

Министерство образования и науки Российской Федерации
Федеральное государственное автономное образовательное учреждение высшего профессионального образования Российский государственный профессионально-педагогический университет
Институт электроэнергетики и информатики
Кафедра электрооборудования и автоматизации промышленных предприятий
Курсовая работа по дисциплине
«Электрический привод»
Тема: «Проектирование электропривода механизма перемещения стола продольно-строгального станка с усилием резания 30 кН»
Исполнитель
студент группы ЗЭМ-501
Руководитель А.А. Емельянов
Екатеринбург 2014
СОДЕРЖАНИЕ
Реферат 4
|
Введение |
4 |
|
1. Задание и исходные данные к проекту |
8 |
|
2. Выбор типа электропривода |
12 |
|
3. Выбор и проверка электродвигателя |
14 |
|
3.1 Расчёт мощности двигателя |
14 |
|
3.2 Предварительный выбор двигателя |
17 |
|
3.3 Расчет передаточного числа редуктора 3.4 Расчет и построение нагрузочной диаграммы двигателя |
19 20 |
|
3.5 Проверка двигателя по нагреву |
28 |
4. Выбор основных узлов силовой части электропривода 29
4.1Выбор тиристорного преобразователя 29
4.2 Выбор силового трансформатора 30
4.3 Выбор сглаживающего реактора 31
4.4 Разработка принципиальной электрической схемы силовой части электропривода 32
5. Расчет параметров математической модели силовой части электропривода 35
5.1 Расчет параметров силовой чисти электропривода в абсолютных единицах 35
5.2 Выбор базисных величин системы относительных единиц 37
5.3. Расчет параметров силовой части электропривода в относительных единицах 38
5.4 Расчет коэффициентов передачи датчиков 41
6. Разработка системы управления электроприводом 42
6.1. Выбор типа системы управления электроприводом 42
6.2 Расчет регулирующей части контура тока якоря 44
6.2.1. Расчет параметров математической модели контура тока. 44
6.2.2 Конструктивный расчет регулятора тока 50
6.3 Расчет регулирующей части контура скорости 53
6.3.1. Расчет параметров математической модели контура скорости 53
6.3.2. Конструктивный расчет регулирующей части контура скорости 55
6.4 Расчет задатчика интенсивности 57
6.4.1. Расчет параметров математической модели задатчика интенсивности 57
6.4.2 Конструктивный расчет задатчика интенсивности 58
7. Основы теории систем подчиненного регулирования 61
7.1 Обобщенная схема многоконтурной системы подчиненного регулирования 61
7.2. Синтез регуляторов 62
7.2.1. Синтез регулятора первого контура и его свойства 63
8. Системы регулирования тока якоря 67
8.1. Функциональная схема САР тока якоря 67
8.2. Синтез регуляторов тока якоря 68
8.3. Анализ свойств САР тока якоря 69
9. Моделирование в MatLab. 73
9.1 Математическая модель двигателя постоянного тока, включающая контур тока якоря 73
Заключение 75
Список использованных источников 76
РЕФЕРАТ
Курсовой проект содержит 77 листа печатного текста, 36 иллюстраций, 2 таблицы, 9 использованных источников.
Произведен расчет силовой части системы: «Тиристорный преобразователь – ДПТ НВ», включающий в себя:
предварительный выбор двигателя;
расчет и построение нагрузочной диаграммы и проверка двигателя на нагрев;
выбор тиристорного преобразователя;
моделирование электропривода в MATLAB.
ВВЕДЕНИЕ
Строгальные станки предназначены для обработки резцами плоскостей и фасонных линейчатых поверхностей. Они делятся на поперечно-строгальные, продольно- строгальные и долбежные. Первые применяются при изготовлении мелких и средних по размерам деталей, вторые сравнительно крупных или для одновременного строгания нескольких деталей среднего размерам. Долбежные станки используют для обработки шпоночных пазов, канавок фасонных поверхностей небольшой длины. Станки имеют рабочий ход, во время которого происходит резание, и обратный ход, когда инструмент возвращается в исходное положение.
Размерной характеристикой продольно-строгальных станков являются наибольшие размеры обрабатываемых деталей (ширина, длина, высота). Промышленность Советского Союза выпускает, станки от 630×2000×550 до 5000×125000×1250 мм включительно выпускаются в одностоечном исполнении.
У продольно-строгальных станков подвижной частью является стол с закрепленной на нем заготовкой. В зависимости от устройства поперчены, различают одностоечные и двустоечные станки. Первые применяют для обработки крупных деталей, ширина которых выходит за пределы расстояния между колоннами станков двустоечного исполнения.
На рис. 1 показан продольно-строгальный станок 7212. На нем можно строгать детали с наибольшими размерами 1250×4000×1120 мм. На направляющих 1 станины 2 размещен стол 3, на котором закрепляются обрабатываемые детали. Он получает возвратно-поступательное движение. На двух порталах (стойках) 4 и 5 установлена траверса, несущая два вертикальных суппорта 8. В направляющих правого портала может иметь вертикальные перемещения боковой суппорт. В коробке 10 расположен привод главного движения, в коробках 7 и 9 – приводы вертикальных и боковых суппортов.
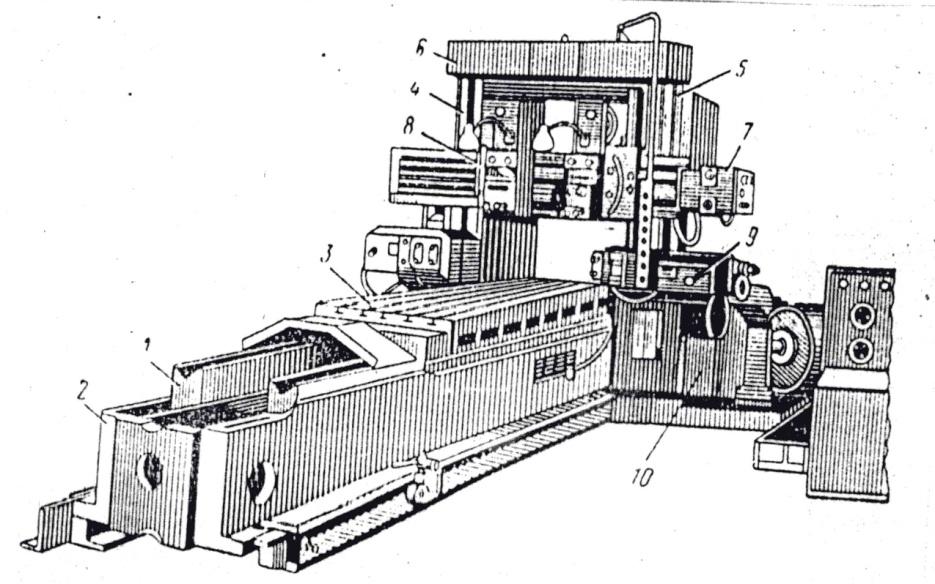
Рис. 1. Продольно-строгальный станок 7212
Главное движение осуществляется от регулируемого электродвигателя переменного тока. Рабочий ход передается через двухступенчатую коробку скоростей на передачу червяка – рейка по следующему циклу: медленное перемещение стола при врезании резца в заготовку, разгон стола до рабочей скорости перед выходом резца из заготовки, возврат стола в исходное положение. Для изменения скоростей имеется специальный механизм, смонтированный на коробке скоростей. Реверсирование осуществляется электродвигателем.
Движение подачи осуществляется реверсивным электродвигателем, от которого вращение передачи червячной парой на вал коробки подач. На этом валу на шпонке смонтирован диск, на котором установлен фрикцион, связанный пальцем с диском, несущем собачку храпового механизма. Собачка вращает храповое колесо и связанное с ним колесо. От него вращение передается на раздаточный вал и далее через зубчатые колеса на колеса, связанные с полумуфтами. Верхний и нижний валы служат для горизонтального перемещения суппортов, а средние валы для вертикального перемещения.
Периодическая подача суппортов осуществляется следующим образом. В момент реверсирования стола с обратного хода на рабочий подается команда электродвигателя. Вращение его происходит до тех пор, пока разжимная планка фрикциона не упрется в неподвижный упор и не разожмет фрикцион. При нажатии кулачка наконечник реверса стола в начале рабочего хода электродвигатель отключается. Механизм подачи бокового суппорта устроен аналогичным образом. Установка подачи осуществляется храповым колесом. При его вращении приводится в движение подвижный упор. При этом изменяется угол между подвижным и не подвижным упорами тем самым величина подачи.
Установочные перемещения заимствуют движение от электродвигателя, который вращается в направлении рабочей подачи. Одновременно включается электромагнит, который сцепляет червячное колесо с храповым колесом при помощи кулачковой муфты. Далее движение следует по предыдущему. Кнопка установочного перемещения находится на подвесной станции, на которой располагаются и другие кнопки управления. Кроме кнопок управления, на станке имеются средства ручного управления и наладочного перемещения суппортов.