

diplom[ishodniki] / До Мигдалёнка / Методы / ЛАБОРАТОРНАЯ РАБОТА_3_2
.pdfЛАБОРАТОРНАЯ РАБОТА № 3.2
ИССЛЕДОВАНИЕ ЭЛЕКТРОМАГНИТНЫХ ПРОЦЕССОВ В ЭЛЕКТРОПРИВОДЕ ПОСТОЯННОГО ТОКА С ДВИГАТЕЛЕМ ПОСЛЕДОВАТЕЛЬНОГО ВОЗБУЖДЕ- НИЯ И ШИРОТНО-ИМПУЛЬСНЫМ ПРЕОБРАЗОВАТЕЛЕМ.
Цель работы: определение рациональных законов управления ключами широтно- импульсных преобразователей (ШИП), применяемых в электроприводах с двигателями постоянного тока (ДПТ), освоение методов исследования динамических характеристик электроприводов с учетом реальной формы токов и э.д.с.
Исходное математическое описание.
Двигатель постоянного тока последовательного возбуждения описывается сле- дующей системой уравнений:
0 = iвт Rвт + ωвт |
dФ |
|
|
|
|
|
||
|
|
|
|
|||||
|
dt |
|
|
|
|
dФ |
|
|
uя = k Ф ω + iя RяΣ |
+ Lя |
diя |
+ ωв |
(1) |
||||
dt |
dt |
|||||||
|
|
|
|
|
|
|||
M = kФiя
RяΣ = Rя + Rв
Для составления структурной схемы система уравнений (1) преобразовывается к следующему виду:
|
RяΣ TвΣ |
|
dФ |
= uя − e − RяΣ Tя |
|
diя |
− |
RяΣ |
Ф |
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
kф |
|
|
|
dt |
|
|
|
|
|
dt |
|
|
kф |
|
|
|
|
||||||||
|
RяΣ Tя |
|
diя |
= uя − e − |
RяΣ Tв |
|
dФ |
− RяΣ |
|
|
|
(2) |
||||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
dt |
kф |
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
||||||
|
M = kФiя |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
где: TвΣ – |
суммарная постоянная времени обмоток возбуждения: |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
ω |
|
|
|
|
|
ω |
в |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
T |
= |
|
вт + |
|
|
|
|
k |
|
= T |
+ T |
≈ (1,1 ÷ 1,2) T |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
вΣ |
|
Rвт |
|
|
|
RяΣ |
|
|
ф |
вт |
в |
в |
||||||
Тв – постоянная времени обмотки возбуждения:
|
T |
= |
ωв |
k |
|
|
RяΣ |
|
|||
|
в |
|
|
фн |
|
ωв – |
количество витков обмотки возбуждения. |
||||
kфн – |
коэффициент намагничивания в номинальной точке: kфн = Фном/Iном; |
||||
Тя – постоянная времени цепи якоря; Тя = Lя/RяΣ. Индуктивность обмотки якоря определяется из выражения:
|
Lя = βk |
|
U ном |
; |
|
p ω ном Iном |
|||
|
|
|
|
|
где: βк – |
коэффициент, равный 0,25. |
|
||
р – |
число пар полюсов. |
|
|
|
Конструктивная постоянная двигателя определяется по формуле:
pN k = 2πa .
Коэффициент намагничивания kф является функцией тока якоря и имеет нели- нейную зависимость.
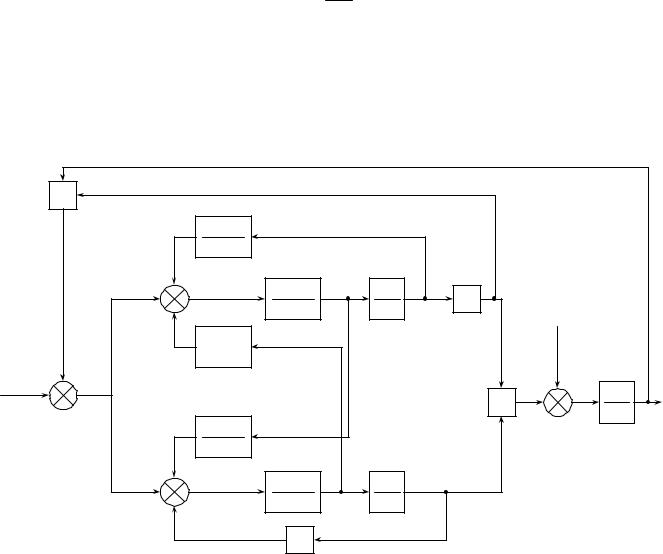
На основании системы уравнений (2) может быть получена следующая структурная схема.
X |
|
|
|
|
|
|
|
|
|
RЯΣ |
|
|
|
|
|
|
|
КФ |
|
|
|
|
|
|
- |
КФ |
|
|
|
|
|
|
|
1 |
|
К |
|
|
|
|
|
RЯΣТВΣ |
р |
Ф |
|
|
|
|
- |
|
|
|
|||
|
RЯΣТЯ |
|
|
|
Mc |
|
|
e |
|
|
|
|
|
||
- |
|
|
|
|
M |
- |
|
UЯ |
|
|
|
|
|
||
|
|
|
|
|
1 |
|
|
|
|
|
|
|
X |
|
|
|
|
|
|
|
Jр |
ω |
|
|
|
RЯΣТВ |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
КФ |
|
|
|
|
|
|
- |
|
|
iЯ |
|
|
|
|
|
1 |
1 |
|
|
|
|
|
|
|
|
|
|
||
|
- |
RЯΣТЯ |
р |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
RЯΣ |
|
|
|
|
|
Рисунок 1 – |
Структурная схема двигателя последовательного возбуждения. |
|
|
||||
Порядок выполнения работы.
1.Используя исходные двигателей рассчитать параметры структурной схемы для мо- делирования двигателя постоянного тока последовательного возбуждения. Коэффи-
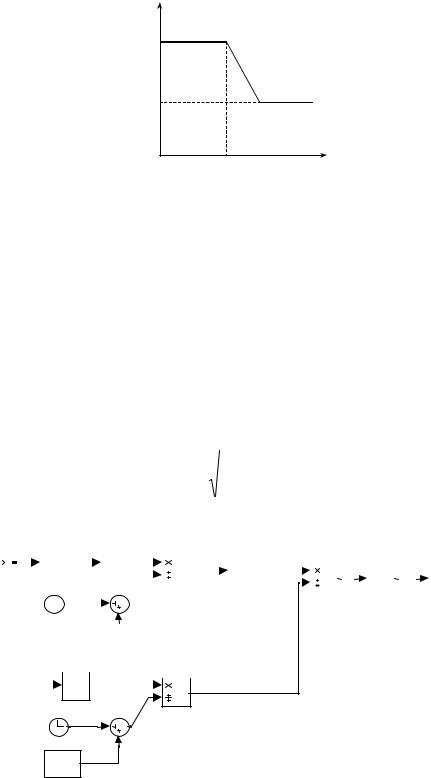
циент намагничивания КФ задать в виде кусочно-линейной зависимости следующе- го вида:
2,5КФН
КФН
0,6IЯН IЯН IЯ
2. Собрать структурную схему модели в среде системы Simulink. Источник напряже- ния реализовать в виде широтно-импульсного преобразователя. При этом скваж- ность модуляции задать равной 0.5, что соответствует наибольшему значению ам- плитуды пульсаций тока якорной цепи. Частоту модуляции выбрать по условию КF = 1.02, где КF — коэффициент формы тока якорной цепи, определяемый как отно- шение среднеквадратичного значения тока к его среднему значению:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
K F = |
iср.кв |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
iср |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
∫ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
iср = |
1 |
∞i(t)dt; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
∫ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
|
|
= |
|
|
1 |
|
∞i 2 (t)dt; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ср |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Структурная схема для определения коэффициента формы КF имеет следующий |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
вид: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
u 2 |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Iср.кв |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
s |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
sqrt |
|
|
|
|
|
|
|
|
|
|
|u| |
|
|
|
0 |
|
|
||||
|
|
|
|
|
Math |
Integrator |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
Function |
|
|
|
|
|
|
|
|
|
Product |
|
|
|
|
|
Math |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Product2 |
|
|
Abs |
|
Display |
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Function1 |
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
Clock |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.0001 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
Constant |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Iср |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
s
Integrator1
Product1
Clock1
0.0001
Constant1

3.Смоделировать пуск и торможение двигателя с номинальной скоростью (Uу макс = 10 В) при линейном задании напряжения управления ШИП. Скорость нарастания на-
пряжения управления ограничить исходя из ограничения пускового тока на уровне 2,5*Iн. Провести следующие сеансы моделирования:
a)Статический момент равен номинальному моменту двигателя Мс = Мном, момент инерции равен Jн = 1,7*Jд;
b)С увеличенным и уменьшенным статическим моментом (Мс1 = 2*Мном, Мс2 = 0,2*Мном)
c)С увеличенным моментом инерции (J = 2*Jн).
Для каждого случая моделирования построить график зависимости коэффициента формы тока от времени и провести анализ влияния на него изменённых параметров электропривода.
4.Смоделировать пуск и торможение двигателя с пониженной скоростью (Uу макс=1 В). Выполнить все сеансы моделирования, указанные в пункте 3.
5.Выполнить анализ полученных результатов и полученных графиков.
Параметры двигателей последовательного возбуждения.
|
|
|
|
|
|
|
|
|
|
|
|
Ва- |
Pном, |
Uном, |
nном, |
2a |
RЯ, |
J, |
Iном, |
N |
ωв |
Rв, |
Ф, |
риант |
кВт |
В |
об/мин |
Ом |
кг*м2 |
A |
Ом |
10-2 Вб |
|||
1 |
2,4 |
220 |
1150 |
2 |
1,63 |
0,05 |
15 |
990 |
83 |
0,59 |
0,45 |
|
|
|
|
|
|
|
|
|
|
|
|
2 |
3,6 |
220 |
1040 |
2 |
0,94 |
0,125 |
22 |
920 |
92 |
0,28 |
0,57 |
|
|
|
|
|
|
|
|
|
|
|
|
3 |
4,8 |
220 |
970 |
2 |
0,57 |
0,15 |
28 |
696 |
82 |
0,26 |
0,83 |
|
|
|
|
|
|
|
|
|
|
|
|
4 |
6,8 |
220 |
900 |
2 |
0,42 |
0,3 |
39 |
738 |
67 |
0,11 |
0,86 |
5 |
9,5 |
220 |
1190 |
2 |
0,19 |
0,3 |
53 |
492 |
67 |
0,11 |
0,95 |
|
|
|
|
|
|
|
|
|
|
|
|
6 |
13,5 |
220 |
1100 |
2 |
0,12 |
0,425 |
72 |
372 |
39 |
0,05 |
1,47 |
|
|
|
|
|
|
|
|
|
|
|
|
Содержание отчёта
1.Описание модели, реализованной в системе структурного моделирования Simulink.
2.График тока и скорости при скважности γ = 0,5 при коэффициенте формы КF = 1,02.
3.Графики тока и скорости при разгоне двигателя до максимальной и пониженной скорости при различных значениях параметров электропривода.
4.Графики коэффициента формы тока двигателя при разгоне двигателя до макси- мальной и пониженной скорости при различных значениях параметров электропри- вода.
5.Анализ влияния параметров электропривода на динамические характеристики и на форму тока двигателя.