

3 и 8 схема / еще 8 / схема8 / моя8схема / Схема 8мне
.doc
М инистерство
общего и профессионального
инистерство
общего и профессионального
образования России
Санкт-Петербургский государственный
политехнический университет
Механико-машиностроительный факультет
Кафедра «Теория механизмов и машин»
Пояснительная записка
к курсовой работе на тему
Кинематический и силовой анализ рычажных механизмов
-
Студент
Чесноков П.В. гр. 2044/1
Студент (Ф.И.О. № группы)
Руководитель работы
Петров Г.Н.
Ф.И.О.
Санкт-Петербург
2007
СОДЕРЖАНИЕ
|
ВВЕДЕНИЕ ……………………………………………………………………………… СХЕМА I: кривошипно-шатунный механизм ЧАСТЬ I «Кинематика» ……………………………………………………………
ЧАСТЬ II «СИЛОВОЙ РАСЧЕТ» ……………………………………………………...
2.1 Определение коэффициентов пропорциональности………………………... 2.2 Определение реакций связей из условий равновесия звеньев……………...
ЧАСТЬ III «ПРИЛОЖЕНИЯ»…………………………………………………………...
СХЕМА II: кулисный механизм ЧАСТЬ I «Кинематика» ……………………………………………………………
ЧАСТЬ II «СИЛОВОЙ РАСЧЕТ» ……………………………………………………...
2.1 Определение коэффициентов пропорциональности………………………... 2.2 Определение реакций связей из условий равновесия звеньев……………...
ЧАСТЬ III «ПРИЛОЖЕНИЯ»…………………………………………………………...
|
4
5 5 5 6 6 7 8 9 9 9 10 10 11
12 12 13 13 13 14 14 14 14 17 18
29 29 29
30 30 31 32 33 33 33 34 34 35
36 36 37 37 37 38 38 38 38 41 42 |
ВВЕДЕНИЕ
Целью курсового проекта является изучение назначения, устройства и работы кулисного механизма, а также определение и расчет его параметров.
Исследования, проводимые с данным кулисным механизмом, условно делятся на две части.
В первой части курсового проекта проведены:
-
Структурный анализ, обеспечивающий определение состава и связей элементов механизма;
-
Геометрический анализ, включающий в себя составление плана двенадцати положений механизма в масштабе, групповые уравнения определенных точек и их решение (для одного положения проведено численное решение);
-
Кинематический анализ, в результате которого определен план скоростей и ускорений для двух положений механизма, а также получено аналитическое выражение аналогов скоростей и ускорений;
-
Графики функций движения вертикального ползуна и ее производных по обобщенной координате;
-
Сравнение результатов, полученных при проведении расчетов с эталонными.
Во второй части курсового проекта, в соответствии с исходными данными, проведены исследования, в результате которых:
-
Определены задаваемые силы и силы инерции;
-
Составлены уравнения кинетостатики;
-
Осуществлено как аналитическое решение составленных уравнений, так и графоаналитическое решение (получены планы сил);
-
Проведена оценка результатов расчетов путем сравнения их с контрольными результатами.
Сравнение полученных результатов с контрольными, позволяет сделать вывод о чистоте исследований и достоверности расчетов.
Ч
Рисунок 1
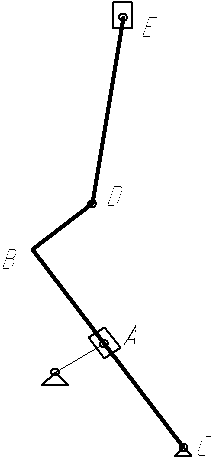
Рисунок 2. Расчетная
схема кулисного механизма

-
Исходные данные
Из заданной базовой схемы (Рисунок 1) путем изменения линейных параметров (длины) звеньев можно получить расчетную схему кулисного механизма (Рисунок 2), анализ которого будет приведен ниже.
Параметры механизма:
ОА=0.15м;
ХС=-0.34м;
УС=-0.2м; Х3D=0.2м;
У3D=0.66м;
DE=0.5м;
ХЕ=0.18м ;
М2=1;
ω=4 1/с.
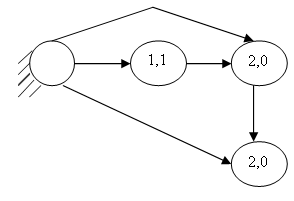
2. Структурный анализ
Рисунок 3. Структурный граф механизма 4. Граф механизма
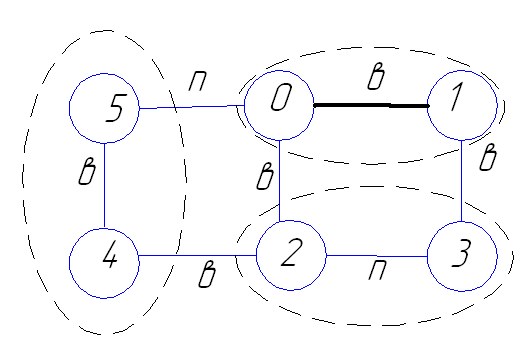
Число
подвижных звеньев механизма
![]() количество
кинематических пар совпадает с числом
подвижностей пар
количество
кинематических пар совпадает с числом
подвижностей пар
![]()
Число степеней подвижности для расчетного механизма определяется по формуле Чебышева для плоских механизмов:
W=3(N-1)-2PH-PB, (1)
Где N-число звеньев механизма, РН- число низших кинематических пар, РВ-число высших кинематических пар.
W=3(6-1)-2ּ7=1
3. Геометрический анализ
Геометрический анализ включает построение плана механизма в различных положениях в зависимости от входной координаты (q), составление групповых уравнений и их решения в общем виде.
-
Групповые уравнения и их решение
Групповыми уравнениями определяются координаты характеристических точек при различных положениях частей механизма в зависимости от входной координаты. Для расчетного механизма групповые уравнения имеют вид:
Д ля
кривошипа:
ля
кривошипа:
XA = LOACos(q) (2)
YA = LOASin(q)
Для группы ВПВ:
 XA
=
XC+LACCos(2) (3)
XA
=
XC+LACCos(2) (3)
YA = YC+LACSin(2)
Возведем два уравнения в квадрат и сложим:
LAC 2 = (XA -XC)2+(YA -YC)2
X D
=
XC+LDCCos(2)
(3)
D
=
XC+LDCCos(2)
(3)
YD = YC+LDCSin(2)
А затем значение угла 2:
Cos(2) = (XА – XC)/LАC (5)
Sin(2) = (YА- YC)/LАC (6)
Д ля
группы ВВП: XE
= XD
+ LEDCos(4)
(7)
ля
группы ВВП: XE
= XD
+ LEDCos(4)
(7)
YE = YD + LEDSin(4)
Система (8) имеет две неизвестных: XЕ и 4. 4 можно найти, выразив его из второго уравнения системы (8), полагая, для общего случая, что YB=Const:
Cos(4) = (XE – XD)/LED (8)
![]() (9)
(9)
Решив эти уравнения и подставив их в систему (8) можно найти координаты ползуна E.
(Соответствующие углы и точки обозначены на плане 12 положений механизма, рис.5;
решения соответствующих групповых уравнений содержатся в приложенном файле Mathcad)
3.3 Особые положения и сборки
Группа ВПВ:
Якобиан системы уравнений группы ВПВ
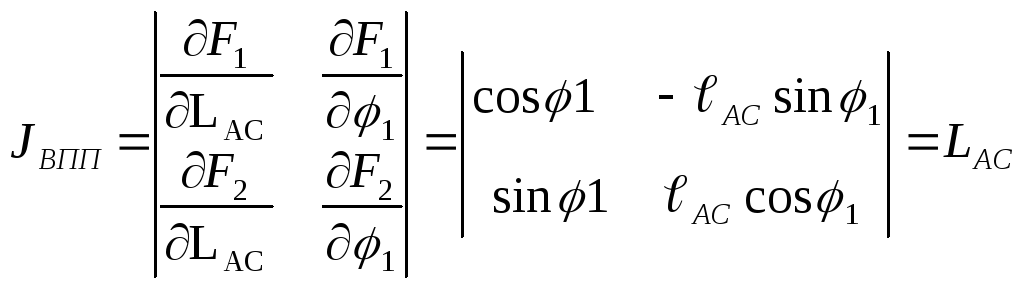
Группа ВПВ попадет в особое положение при выполнении условия:
![]()

Рисунок
5
Группа ВПВ:
Особое положение группы ВВП имеет место при выполнении условия:
![]()
Рисунок
6 Рисунок
7
4. Кинематический анализ:
4.1 Аналитическое определение аналогов скоростей
Д ля
кривошипа:
ля
кривошипа:
XA` = -LOASin(q)
YA` = LOACos(q)
Д ля
группы ВПВ:
ля
группы ВПВ:
XA` = LАС`Cos(2) – LАСSin(2)2`
Y A`
= Lас`Sin(2)
+ LасCos(2)2`
A`
= Lас`Sin(2)
+ LасCos(2)2`
XD` = -LDCsin(2) 2` (3)
YD` = LDCcos(2) 2`
Д ля
группы ВВП:
ля
группы ВВП:
XE` = 0=XD` – LED Sin(4)4`
YE` = YD` + LEDCos(4) 4`
-
Аналитическое определение аналогов ускорений
Д ля
кривошипа:
ля
кривошипа:
XA`` = -LOACos(q)
YA`` = -LOASin(q)
Для группы ВПВ:
XA`` = LAC``Cos(2) – 2Lac`Sin(2) 2` – LАСCos(2)(2`)2 – LАСSin(2)2``
Y
 A``
= LAC``Sin(2)
+ 2LАС`Cos(2)2`
– LАСSin(2)(2`)2
+ LАСCos(2)2``
A``
= LAC``Sin(2)
+ 2LАС`Cos(2)2`
– LАСSin(2)(2`)2
+ LАСCos(2)2``
XD`` = XA`` – X2D(Cos(2)(2`)2 + Sin(2)2``) – Y2D(Cos(2)2`` – Sin(2)(2`)2)
YD`` = YA`` + X2D(Cos(2)2`` – Sin(2)(2`)2) – Y2D(Cos(2)(2`)2 + Sin(2)2``)
Д ля
группы ВВП:
ля
группы ВВП:
XE`` =0= XD`` – LED(Cos(4)( 4`)2 + Sin(4)4``)
YE`` = YD`` + LED(Cos(4)4`` – Sin(4)(4`)2)
(Решения соответствующих групповых уравнений содержатся в приложенном файле Mathcad)
4.3 Графоаналитическое определение аналогов скоростей
Векторные уравнения для скоростей:
![]()
![]()
Коэффициент пропорциональности аналогов скоростей:
![]()
Вычисление аналогов скоростей для q=30гр.
![]()
![]()
![]()
![]()
Вычисление аналогов скоростей для крайнего положения.
![]()
![]()
![]()
![]()
4.4 Графоаналитическое определение аналогов ускорений
Векторные уравнения для ускорений:
![]()
![]()
![]()
![]()
![]()
Коэффициент пропорциональности аналогов ускорений:
![]()
Вычисление аналогов ускорений для q=30гр.
![]()
![]()
![]()
![]()
Вычисление аналогов ускорений для q=30гр.
![]()
![]()
![]()
![]()
(Соответствующие планы аналогов скоростей и ускорений содержатся в части III«ПРИЛОЖЕНИЯ»)
ЧАСТЬ II «СИЛОВОЙ РАСЧЕТ»
1. Определение рабочей нагрузки:
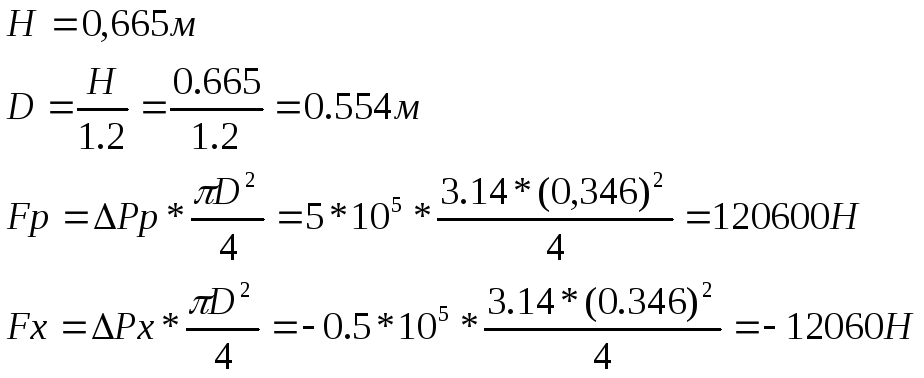
Рисунок 9. План положений механизма при q=30гр

2. Статический расчет механизма:
2.1 Определение коэффициентов пропорциональности:
Коэффициент пропорциональности рабочей нагрузки
![]()
Коэффициент пропорциональности размеров механизма
![]()
2.2 Определение реакций связей из условий равновесия:
Условие равновесия звена 5:
![]()
![]()
![]()
![]()
Условие равновесия звена 4:
![]()
![]()
![]()
![]()
Условие равновесия звена 2:
![]()
где
![]()
![]()
![]()
![]()
![]()
Условие равновесия кривошипа:
![]() откуда
откуда
H = h · Kh = 0,19;
![]()
Соответствующий план положения реакций связей содержится в части III«ПРИЛОЖЕНИЯ»
3. Кинетостатический расчет механизма:
3.1 Исходные данные:
LOA = 0,15 м;
LDE = 0,5 м;
=4,0 с-1
MOA = 4,5 кг
MСАD = (0,66*30 + 0,2*30)кг
MDE = 15 кг
JDE = 0,3125 кгм2
MC = 5 кг
JC = 0
ME = 26 кг
JE = 0
3.2 Определение задаваемых сил и сил инерции:
Силы инерции в проекциях на оси X и Y определяются по следующим формулам:
Фix=-miXCi``i2
Фiy=-miYCi``i2
Mi(Ф)=-Ji i``i2
Где XCi`` и YCi`` координаты ускорений центров масс звеньев
3.3 Составление уравнений кинетостатики:
1. Рассмотрим звенья 4 и 5:
Рисунок
10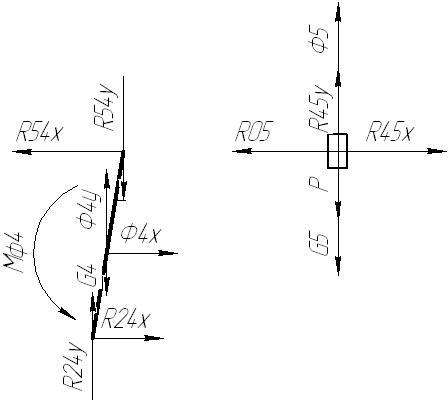
Из уравнений кинетостатики звена 5

и звена 4:

найдем реакции в шарнирах (R24), (R45) и реакцию опоры (R05).
2. Рассмотрим звено 2:
Рисунок
11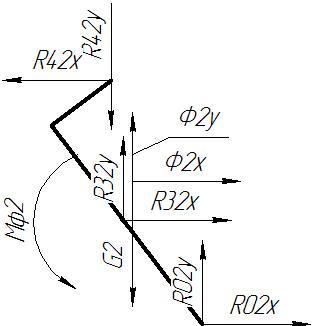
Из уравнений кинетостатики звена 2

найдем реакции в шарнирах (R32, R12):
Кривошип:
Рисунок
12
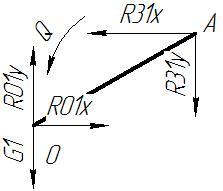
Из уравнений кинетостатики кривошипа
![]()
![]()
![]()
найдем движущий момент
![]()
Найдем движущий момент Q с помощью общего уравнения динамики:
![]()
![]()
(Решения соответствующих уравнений кинетостатики содержатся в приложенном файле Mathcad)
4. Сравнение результатов, полученных различными методами:
(для q=30гр.)
|
|
Статический расчет
|
Кинетостатический расчет
|
|
R05 |
19888 |
19880 |
|
R24x |
19888 |
19880 |
|
R24y |
-120000 |
-120000 |
|
R45х |
19888 |
19880 |
|
R45у |
120000 |
120000 |
|
R32х |
96106 |
96110 |
|
R32у |
7342 |
7350 |
|
R12х |
96106 |
96110 |
|
R12у |
7342 |
7350 |
|
Q |
-2350 |
2360 |