

1. Задачи / Образцы выполненных СРС 1-12 МАТЕСО / 4 / Демидов СРС_4_Демидов_8512_после КТ1
.docФедеральное агентство по образованию
Томский политехнический университет
Кафедра Оптимизации систем управления
Отчет по выполнению самостоятельной работы студента №4
«вторая геометрическая интерпретация»
Выполнил студент группы 8512
Демидов А. С.
Принял к.т.н., доцент
Ротарь В. Г.
Томск – 2004
1. Сформировать задачу раскроя материалов (см. решение СРС 3) с матрицей условий размерностью [2;5]
Ограничивающие условия:
По изделию C:
![]() ;
;
По изделию B:
![]() ;
;
![]() ;
;
Целевая функция:
![]() .
.
2. Решить задачу ЛП размерностью [2;5] геометрически в пространстве условий, когда уравнения ограничений записаны в канонической форме (в виде равенства)
![]() ;
;
![]()
![]() ;
;
![]() .
.
2.1. Проекция сечения
конуса плоскостью
![]() :
:
Для построения
данной проекции необходимо найти точки
встречи конуса и плоскости
![]() .
Для этого будем рассматривать по одному
лучу конуса, находя соответствующие
значения
.
Для этого будем рассматривать по одному
лучу конуса, находя соответствующие
значения
![]() из равенства
из равенства
![]() и умножая их на соответствующие
коэффициенты в
и умножая их на соответствующие
коэффициенты в
![]() .
.
Таблица 1. Точки
встречи конуса и плоскости
![]() .
.
-
Значение
Значение
3’595
599,17

898,75
299,58
8’987,5
898,75
3’595
898,75

8’388,33
1’189,33
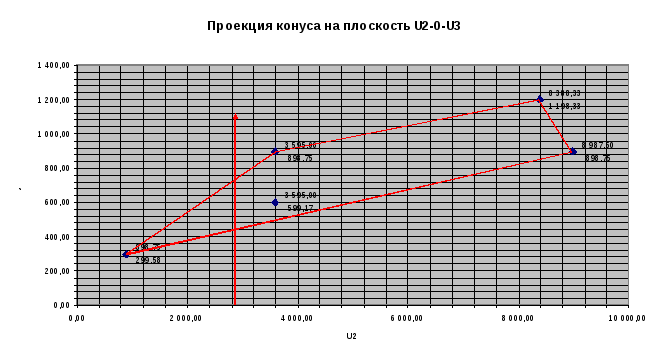
График, демонстрирующий
сечение конуса плоскостью
![]() .
.
2.2. Проекция сечения
конуса плоскостью
![]() :
:
Выполняется аналогично предыдущему пункту.
Таблица 2. Точки
встречи конуса и плоскости
![]() .
.
-
Значение
Значение


3’595
599,17

898,75
299,58
8’987,5
898,75

3’595
898,75
8’388,33
1’189,33
График, демонстрирующий
сечение конуса плоскостью
![]() .
.
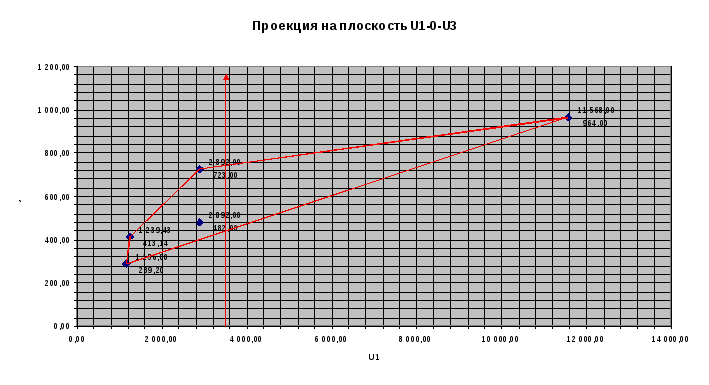
Выводы из проекций:
в обеих проекциях одно значение целевой
функции, которое единственное
(соответствует варианту
![]() ):
):
при минимизации целевой функции составит примерно 447;
при максимизации целевой функции – 742.
2.3. Определение структуры опорного плана (базиса) на основе геометрического представления. Опорный план:
![]() ;
;
![]()
![]() .
.
Остальные лучи, а
именно луч соответствующий переменной
![]() ,
является линейно зависимым, то есть
выражается через другие лучи (другие
переменные).
,
является линейно зависимым, то есть
выражается через другие лучи (другие
переменные).
Качественное решение задачи ЛП при максимизации и минимизации целевой функции будет следующим:
При максимизации:
целевая функция равна примерно 742, а
оптимальные переменные:
![]() .
.
При минимизации:
целевая функция равна примерно 473, а
оптимальные переменные:
![]() .
.
2.4. Значения базисных переменных оптимального плана.
Значения переменных находим из системы уравнений с двумя неизвестными.
Для максимизации целевой функции:
Решая данную
систему уравнений, найдем, что
![]() ,
а
,
а
![]() .
Целевая функция будет равна соответственно
.
Целевая функция будет равна соответственно
![]() .
.
Для минимизации целевой функции:
Решая данную
систему уравнений, найдем, что
![]() ,
а
,
а
![]() .
Целевая функция будет равна соответственно
.
Целевая функция будет равна соответственно
![]() .
.
3. Решить задачу
(max,
min)
для задачи, когда ограничения записаны
в форме неравенства (![]() ):
):
![]() ;
;
![]()
![]() ;
;
![]() .
.
При минимизации
целевой функции все
![]() .
Так как минимум будет в нулевой точке
пересечения координат.
.
Так как минимум будет в нулевой точке
пересечения координат.
При максимизации
целевой функции, в моем случае, ответ
будет
![]() ,
,
![]() ,
а целевая функция
,
а целевая функция
![]() .
.
4. Возможные варианты:
4.1.
![]() – единственное решение задачи линейного
программирования. Данный случай
демонстрируется выше.
– единственное решение задачи линейного
программирования. Данный случай
демонстрируется выше.
4.2.
![]() – бесконечное множество решений. Все
векторы линейно зависимы, при этом
вектор ограничения должен пройти строго
через полученную прямую. На проекции
данный случай представляет точку.
– бесконечное множество решений. Все
векторы линейно зависимы, при этом
вектор ограничения должен пройти строго
через полученную прямую. На проекции
данный случай представляет точку.
При этом и минимум, и максимум целевой функции будут совпадать.
4.3.
![]() – нет решения, целевая функция не
ограничена сверху либо снизу. Проекция
дает незамкнутую фигуру либо сверху,
либо снизу.
– нет решения, целевая функция не
ограничена сверху либо снизу. Проекция
дает незамкнутую фигуру либо сверху,
либо снизу.

4.4.
![]() – система условий несовместна. На
проекции вектор ограничений не
пересекается (проходит мимо) выпуклой
фигуры.
– система условий несовместна. На
проекции вектор ограничений не
пересекается (проходит мимо) выпуклой
фигуры.
