

diplom[ishodniki] / До Мигдалёнка / Методы / ЛАБОРАТОРНАЯ РАБОТА №3_3
.pdfЛАБОРАТОРНАЯ РАБОТА № 3.3
ИССЛЕДОВАНИЕ ЭЛЕКТРОМАГНИТНЫХ ПРОЦЕССОВ В ЭЛЕКТРОПРИВОДЕ ПЕ- РЕМЕННОГО ТОКА С АСИНХРОННЫМ ДВИГАТЕЛЕМ ПРИ СКАЛЯРНОМ ЧАС- ТОТНОМ УПРАВЛЕНИИ ПО ЗАКОНУ U/f = const И С IR-КОМПЕНСАЦИЕЙ.
Цель работы: изучение средств имитационного моделирования электропривода перемен- ного тока, а также изучение динамических свойств АД при частотном управлении по за- кону U/f = const и при частотном управлении с IR-компенсацией.
ИСХОДНОЕ МАТЕИАТИЧЕСКОЕ ОПИСАНИЕ.
При частотном управлении необходимо задавать величину частоты, пропорцио- нальной требуемому значению скорости ротора, а амплитуду формировать в соответствии с требуемым законом частотного управления.
Закон управления U/f=const позволяет обеспечить приблизительное постоянство модуля потокосцепления ротора. Этот закон обеспечивает регулирование скорости вниз от номинальной с постоянством момента. В соответствии с этим законом амплитуда на- пряжения вычисляется по выражению:
U т |
= |
U тн |
ω о |
|
|
ω |
|||
|
|
|
|
|
|
|
|
он |
|
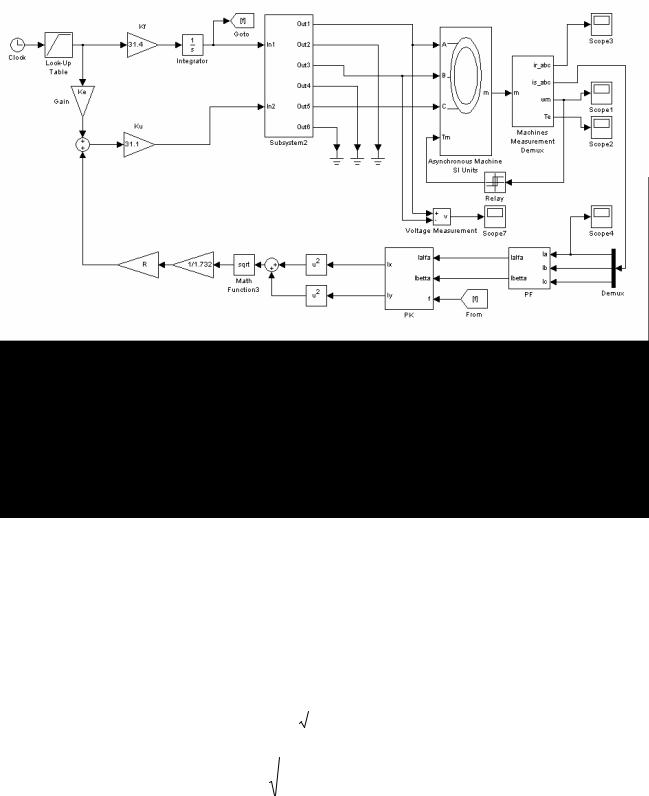
Структурная схема для моделирования системы ПЧ-АД представлена на рисунке 1.
|
ЗИ |
Крч |
|
Out1 |
|
|
|
Asynchronous Machine |
|
|
|
|
|
|
|
|
|
SI Units |
|
|
|||
|
|
|
|
|
|
|
|
|
|||
|
Uзс |
|
w0 |
|
|
|
|
Ua |
Bus Bar (vert) |
|
|
|
-K- |
|
|
|
|
|
|
|
|||
|
|
In1 |
Out2 |
|
+ |
|
A |
a |
|
|
|
Clock1 |
|
|
|
|
|
V |
|
|
|
|
|
Look-Up |
Gain |
|
|
|
- |
|
|
|
|
|
|
|
|
|
Product |
|
|
|
|
|
|
||
|
Table1 |
|
|
Out3 |
|
|
Ub |
|
|
|
|
|
|
|
|
|
|
|
|
Demux |
|||
|
|
|
|
|
|
+ |
|
B |
b |
|
|
|
|
|
Преобразователь |
|
V |
|
|
|
|
|
|
|
|
|
|
- |
|
|
|
|
|
||
|
|
|
|
частоты |
Product1 |
|
|
Uc |
|
is_abc |
Demux Scope5 |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
+ |
|
C |
c |
|
|
|
|
|
|
|
|
V |
|
|
|
|
|
|
|
|
|
|
|
- |
|
|
|
|
w |
|
|
|
|
|
Product2 |
Controlled |
|
|
m |
wm |
|
|
|
|
|
|
|
|
|
||||
|
|
Крн |
|
|
|
Voltage Source2 |
|
Tm |
m_SI |
|
M |
|
|
|
|
|
|
|
|
|
|
|
Scope2 |
|
|
|
Uпmax |
|
|
|
|
|
|
Te |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
-K- |
|
|
|
|
|
Mc |
|
|
Scope3 |
|
|
Gain2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+ |
v |
|
Relay |
|
|
|
|
|
|
|
|
- |
|
|
|
||
|
|
|
|
|
|
|
|
Scope |
|
|
|
Рисунок 1 – Структурная схема модели системы ПЧ-АД при частотном управлении по за-
кону U/f = const.
Значения коэффициентов регуляторов напряжения и частоты определяются из следующих выражений
K рч = 2 π fном
U зч. max
K рн =

 2 U фном
2 U фном
U зч.max
При частотном управлении с IR-компенсацией вводится обратная связь по току двигателя для компенсации падения напряжения на активном сопротивлении статора. Структурная схема модели при данном законе частотного управления представлена на рисунке 2
Рисунок 2 – Структурная схема модели при частотном управлении с IR-компенсацией. Действующее значение тока двигателя определяется на основании фазных и координат- ных преобразований в блоках PF и PK. Преобразования выполняются в соответствии со следующими выражениями:
- преобразование и трёхфазной системы координат в двухфазную
i1α |
= kc |
3 |
|
i1a |
|||||
2 |
|
||||||||
i1β = kc |
|
3 |
(i1b − i1c ) |
||||||
|
|||||||||
|
|
|
|
|
2 |
|
|||
kc |
= |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
3 |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
- преобразование из неподвижной системы координат во вращающуюся систему коорди- |
|||||||||
нат |
|
|
|
|
|
|
|
|
|
i1x = i1α cosϕ+ i1β sin ϕ i1y = −i1α sin ϕ+ i1β cosϕ
Действующее значение тока определяется из выражения:
I = |
1 |
|
i |
2 +i 2 |
|
|
|
||||
3 |
|
1x |
1y |
||
Коэффициент функционального преобразователя ke определяется из выражения:
ke = |
Eном |
= |
U ном − Iном R1 |
||
U зч.макс |
|
10 |
|||
|
|
||||
ПОРЯДОК ВЫПОЛНЕНИЯ РАБОТЫ.
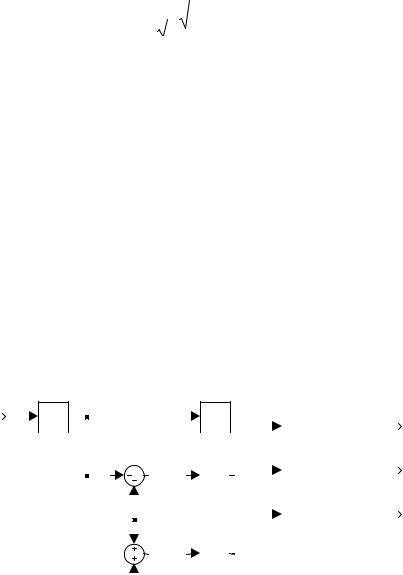
1.Собрать структурную схему для моделирования электропривода переменного тока по системе ПЧ-АД при частотном управлении по закону U/f = const (Рисунок 1). В каче- стве модели асинхронного двигателя взять готовый блок из библиотеки Power System Blockset раздел Machines. Преобразователь частоты реализовать на релейных элемен- тах по схеме в соответствии с рисунком 3. Для разделения выходных сигналов двига- теля использовать блок ASM Measurement Demux.
w0
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
sin |
|
|
|
|
|
|
|
|
|
|
|
|
s |
|
|
|
|
|
|
|
|
|
|
|
|
|
Uu1 |
Ua |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Integrator |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Uu2 |
Ub |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
sin |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Uu3 |
Uc |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2*pi/3 |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Constant1 |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Широтно-импульсный |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
sin |
|
|
преобразователь |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рисунок 3 – Структурная схема преобразователя частоты.
2.Выполнить моделирование пуска двигателя при линейном задании скорости с ограни- чением тока якоря на уровне 2,5*Iн для вариантов:
a)Статический момент равен номинальному моменту двигателя Мс = Мном, момент инерции равен Jн = 1,7*Jд;
b)С увеличенным и уменьшенным статическим моментом (Мс1 = 2*Мном, Мс2 = 0,2*Мном)
c)С увеличенным моментом инерции (J = 2*Jн).
3.Собрать структурную схему для моделирования электропривода переменного тока по системе ПЧ-АД при частотном управлении с IR-компенсацией (рисунок 2). Выполнить
моделирование пуска двигателя при линейном задании скорости для случаев из пункта
2.
ИСХОДНЫЕ ДАННЫЕ ДЛЯ МОДЕЛИРОВАНИЯ
|
Данные |
|
Рн, |
|
Uн, |
|
КПД, |
|
cos |
|
f, |
|
Статор |
|
Ротор |
|
L, |
|
|
J, |
|
pп |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
Вари- |
|
кВт |
|
В |
|
% |
|
ϕ |
|
Гц |
|
|
|
|
|
|
|
|
|
Гн |
|
|
кг |
|
|
|
|
|
|
|
|
|
R1, |
|
L1σ, |
|
R2, |
|
L2σ, |
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
анты |
|
|
|
|
|
|
|
|
|
|
|
Ом |
|
Гн |
|
Ом |
|
Гн |
|
|
|
|
м2 |
|
|
|
|
1 |
|
0,25 |
|
380 |
|
68 |
|
0,77 |
|
50 |
|
6,1 |
|
0,0915 |
|
13,1 |
|
0,0915 |
|
3,65 |
|
0,01 |
|
1 |
|
|
|
2 |
|
0,55 |
|
380 |
|
73 |
|
0,86 |
|
50 |
|
21,3 |
|
0,002 |
|
14,7 |
|
0,002 |
|
0,83 |
|
0,02 |
|
1 |
|
|
|
3 |
|
1,0 |
|
380 |
|
80 |
|
0,9 |
|
50 |
|
7,2 |
|
0,008 |
|
6,73 |
|
0,008 |
|
0,4 |
|
0,02 |
|
3 |
|
|
|
4 |
|
3,0 |
|
380 |
|
84,5 |
|
0,88 |
|
50 |
|
0,38 |
|
0,00084 |
|
1,8 |
|
0,00084 |
|
0,4 |
|
0,1 |
|
1 |
|
|
|
5 |
|
5,5 |
|
380 |
|
87,5 |
|
0,91 |
|
50 |
|
0,065 |
|
0,001 |
|
0,635 |
|
0,001 |
|
0,3 |
|
|
0,1 |
|
1 |
|
|
6 |
|
11 |
|
380 |
|
88 |
|
0,9 |
|
50 |
|
0,005 |
|
0,002 |
|
2,4 |
|
0,002 |
|
0,19 |
|
|
0,2 |
|
1 |
|
1.Цель работы. СОДЕРЖАНИЕ ОТЧЁТА
2.Описание модели, реализованной в системе структурного моделирования Simulink.
3.Зависимости i(t), М(t), ω(t), ω(M) для каждого случая моделирования.
4.Анализ влияния изменяемых параметров и ШИМ модуляции на динамические харак- теристики электропривода.