. 6. Структурная схема (а), нахождение поправочного вектора (б) и построение результирующей ЛАЧХ при встречно-параллельном соединении звеньев (в)
19
Введем понятие обратных частотных характеристик звена обратной связи:
-
обратная АЧХ A2-1()=1/ A2();
-
обратная ФЧХ 2-1()=-2();
-
обратная ЛАЧХ L2-1()=-L2(),
т.е. обратные ЛЧХ являются зеркальным отображением прямых ЛЧХ относительно оси абсцисс (оси lg ).
Известно, что передаточная функция встречно-параллельного соединения звеньев с ООС определяется соотношением
![]()
или для частотных характеристик
 .
(3.8)
.
(3.8)
Очевидно, в общем случае в некоторой области частот выполняется условие
AP()=A1()·A2()=A1()/A-12()<1, LP()=L1() + L2()=L1() - L-12()<0.
Тогда L1() < L-12(), т.е. L1() лежит ниже L-12(). Вместо (3.8) можно записать в виде
 ,
,
P()=1() - -12().
Очевидно, что в знаменателе дроби стоит выражение, мало отличающееся от единицы. В оставшейся области частот Ар(ω)=А1(ω)·А2(ω)>1 или
А-1р(ω)=А-12(ω)/А1(ω)<1, т.е. L-12(ω) лежит ниже L1(ω). Тогда (3.8) можно записать в виде
 .
.
При этом вновь в знаменателе дроби стоит выражение, мало отличающееся от единицы.
Т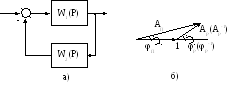 аким
образом, результирующая АФЧХ
встречно-параллельного соединения
звеньев с ООС идет по АФЧХ прямого канала
в области частот, где
аким
образом, результирующая АФЧХ
встречно-параллельного соединения
звеньев с ООС идет по АФЧХ прямого канала
в области частот, где
А1() < А2-1(), и по обратной АФЧХ канала ОС в области частот, где
А2-1()
<
А1(),
c учетом
поправочного коэффициента, равного
![]() в первом случае и
в первом случае и
 во втором.
во втором.
Переходя к ЛЧХ, данное соотношение можно сформулировать следующим образом.
Результирующая ЛЧХ встречно-параллельного соединения звеньев с ООС идет по ЛЧХ прямого канала в области частот, где L1() лежит ниже L2-1(), и
20
по ЛЧХ канала ОС в области частот, где L2-1() лежит ниже L1() за вычетом координат поправок, т.е.
LЗ()=L1()-LП(), З()=1()-П() или
LЗ()=L2-1()-LП(), З()=2-1()-П().
Нахождение поправочного вектора
![]() или
или
![]()
иллюстрируется векторной диаграммой (рис. 6 б).
Для удобства нахождения поправочных координат на рис. 7 приведена номограмма, в которой вместо абсолютных значений АЧХ АР(АР-1) и АП даны их логарифмы, т.е. LР(LР-1) и LП.
Таким образом, для построения результирующей ЛЧХ встречно-парал-лельного соединения звеньев (рис. 6 в) необходимо:
-
построить L1(), 1() прямого канала , L2-1(), 2-1() – канала ОС;
-
определить LР(i)[LР-1(i)],задавая частоту ωi как расстояние между L1(i) и L2-1(i), и определить Р(i) [Р-1(i)] как расстояние между 1(i) и 2-1(i) (рис. 6 в);
-
по LР(i)[LР-1(i)] и Р(i) [Р-1(i)] в номограмме (рис. 7) найти Lп(i) и п(i). Значения LР(LР-1) приведены по по вертикали в центре номограммы; Р(Р-1) – на концах лучей, исходящих из центра нижней оси номограммы; Lп – по левой вертикали и по левому обрезу номограммы на окружностях с центром в левом нижнем углу; п – на концах лучей, исходящих из левого нижнего угла номограммы;
-
значение Lп(i) вычитается от значения L1(i) или L2-1(i), лежащего ниже относительно друг друга, с учётом знака поправки, полученной по номограмме;
-
значение п(i) откладывается от фазы звена, ЛАЧХ (или обратная ЛАЧХ) которого лежит ниже. п(i) откладывается всегда вовнутрь пространства, лежащего между 1(i) и 2-1(i);
-
повторяя построение для других частот аналогично изложенному, находят координаты Lз(i) и з результирующей ЛАЧХ.
Нетрудно заметить, что наибольшие поправки будут в частоте пересечения L1(i) или L2-1(i) – частоте среза замкнутого контура. Действительно, при этой частоте Ар(с)= Ар-1(с), Lр(с)= Lр-1(с)=0 и величина поравки будет полностью определяться фазой р(с). При р(с)=-90 поправки равна 0,15 лог, что соответствует поправке аппроксимированной ЛАЧХ апериодического звена, т.е. в этом случае переходной процесс будет иметь апериодический характер, время регулирования составит в этом случае (3-4)/с. При
р(с)=-120 поправка в частоте с равна нулю – процесс может иметь перерегулирование 5…18% и одно колебание.
21

