Курсовой проект Дисциплина: ТММ 2008 год
тема: «кинематический и силовой анализ рычажных механизмов»
Разработал студент группы 3044/1 Чесноков Павел Владимирович Руководитель: Петров Геннадий Николаевич
В данном курсовом проекте нам необходимо выбрать и обосновать кинематическую схему прижима для резальной машины.
Количество выбираемых прототипов - два.
По результатам кинематического расчёта для этих прототипов производим выбор механизма по оптимальным параметрам и выполняем силовой расчёт, выбираем двигатель и проводим кинематическое исследование машинного агрегата.
Основными оценочными критериями являются габариты, масса, виброактивность, энергопотребление

В качестве исходных данных заданы
технические характеристики механизма:
1.)Ход рабочего звена HMAX=300мм
2.)Максимальная нагрузка PMAX=2800 Н
3.)Производительность n=30 ход/мин
Прижим резальной машины
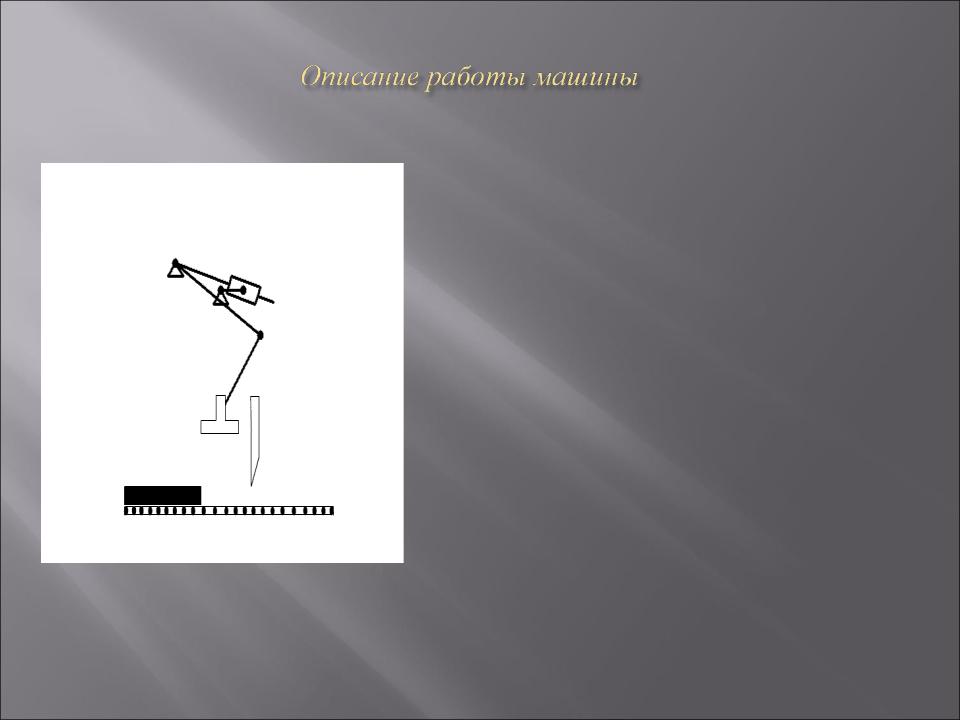
Прижим предназначен для фиксации объекта для последующей процедуры отрезания объекта в соответствии с требованиями.
В рычажном механизме вращательное движение кривошипа преобразуется в возвратно-поступательное движение ползуна.
Прижимание объекта осуществляется с помощью ползуна. Рычажный механизм спроектирован так, чтобы обеспечить выстой рабочего звена в верхней точке, на время выстоя фиксируется и, впоследствии, отрезается отрезается объект.

ВЫБОР КРИТЕРИЕВ СИНТЕЗА ИСПОЛНИТЕЛЬНОГО МЕХАНИЗМА
Для того, чтобы спроектировать механизм, необходимо сначала выбрать один из двух прототипов будущего прижима по
оптимальным параметрам, а затем провести синтез по выбранным критериям с целью получения механизма, соответствующего техническому заданию.
В качестве критериев синтеза выберем следующие:
1) габариты;
2) масса;
3) виброактивность;
4) энергопотребление.
Станок резальный THOMAS
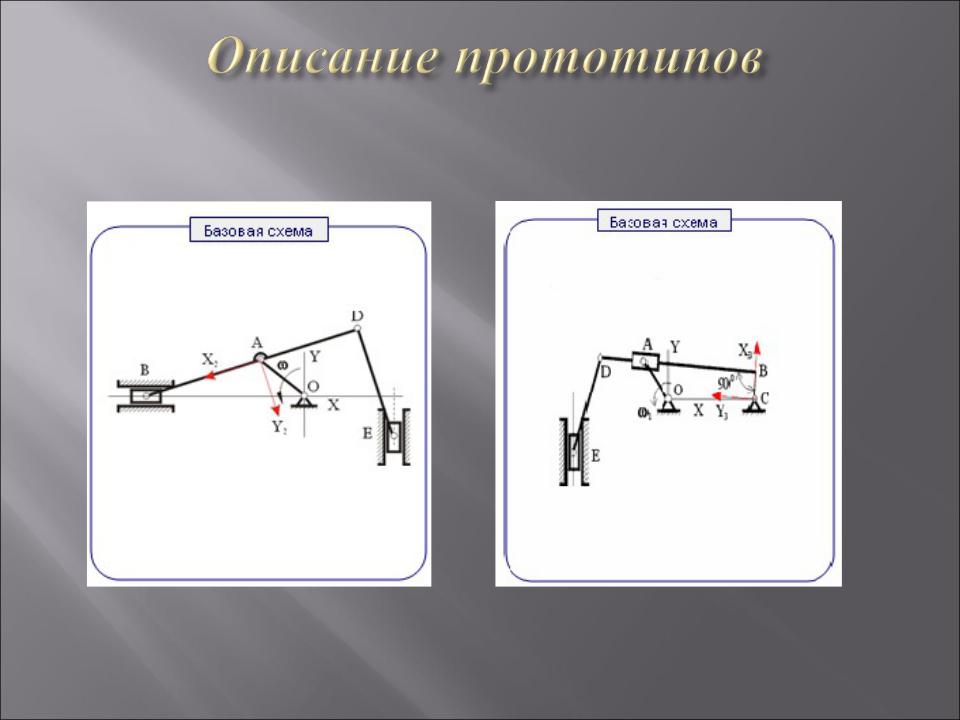
Рассматривалось два прототипа.

СТРУКТУРНЫЙ АНАЛИЗ
Механизм состоит из трёх групп:
кривошипа (входное звено),
Группы ВВП (для первого прототипа), группы ВВП (для второго)
группы ВВП.
Выходным звеном является ползун,
который перемещается вертикально.
Звенья 2 и 3 образуют
структурную группу ВВП (для первого), группу ВВП
(для второго), а звенья 4 и 5 – структурную группу
ВВП.
ГЕОМЕТРИЧЕСКИЙ
АНАЛИЗ
Основной задачей геометрического анализа является определение геометрических параметров прототипа.
Он включает в себя:
1. План 12-ти положений.
2. Групповые уравнения.
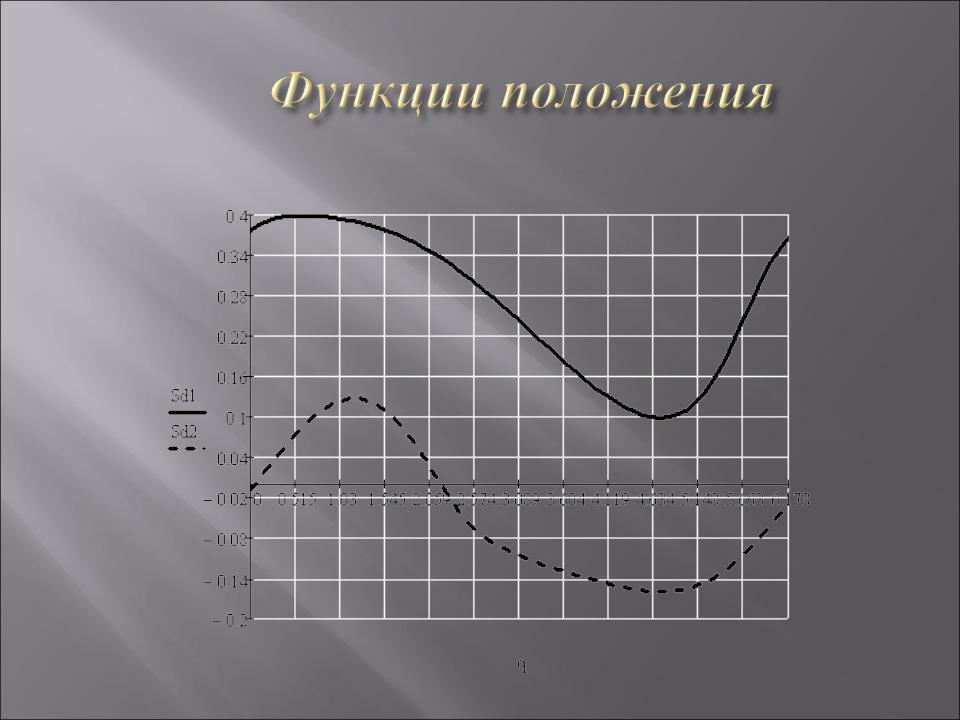
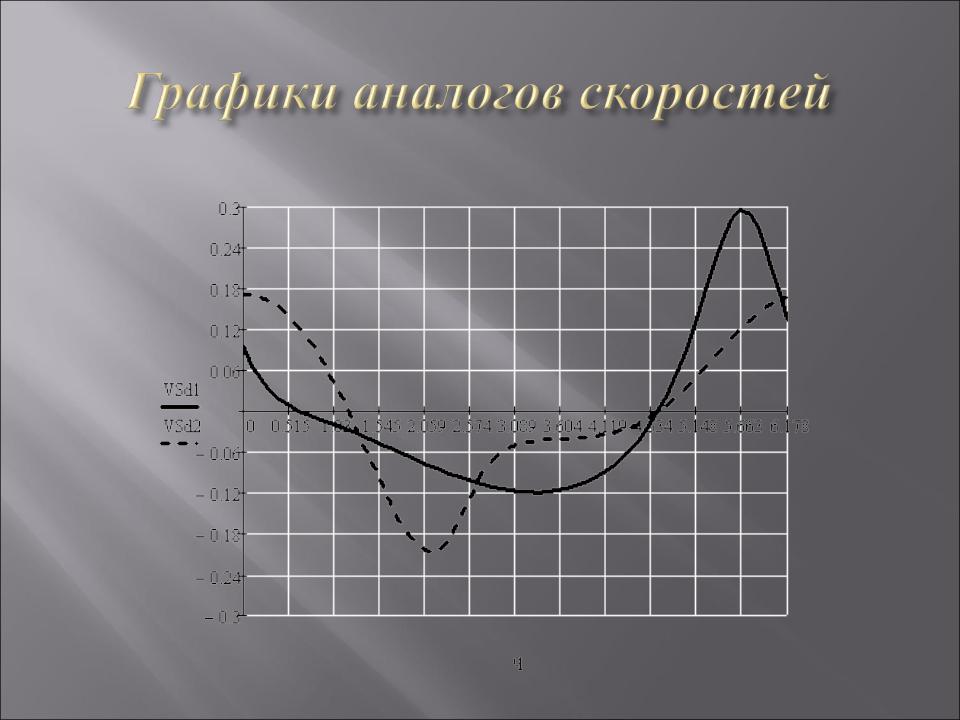
3. Исследование функции положения. В исследование входит построение графика функции положения для прототипа и его анализ.
Прототип 1.
В результате синтеза механизма были получены следующие значения:
ОА=0.06 м, DE=0,18 м, Xс=-0,12 м, Yc=-0,06 м, X3D=0,08 м, Y3D=0,264 м, Xе=0,4м.
Способ сборки М=1
Прототип 2.
В результате синтеза механизма были получены следующие значения:
ОА=0,1 м, DE=0,4 м, XC=0.1 м, YC= -0.1 XE=-0,15 м, Х2D=0.5 м,
Способ сборки М=1