

Частина I. Електродинаміка вакуума розділ 1. Ортогональні системи координат
Положення точки в просторі може бути задано тільки по відношенню до іншої точки, яку приймаємо за початок відліку. Одним з можливих спосо-бів завдання положення точки є векторний спосіб. Визначимо вектор, як спрямований відрізок прямої. (Далі поняття вектора буде розвиватися глиб-ше.) Вектор, спрямований із початку відліку в точку М називається радіус-вектором точки М Очевидно, що завдання радіус-вектора однозначно виз-начає положення точки. Однак, більш зручним є координатний спосіб.
1.1 Приклади координатних систем
а)
декартова
система координат (ДСК). Положення
точки простору задається
за допомогою трьох змінних
![]() (Рис.1). Ці змінні називаються декартовими
координатами точки.Так,
декартові координати точки
(Рис.1). Ці змінні називаються декартовими
координатами точки.Так,
декартові координати точки
![]() –
–![]() .
Очевидно, що декартові
координати змінюються в границях:
.
Очевидно, що декартові
координати змінюються в границях:
![]()

Рис. 1. Декартова система координат.
б)
циліндрична система координат (ЦСК).
Циліндричними
координатами точки називаються три
змінні
![]()
![]() (Рис.2), які однозначно визначають
положення точки в просторі.
(Рис.2), які однозначно визначають
положення точки в просторі.![]() - радіус,який
з’єднує
початок відліку та проекцію точки на
площину
- радіус,який
з’єднує
початок відліку та проекцію точки на
площину
![]() ,
,
![]() - кут між віссю
- кут між віссю
![]() та радіусом
та радіусом
![]() .
.
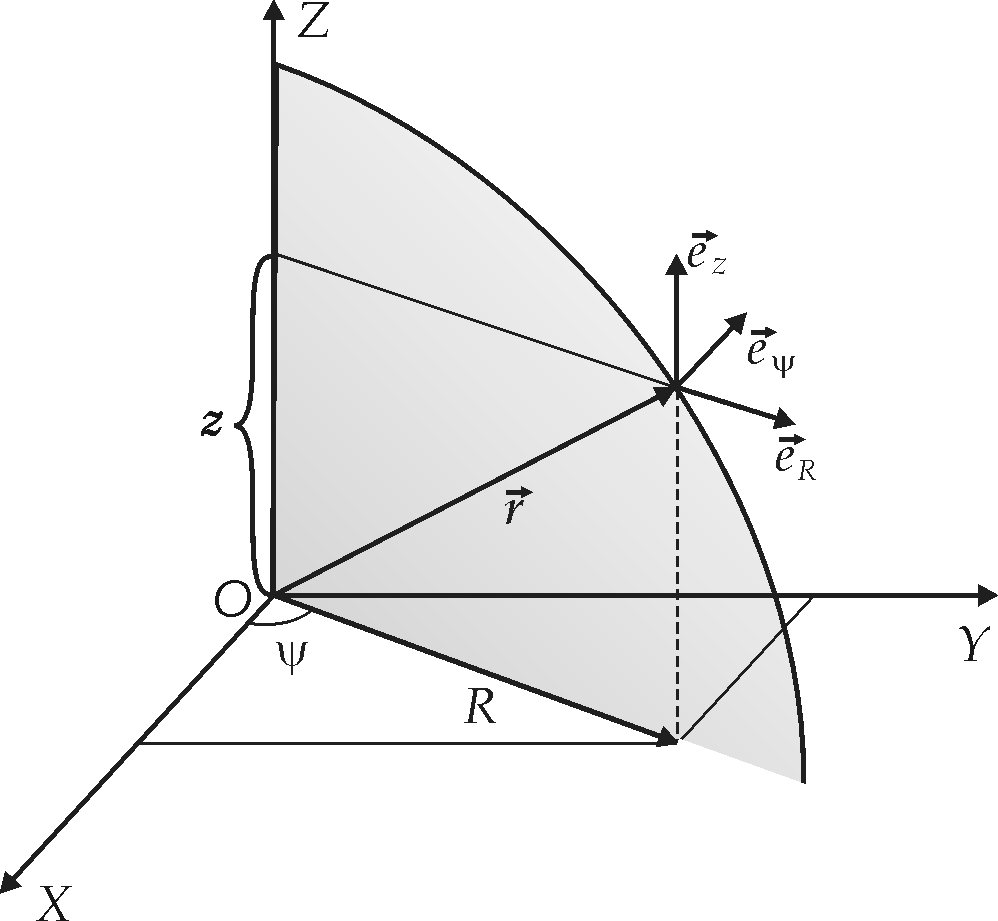
Рис. 2. Циліндрична система координат.
Кут
![]() прийнято називати азимутальним кутом.
Циліндричні координати змінюються в
межах:
прийнято називати азимутальним кутом.
Циліндричні координати змінюються в
межах:
![]() .
.
Із рисунка видно, що декартові кординати точки пов’язані з ії циліндричними координатами співвідношеннями:
![]() .
(1.1)
.
(1.1)
Обернене перетворення має вигляд:
![]() . (1.2)
. (1.2)
в)
сферична система координат (ССК).
Сферичними
координатами точки називаються три
змінні
![]() (Рис.3), які однозначно визначають
положення точки в просторі:
(Рис.3), які однозначно визначають
положення точки в просторі:![]() - відрізок, який з’єднує початок відліку
ССК та точку
- відрізок, який з’єднує початок відліку
ССК та точку
![]() ,
тобто, радіус,
,
тобто, радіус,
![]() - кут між віссю
- кут між віссю![]() та радіусом
та радіусом
![]() ,
,
![]() -
кут
між віссю
-
кут
між віссю
![]() та проекцією радіус-вектора точки
та проекцією радіус-вектора точки![]() на площину (
на площину (![]() ).
Кути
).
Кути![]() і
і![]() прийнято називати полярним та азімутальним
кутами відповідно. Очевидно, що сферичні
координати точки змінюються в межах:
прийнято називати полярним та азімутальним
кутами відповідно. Очевидно, що сферичні
координати точки змінюються в межах:
![]() .
.
Зв’язок декартових та сферичних координат визначається співвідношеннями:
![]() . (1.3)
. (1.3)
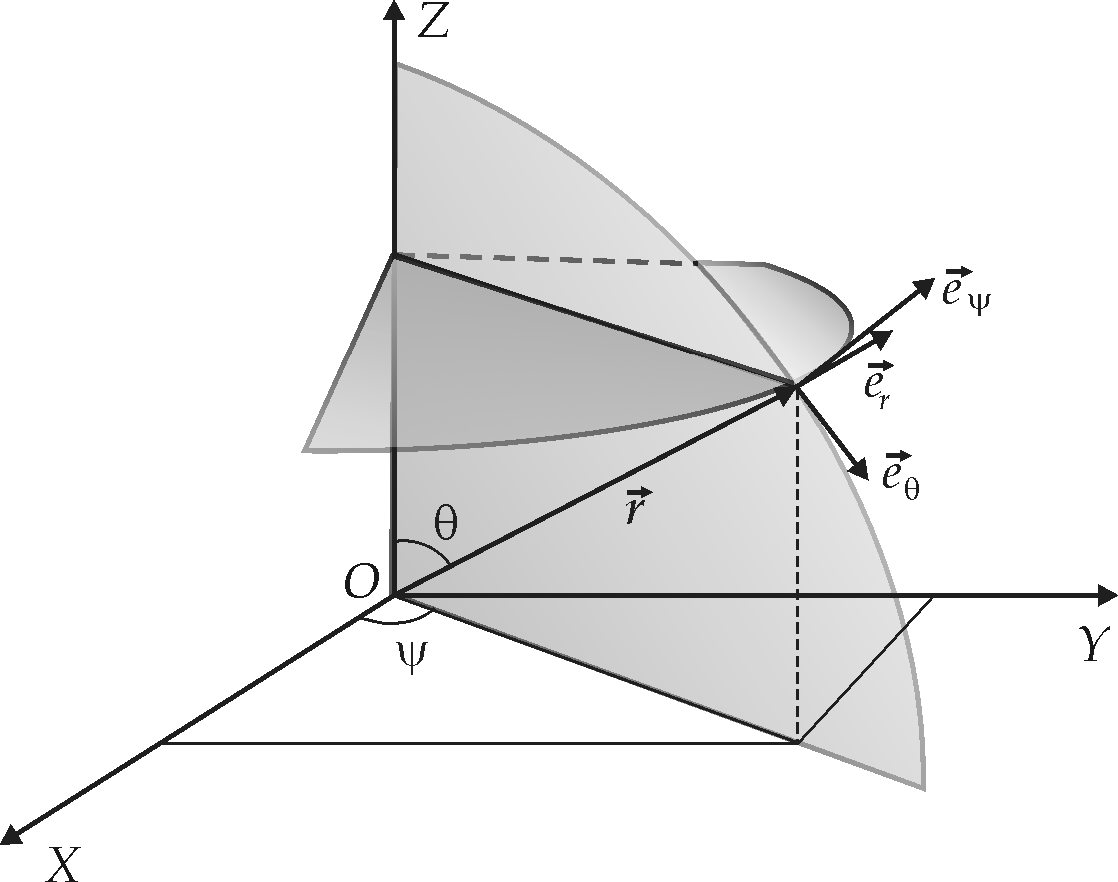
Рис. 3. Сферична система координат.
Обернений зв’язок описується формулами:
![]() (1.4)
(1.4)
1.2 Координатні лінії та базисні орти
Нехай
задана довільна система координат.
Положення будь-якої точки в ній задається
трьома координатами:
![]() .
Нехай початкове положення точки
.
Нехай початкове положення точки![]() визначається координатами:
визначається координатами:![]() .
Будемо рухати точку
.
Будемо рухати точку![]() так, щоб змінювалась тільки одна з
координат, наприклад
так, щоб змінювалась тільки одна з
координат, наприклад![]() .
Дві інші координати (
.
Дві інші координати (![]() )
залишаються незмінними. Точка
)
залишаються незмінними. Точка
![]() опише в просторі лінію, яку називатимемо
координатною лінією, що відповідає
координаті
опише в просторі лінію, яку називатимемо
координатною лінією, що відповідає
координаті![]() .
Фіксуючи інші значення
.
Фіксуючи інші значення![]() ,
одержимо нескінчену множину координатних
ліній, що відповідають координаті
,
одержимо нескінчену множину координатних
ліній, що відповідають координаті
![]() .
Аналогічно будуються сімейства
координатних ліній для координат
.
Аналогічно будуються сімейства
координатних ліній для координат![]() .
З цього випливає, що через
кожну точку простору можна провести
три координатні лініі, що відповідають
різним координатам.
.
З цього випливає, що через
кожну точку простору можна провести
три координатні лініі, що відповідають
різним координатам.
Вектор,
який має одиничну довжину та спрямований
за дотичною до координатної лініі в
сторону зростання відповідної координати,
називається базисним ортом
![]() ,
що відповідає цій координаті. Очевидно,
що з кожної точки виходить три базисних
орта, що відповідають різним координатам.
Ця трійка складає базис. Довільний
вектор
,
що відповідає цій координаті. Очевидно,
що з кожної точки виходить три базисних
орта, що відповідають різним координатам.
Ця трійка складає базис. Довільний
вектор![]() можна представити, причому єдиним чином,
у вигляді розкладу за базисними ортами:
можна представити, причому єдиним чином,
у вигляді розкладу за базисними ортами:
![]() , (1.5)
, (1.5)
де
![]() - скалярні
функціі координат, які називаються
компонентами вектора
- скалярні
функціі координат, які називаються
компонентами вектора
![]() у
даному базисі. Є
справедливим,
також, і обернене твердження:
завдання компонентів
у
даному базисі. Є
справедливим,
також, і обернене твердження:
завдання компонентів
![]() однозначно визначає вектор
однозначно визначає вектор![]() .
.
Якщо в кожній точці простору всі базисні орти є взаємно ортогональними, то система координат називається ортонормованою. Ця умова формалізується співвідношеннями між скалярними добутками базисних ортів:
![]() ,
,
де ![]() позначає
символ Кронекера
позначає
символ Кронекера ![]() У
тривимірному просторі він дорівнює:
У
тривимірному просторі він дорівнює:
Так само, у розгорнутому вигляді умова ортонормованості базисних векторів має вигляд:
![]()
Взагалі кажучи, координатні лінії є кривими. Проте, для деяких систем координат одна або декілька ліній можуть бути прямими. Так, для ДСК всі координатні лінії є прямими. Розглянемо системи координат, які мають найбільш широке поширення.
а) ДСК: в ній використовуються позначення:
![]() .
.
Всі три координатні лініі – прямі, а базисні орти зберігають свій напрямок в усіх точках простору (див.Рис.1). Ортогональність декартових координат очевидна. Розклад радіус-вектора за базисними ортами має вигляд:
![]() . (1.6)
. (1.6)
б) ЦСК:
як
видно з рисунку (див.Рис.2), координатні
лінії, які відповідають координатам
![]() і
і![]() ,
є прямими, а координатні лінії, вздовж
яких змінюється тільки
,
є прямими, а координатні лінії, вздовж
яких змінюється тільки![]() ,
є колами. В будь-якій точці простору всі
базисні орти є взаємно ортогональними,
тобто, ЦСК за своїм типом відноситься
до криволінійних ортогональних систем
координат. Напрямок орту
,
є колами. В будь-якій точці простору всі
базисні орти є взаємно ортогональними,
тобто, ЦСК за своїм типом відноситься
до криволінійних ортогональних систем
координат. Напрямок орту![]() залишається незмінним,а
напрямки ортів
залишається незмінним,а
напрямки ортів
![]() і
і
![]() залежать
від кута
залежать
від кута
![]() .
.
Розклад радіус-вектора за базисними ортами має вигляд:
![]() (1.7)
(1.7)
в) ССК:
координатні
лінії, вздовж яких змінюється тільки
![]() ,
– це промені, які виходять з початку
координат (див.Рис.3). Координатні лініі,
які відповідають
,
– це промені, які виходять з початку
координат (див.Рис.3). Координатні лініі,
які відповідають
![]() і
і![]() ,
належать відповідно до сімейств
меридіанів та паралелей на поверхні
сфери радіуса
,
належать відповідно до сімейств
меридіанів та паралелей на поверхні
сфери радіуса![]() ,
тобто є криволінійними. Орти
,
тобто є криволінійними. Орти![]() є взаємно ортогональними, тобто ССК є
криволінійною та ортогональною.Орти
є взаємно ортогональними, тобто ССК є
криволінійною та ортогональною.Орти
![]() і
і ![]() залежать
від
кутів
залежать
від
кутів![]() і
і![]() ,
а орт
,
а орт ![]() залежить
тільки від
залежить
тільки від
![]() .
.
Розклад радіус-вектора за базисними ортами має вигляд:
![]() . (1.8)
. (1.8)