

1. Задачи / Образцы выполненных СРС 1-12 МАТЕСО / 4 / Морланг SelfWork4MorlangOlga8512
.doc
МИНИСТЕРСТВО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ
ТОМСКИЙ ПОЛИТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
ФАКУЛЬТЕТ АВТОМАТИКИ И ВЫЧИСЛИТЕЛЬНОЙ ТЕХНИКИ
Кафедра оптимизации систем управления
САМОСТОЯТЕЛЬНАЯ РАБОТА № 4
Интерпретация задачи линейного программирования в пространстве условий
Выполнила
Студентка О.В.Морланг
IV курс, группа 8512
« 27 » ноября 2004 г.
Проверил
В.Г.Ротарь
«__» _______ 200 __ г.
Томск, 2004
4.1. Сформировать задачу раскроя материалов из СРС-3 с матрицей условий размерностью [2;5].
Ограничения из самостоятельной работы № 3 выглядят следующим образом:
6*Х1 + 4*Х2 + 6*Х3 + 2*Х4 + 13*Х5 = 1605;
6*Х1 + 5*Х2 + 10*Х3 + 8*Х4 + 2*Х5 = 1302;
Целевая функция:
Z(x) = X1 + X2 + X3 + X4 + X5 min
4.2. Решить задачу линейного программирования размерностью [2;5] геометрически в пространстве условий, когда уравнения ограничений записаны в канонической форме (в виде равенства).
U1 = 6*Х1 + 4*Х2 + 6*Х3 + 2*Х4 + 13*Х5 = 1605;
U2 = 6*Х1 + 5*Х2 + 10*Х3 + 8*Х4 + 2*Х5 = 1302
U3 = X1 + X2 + X3 + X4 + X5 min(max)
4.3. Найти решение задачи линейного программирования проекции для двух сечений конуса:
4.3.1. Проекция сечения конуса плоскостью U1 = b1.
4.3.2. Проекция сечения конуса плоскостью U2 = b2.
Полученные результаты сравнить.
4.3.1. Проекция сечения конуса плоскостью U1 = b1.
Проекция (см.график 1) построена с помощью нахождения точек встречи конуса и плоскости U1 = b1. Для этого мы рассмотрели по одному лучу конуса, находя соответствующие значения Xi из равенства U1, умножая их на соответствующие коэффициенты в U2.
-
Точки встречи луча с секущей плоскостью U1:
1302; 1042; 781,2; 325,5; 8463.
-
Точки встречи луча с секущей плоскостью U0:
217; 260; 130; 163; 651.
-
П
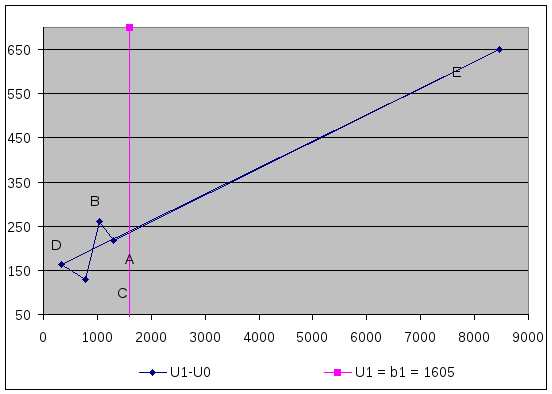
График 1. Проекция сечения конуса плоскостью U1 = b1
рямая U1 = b1= 1605.
Для нахождения точки минимума q и максимума Q найдём точки пересечения прямой U1 с прямыми DЕ[(325,5; 163); (8643; 651)] и АЕ [(1302;217); (8643; 651)].
Составляем каноническое уравнение с неизвестной точкой Х:
(U1 – D1)/(E1-D1) = (X – D2)/(E2 – D2)
(1605 – 325,5)/(8463 – 325,5) = (X – 163)/(651 – 163)
X = 239,5
Точка Q имеет координаты (1605; 239,5).
(U1 – А1)/(E1-А1) = (X – А2)/(E2 – А2)
(1605 – 1302)/(8463 – 1302) = (Х – 217)/(651 – 217)
Х = 235,4
Точка q имеет координаты (1605; 235,4).
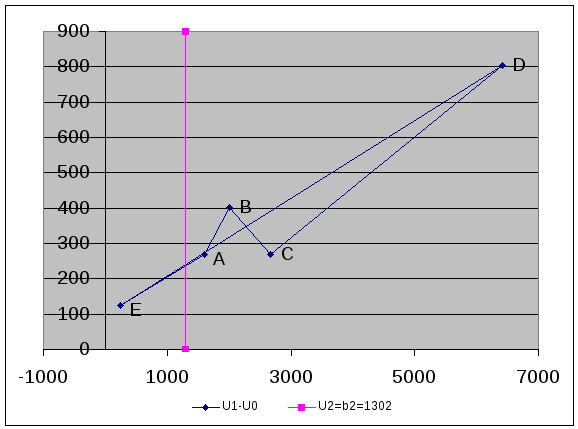
4.3.2. Проекция сечения конуса плоскостью U2 = b2.
Аналогично случаю 4.3.1.:
-
Точки встречи луча с секущей плоскостью U1:
1605; 2006,25; 2675; 6420; 246,9231.
-
Точки встречи луча с секущей плоскостью U0:
267; 401,25; 267,5; 802,5; 123,4615.
-
П
 рямая
U2
= b2=
1302.
рямая
U2
= b2=
1302.
График
2. Проекция сечения конуса плоскостью
U2
= b2
Для нахождения точки минимума q и максимума Q найдём точки пересечения прямой U2 с прямыми ED[(246,9231; 123,4615); (6420; 802,5)] и EA [(246,9231; 123,4615); (1605; 267,5)].
Составляем каноническое уравнение с неизвестной точкой Х:
(U2 – E1)/(D1-E1) = (X – E2)/(D2 – E2)
(1302 – 246,9231)/(6420 – 246,9231) = (X – 123,4615)/(802,5 – 123,4615)
X = 235
Точка q имеет координаты (1302; 235).
(U2 – E1)/(A1-E1) = (X – E2)/(A2 – E2)
(1302 – 1302)/(8463 – 1302) = (Х – 217)/(651 – 217)
Х = 239,5
Точка Q имеет координаты (1302;239,5).
Сравнивая полученные значения, обнаружим, что целевая функция имеет максимумом и минимумом одни и те же точки, 239,5 и 235 соответственно, независимо от условий.
4.3.3. Найти качественное решение задачи линейного программирования при максимизации и минимизации целевой функции Z(х), определить структуру опорного плана (базиса) на основе геометрического представления.
Опорный базис:
6*Х1 + 4*Х2 + 2*Х4 + 13*Х5 = 1605;
6*Х1 + 5*Х2 + 8*Х4 + 2*Х5 = 1302;
При максимизации целевая функция достигает значения 239,52. Оптимальными переменными, при этом, являются Х4 и Х5.
При минимизации целевая функция достигает значения 235. Оптимальными переменными, при этом, являются Х1 и Х5.
4.3.4. Найти значения базисных переменных оптимального плана Х* и Z(Х*) для обоих случаев (max, min).
Для нахождения значений базисных переменных решаем следующие системы уравнений:
Для максимизации целевой функции:
2 Х4
+ 13Х5
= 1605;
Х4
+ 13Х5
= 1605;
8Х4 + 2Х5 = 1302.
Х4 = 137,16; Х5 = 102,36.
Z(X) = 239,52.
Для минимизации целевой функции:
6 Х1
+ 13Х5
= 1605;
Х1
+ 13Х5
= 1605;
6Х1 + 2Х5 = 1302.
Х1 = 207; Х5 = 28.
Z(X) = 235.
4.4. Решить задачу (max, min) для задачи, когда ограничения записаны в форме неравенства ().
U1 = 6*Х1 + 4*Х2 + 6*Х3 + 2*Х4 + 13*Х5 ≤ 1605;
U2 = 6*Х1 + 5*Х2 + 10*Х3 + 8*Х4 + 2*Х5 ≤ 1302;
U3 = X1 + X2 + X3 + X4 + X5 min(max).
Z(X)min = 0, т.к. Хi(i = 1,5) = 0.
Z(X)max = 239,52, т.к. Х4 и Х5, в нашем случае, равны 137,16 и 102,36 соответственно.
4.5. Записать аналитически уравнения задачи ЛП и отобразить в пространстве условий для следующих вариантов
4.5.1. А1 - единственное решений задачи линейного программирования
Случай, рассматриваемый в вышеприведённом решении.
4.5.2. А2 - бесконечное множество решений.
В
 данном случае рассматриваемая фигура
конуса будет представлять собой прямую,
с которой совпадает целевая функция.
Строго через эту прямую проходит вектор
ограничения. Все векторы линейно
зависимы. В пространстве условий данный
случай представляет точку (см. график
3). Максимум и минимум целевой функции
в этом случае совпадают.
данном случае рассматриваемая фигура
конуса будет представлять собой прямую,
с которой совпадает целевая функция.
Строго через эту прямую проходит вектор
ограничения. Все векторы линейно
зависимы. В пространстве условий данный
случай представляет точку (см. график
3). Максимум и минимум целевой функции
в этом случае совпадают.
График
3. Бесконечное множество решений в
пространстве условий
4.5.3. В1 – нет решения, целевая функция не ограничена сверху (max Z(x)) либо снизу (min Z(x)).
 Полученная
фигура (см.график 4) не ограничена либо
снизу, либо сверху.
Полученная
фигура (см.график 4) не ограничена либо
снизу, либо сверху.
График
4. Неограниченная целевая функция в
пространстве условий
4.5.4. В2 – система условий несовместна.
В этом случае мы имеем несовместимость
условий, т.е. вектор ограничений не имеет
общей области с пространством условий.
этом случае мы имеем несовместимость
условий, т.е. вектор ограничений не имеет
общей области с пространством условий.